RL实践3——为Agent添加Policy、记忆功能
参考自知乎(叶强)
Introduction
在实践2中,介绍了gym环境的定义和使用方法。
在实践1中,介绍了 动态规划DP 求解 价值函数
并没有形成一个策略Policy\(\pi\)来指导agent的动作选取,本节将利用SARSA(0)的学习方法,帮助agent学习到价值函数(表),指导\(\epsilon\)-greedy策略选取动作。
Agent的写法
Agent的三要素是:价值函数、策略、模型
本节以Sarsa(0)为例,介绍为agent添加policy的方法
Sarsa(0)是不基于模型的控制,其动作选择策略是\(\epsilon\)-greedy,根据价值函数选择动作。
对于一般问题,Agent包括如下功能
- 对环境的引用
- 自身变量:Q值,状态值的记忆
- 策略方法
- 动作执行方法
- 学习方法:改进策略,这部分是关键
class Agent():
def __init__(self, env: Env):
self.env = env # 个体持有环境的引用
self.Q = {} # 个体维护一张行为价值表Q
self.state = None # 个体当前的观测,最好写成obs.
def performPolicy(self, state): pass # 执行一个策略
def act(self, a): # 执行一个行为
return self.env.step(a)
def learning(self): pass # 学习过程
Agent class
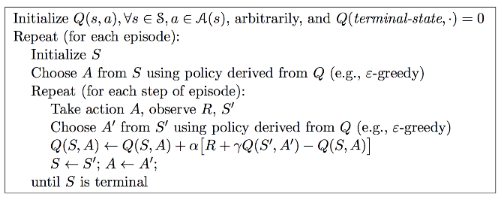
SARSA(0)的伪算法流程如下:
核心方法:learning
def learning(self, gamma, alpha, max_episode_num):
# self.Position_t_name, self.reward_t1 = self.observe(env)
total_time, time_in_episode, num_episode = 0, 0, 0
while num_episode < max_episode_num: # 设置终止条件
self.state = self.env.reset() # 环境初始化
s0 = self._get_state_name(self.state) # 获取个体对于观测的命名
self.env.render() # 显示UI界面
a0 = self.performPolicy(s0, num_episode, use_epsilon = True)
time_in_episode = 0
is_done = False
while not is_done: # 针对一个Episode内部
# a0 = self.performPolicy(s0, num_episode)
s1, r1, is_done, info = self.act(a0) # 执行行为
self.env.render() # 更新UI界面
s1 = self._get_state_name(s1)# 获取个体对于新状态的命名
self._assert_state_in_Q(s1, randomized = True)
# 获得A'
a1 = self.performPolicy(s1, num_episode, use_epsilon=True)
old_q = self._get_Q(s0, a0)
q_prime = self._get_Q(s1, a1)
td_target = r1 + gamma * q_prime
#alpha = alpha / num_episode
new_q = old_q + alpha * (td_target - old_q)
self._set_Q(s0, a0, new_q)
if num_episode == max_episode_num: # 终端显示最后Episode的信息
print("t:{0:>2}: s:{1}, a:{2:2}, s1:{3}".\
format(time_in_episode, s0, a0, s1))
s0, a0 = s1, a1
time_in_episode += 1
print("Episode {0} takes {1} steps.".format(
num_episode, time_in_episode)) # 显示每一个Episode花费了多少步
total_time += time_in_episode
num_episode += 1
return
策略方法:performPolicy
通过改变use_epsilon参数,可以切换SARSA 和 Q-learning
相同在于:
- 都用\(\epsilon\)-greedy策略进行了探索
区别在于:
Q-learning:更激进,最优更新
- update: \(greedy\)策略,评估过程的A'没有实际执行
- control:\(\epsilon-greedy\)策略
SARSA:更新和执行都用\(\epsilon-greedy\)策略
def performPolicy(self, s, episode_num, use_epsilon):
epsilon = 1.00 / (episode_num+1)
Q_s = self.Q[s]
str_act = "unknown"
rand_value = random()
action = None
if use_epsilon and rand_value < epsilon:
action = self.env.action_space.sample()
else:
str_act = max(Q_s, key=Q_s.get)
action = int(str_act)
return action
将Sarsa(0)升级为 Sarsa(\(\lambda\))
Sarsa(\(\lambda\))相较于Sarsa(0)来说,引入了视野权重的概念,不是值考虑单步的价值更新,更新方式分为前向视角和后向视角
对于离散问题的Sarsa(\(\lambda\))来说,agent不仅需要维护一张Q值表,还需要维护一张E值(迹)表
- 伪算法如下
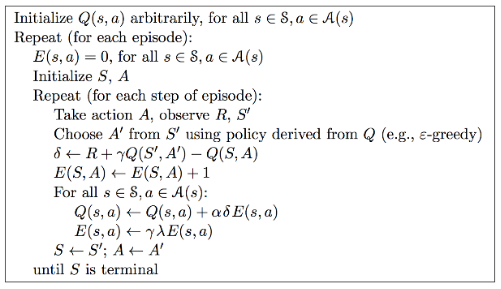
与上节的Sarsa(0)的主要不同,体现在2个方面
- Agent元素, 增加了E值,在时间尺度内记录(s,a)元组的迹值
- Learning方法中,用后向视角更新,这样可以TD更新,不用MC更新,效率更高些
E值是依附于episode存在的,每个episode初始化时,一并清零。
def learning(self, lambda_, gamma, alpha, max_episode_num):
total_time = 0
time_in_episode = 0
num_episode = 1
while num_episode <= max_episode_num:
self._resetEValue()
s0 = self._name_state(self.env.reset())
a0 = self.performPolicy(s0, num_episode)
# self.env.render()
time_in_episode = 0
is_done = False
# episode循环
while not is_done:
s1, r1, is_done, info = self.act(a0)
# self.env.render()
s1 = self._name_state(s1)
self._assert_state_in_QE(s1, randomized = True)
a1= self.performPolicy(s1, num_episode)
q = self._get_(self.Q, s0, a0)
q_prime = self._get_(self.Q, s1, a1)
delta = r1 + gamma * q_prime - q
e = self._get_(self.E, s0,a0)
e = e + 1
self._set_(self.E, s0, a0, e) # set E before update E
state_action_list = list(zip(self.E.keys(),self.E.values()))
for s, a_es in state_action_list:
for a in range(self.env.action_space.n):
e_value = a_es[a]
old_q = self._get_(self.Q, s, a)
new_q = old_q + alpha * delta * e_value
new_e = gamma * lambda_ * e_value
self._set_(self.Q, s, a, new_q)
self._set_(self.E, s, a, new_e)
if num_episode == max_episode_num:
print("t:{0:>2}: s:{1}, a:{2:10}, s1:{3}".
format(time_in_episode, s0, a0, s1))
s0, a0 = s1, a1
time_in_episode += 1
print("Episode {0} takes {1} steps.".format(
num_episode, time_in_episode))
total_time += time_in_episode
num_episode += 1
return
- 程序解读
- 在上述程序中,以
dict的形式存储E、Q值E:dict = {key(s:string),value(a:dict)}这种数据结构解释了,通过遍历E.keys()和a[i], for in range self.env.action_space.n,for s,a_es in state_action_list即可遍历状态、动作空间组成的元组(s,a),即E[s_name][a_name] - 在值的更新中,没有的创建更新到E、Q值的dict中,进而创建的list
赋值的时候,先检测存不存在`_assert()不存在执行init
- 在上述程序中,以
def _is_state_in_Q(self, s):
return self.Q.get(s) is not None
def _init_state_value(self, s_name, randomized = True):
if not self._is_state_in_Q(s_name):
self.Q[s_name], self.E[s_name] = {},{}
for action in range(self.env.action_space.n):
default_v = random() / 10 if randomized is True else 0.0
self.Q[s_name][action] = default_v
self.E[s_name][action] = 0.0
def _assert_state_in_QE(self, s, randomized=True):
if not self._is_state_in_Q(s):
self._init_state_value(s, randomized)
def _name_state(self, state):
'''给个体的一个观测(状态)生成一个不重复的字符串作为Q、E字典里的键
'''
return str(state)
def _get_(self, QorE, s, a):
self._assert_state_in_QE(s, randomized=True)
return QorE[s][a]
def _set_(self, QorE, s, a, value):
self._assert_state_in_QE(s, randomized=True)
QorE[s][a] = value
def _resetEValue(self):
for value_dic in self.E.values():
for action in range(self.env.action_space.n):
value_dic[action] = 0.00
给Agent添加记忆功能
以上章节的实现,是基于agent的E、Q值表,对于离散的、有限个的状态空间和动作空间,实现没问题。同时没有记忆功能的Agent只能进行单一episode的学习,无法对其他的episode学习,无法进行batch学习,上限较低,对于复杂问题,为了增强学习的鲁棒性,往往需要输入数据的规模扩充,也就是对Agent有了记忆能力的要求。
实现方式
抽象基类Agent
为了让代码具有较高的复用性和可读性,提现python的集成和多态特性,将Agent抽象为一个基类,在子类中实现记忆功能。
class Agent(object):
'''Base Class of Agent
'''
def __init__(self, env: Env = None,
trans_capacity = 0):
# 保存一些Agent可以观测到的环境信息以及已经学到的经验
self.env = env
self.obs_space = env.observation_space if env is not None else None
self.action_space = env.action_space if env is not None else None
self.experience = Experience(capacity = trans_capacity)
# 有一个变量记录agent当前的state相对来说还是比较方便的。要注意对该变量的维护、更新
self.state = None # current observation of an agent
def performPolicy(self,policy_fun, s):
if policy_fun is None:
return self.action_space.sample()
return policy_fun(s)
def act(self, a0):
s0 = self.state
s1, r1, is_done, info = self.env.step(a0)
# TODO add extra code here
trans = Transition(s0, a0, r1, is_done, s1)
total_reward = self.experience.push(trans)
self.state = s1
return s1, r1, is_done, info, total_reward
def learning(self):
'''need to be implemented by all subclasses
'''
raise NotImplementedError
def sample(self, batch_size = 64):
'''随机取样
'''
return self.experience.sample(batch_size)
@property
def total_trans(self):
'''得到Experience里记录的总的状态转换数量
'''
return self.experience.total_trans
可以发现,Agent不仅维护了env和state,同时增加了一个experience,这是一个缓存,将个体其他周期记录的状态转换、奖励等信息记录下来,其作用时,利用这些时间尺度上互相无关联的信息,让Agent学习到更好的价值函数的近似估计。
包含关系如下所示:
- Experience
- Episode
- Transition
- Episode
Transition类
一个完整的状态转换(Transition)类,包括了当前的状态\(s_0\)和动作\(a_0\),以及个体执行了动作之后的奖励\(r\)和新状态\(s_1\),另外用一个bool变量记录了\(s_1\)是否是终止状态。
代码来源于:知乎(叶强)
class Transition(object):
def __init__(self, s0, a0, reward:float, is_done:bool, s1):
self.data = [s0,a0,reward,is_done,s1]
def __iter__(self):
return iter(self.data)
def __str__(self):
return "s:{0:<3} a:{1:<3} r:{2:<4} is_end:{3:<5} s1:{4:<3}".\
format(self.data[0],
self.data[1],
self.data[2],
self.data[3],
self.data[4])
@property
def s0(self): return self.data[0]
@property
def a0(self): return self.data[1]
@property
def reward(self): return self.data[2]
@property
def is_done(self): return self.data[3]
@property
def s1(self): return self.data[4]
用@property函数装饰器的方法,可以快捷的调用类中的元素,将方法调用变为属性调用
其主要用于类的定义,元素属性(只读、可写)等的定义
例如用@property装饰了myfunc,则继而可以用@myfunc.setter装饰myfunc的其他设置方法,方法中,可以写规则判断等,增加class中变量的可控性。
示例
t1 = Transition(s0,a0,r,False,s1)
t1.s0 #调用t1.s0(self)输出 t1.data[0]
Episode
Episode记录了时间序列的Transition对象,可以构建为由Transition构成的list,
- 对于离线学习来说,可以从中抓取随机个数、无序的
Transition
例子:
class Episode(object):
def __init__(self, e_id:int = 0) -> None:
self.total_reward = 0 # 总的获得的奖励
self.trans_list = [] # 状态转移列表
self.name = str(e_id) # 可以给Episode起个名字:"成功闯关,黯然失败?"
def push(self, trans:Transition) -> float:
self.trans_list.append(trans)
self.total_reward += trans.reward
return self.total_reward
@property
def len(self):
return len(self.trans_list)
def __str__(self):
return "episode {0:<4} {1:>4} steps,total reward:{2:<8.2f}".\
format(self.name, self.len,self.total_reward)
def print_detail(self):
print("detail of ({0}):".format(self))
for i,trans in enumerate(self.trans_list):
print("step{0:<4} ".format(i),end=" ")
print(trans)
def pop(self) -> Transition:
'''normally this method shouldn't be invoked.
'''
if self.len > 1:
trans = self.trans_list.pop()
self.total_reward -= trans.reward
return trans
else:
return None
def is_complete(self) -> bool:
'''check if an episode is an complete episode
'''
if self.len == 0:
return False
return self.trans_list[self.len-1].is_done
def sample(self,batch_size = 1):
'''随即产生一个trans
'''
return random.sample(self.trans_list, k = batch_size)
def __len__(self) -> int:
return self.len
Experience(Memory)
- 有些模型框架用
Memory,是乱序的Episode,这一步可以跨episode进行Transition记录和采样 Memory需要设置容量上限capacity,超过上限,从早期去除Transition
class Experience(object):
'''this class is used to record the whole experience of an agent organized
by an episode list. agent can randomly sample transitions or episodes from
its experience.
'''
def __init__(self, capacity:int = 20000):
self.capacity = capacity # 容量:指的是trans总数量
self.episodes = [] # episode列表
self.next_id = 0 # 下一个episode的Id
self.total_trans = 0 # 总的状态转换数量
def __str__(self):
return "exp info:{0:5} episodes, memory usage {1}/{2}".\
format(self.len, self.total_trans, self.capacity)
def __len__(self):
return self.len
@property
def len(self):
return len(self.episodes)
def _remove(self, index = 0):
'''扔掉一个Episode,默认第一个。
remove an episode, defautly the first one.
args:
the index of the episode to remove
return:
if exists return the episode else return None
'''
if index > self.len - 1:
raise(Exception("invalid index"))
if self.len > 0:
episode = self.episodes[index]
self.episodes.remove(episode)
self.total_trans -= episode.len
return episode
else:
return None
def _remove_first(self):
self._remove(index = 0)
def push(self, trans):
'''压入一个状态转换
'''
if self.capacity <= 0:
return
while self.total_trans >= self.capacity: # 可能会有空episode吗?
episode = self._remove_first()
cur_episode = None
if self.len == 0 or self.episodes[self.len-1].is_complete():
cur_episode = Episode(self.next_id)
self.next_id += 1
self.episodes.append(cur_episode)
else:
cur_episode = self.episodes[self.len-1]
self.total_trans += 1
return cur_episode.push(trans) #return total reward of an episode
def sample(self, batch_size=1): # sample transition
'''randomly sample some transitions from agent's experience.abs
随机获取一定数量的状态转化对象Transition
args:
number of transitions need to be sampled
return:
list of Transition.
'''
sample_trans = []
for _ in range(batch_size):
index = int(random.random() * self.len)
sample_trans += self.episodes[index].sample()
return sample_trans
def sample_episode(self, episode_num = 1): # sample episode
'''随机获取一定数量完整的Episode
'''
return random.sample(self.episodes, k = episode_num)
@property
def last(self):
if self.len > 0:
return self.episodes[self.len-1]
return None
在这个例子中Experience维护了episode列表、Capacity
函数估计器 Approximator
Introduction
但是对于连续的空间,无法构建这个表,替代的解决方案是选取一个分辨率,将连续空间离散化,但是随着状态、动作的维数增加,表的规模爆炸,带来运算量的激增,这是我们不希望看到的
这里引入函数估计器的概念,利用估计器,设计(学习)映射函数,将输入(状态、动作 等)映射到输出(E、Q值 等),对于不同复杂度的问题,选取不同规模的函数估计器,一般要求函数估计器具有非线性的映射能力。
深度强化学习,是深度学习和强化学习的结合,以深度学习的网络作为工具,嵌入到强化学习的框架之下,形成对复杂问题强有力的解决工具。
Approximator 类
原理很简单:
- 输入:状态、动作(s,a)
- 输出:价值Q(s,a,w)
对于Actor网络,输入为状态s,输出为动作a
这里的例子是 用 pytorch搭建一个简单的BP神经网络 作为 估计器 Approximator
import numpy as np
import torch
from torch.autograd import Variable
import copy
class Approximator(torch.nn.Module):
'''base class of different function approximator subclasses
'''
def __init__(self, dim_input = 1, dim_output = 1, dim_hidden = 16):
super(Approximator, self).__init__()
self.dim_input = dim_input
self.dim_output = dim_output
self.dim_hidden = dim_hidden
self.linear1 = torch.nn.Linear(self.dim_input, self.dim_hidden)
self.linear2 = torch.nn.Linear(self.dim_hidden, self.dim_output)
- 实现正向传播方法
def _forward(self, x):
h_relu = self.linear1(x).clamp(min=0) # 实现了ReLU
y_pred = self.linear2(h_relu)
return y_pred
- 实现训练方法
fit
def fit(self, x,
y,
criterion=None,
optimizer=None,
epochs=1,
learning_rate=1e-4):
if criterion is None:
criterion = torch.nn.MSELoss(size_average = False)
if optimizer is None:
optimizer = torch.optim.Adam(self.parameters(), lr = learning_rate)
if epochs < 1:
epochs = 1
x = self._prepare_data(x)
y = self._prepare_data(y, False)
for t in range(epochs):
y_pred = self._forward(x)
loss = criterion(y_pred, y)
optimizer.zero_grad()
loss.backward()
optimizer.step()
return loss
- python数据类型复杂,需要对输入数据进行一定的处理
def _prepare_data(self, x, requires_grad = True):
'''将numpy格式的数据转化为Torch的Variable
'''
if isinstance(x, np.ndarray):
x = Variable(torch.from_numpy(x), requires_grad = requires_grad)
if isinstance(x, int):
x = Variable(torch.Tensor([[x]]), requires_grad = requires_grad)
x = x.float() # 从from_numpy()转换过来的数据是DoubleTensor形式
if x.data.dim() == 1:
x = x.unsqueeze(0)
return x
__call__函数可以让类,像函数一样被调用
def __call__(self, x):
'''return an output given input.
similar to predict function
'''
x=self._prepare_data(x)
pred = self._forward(x)
return pred.data.numpy()
ApproxQagent的实现
在本节,需要实现Agent基类的初始化class ApproxQagent(Agent)继承
同时,学习的时候从ExperienceReplay中学习,避免了单个Episode内Transition相关性带来的干扰,有利于提升Agent性能。
- ApproxQAgent初始化
ApproxQAgent继承自Agent父类,第二段的初始化过程中,执行了__init__方法,super调用了父类Agent的方法__init__进行初始化
class ApproxQAgent(Agent):
'''使用近似的价值函数实现的Q学习的个体
'''
def __init__(self, env: Env = None,
trans_capacity = 20000,
hidden_dim: int = 16):
if env is None:
raise "agent should have an environment"
super(ApproxQAgent, self).__init__(env, trans_capacity)
self.input_dim, self.output_dim = 1, 1
# 适应不同的状态和行为空间类型
if isinstance(env.observation_space, spaces.Discrete):
self.input_dim = 1
elif isinstance(env.observation_space, spaces.Box):
self.input_dim = env.observation_space.shape[0]
if isinstance(env.action_space, spaces.Discrete):
self.output_dim = env.action_space.n
elif isinstance(env.action_space, spaces.Box):
self.output_dim = env.action_space.shape[0]
# print("{},{}".format(self.input_dim, self.output_dim))
# 隐藏层神经元数目
self.hidden_dim = hidden_dim
# 关键在下面两句,声明了两个近似价值函数
# 变量Q是一个计算价值,产生loss的近似函数(网络),
# 该网络参数在一定时间段内不更新参数
self.Q = Approximator(dim_input = self.input_dim,
dim_output = self.output_dim,
dim_hidden = self.hidden_dim)
# 变量PQ是一个生成策略的近似函数,该函数(网络)的参数频繁更新
self.PQ = self.Q.clone() # 更新参数的网络
- 从memory中学习
基本原理为- 从经验中采样
- 构建
s0,a0,r,is_done,s1的array - 创建网络训练集,
x_batch, y_batch - 利用训练集训练网络,并更新网络参数
def _learn_from_memory(self, gamma, batch_size, learning_rate, epochs):
trans_pieces = self.sample(batch_size) # 随机获取记忆里的Transmition
states_0 = np.vstack([x.s0 for x in trans_pieces])
actions_0 = np.array([x.a0 for x in trans_pieces])
reward_1 = np.array([x.reward for x in trans_pieces])
is_done = np.array([x.is_done for x in trans_pieces])
states_1 = np.vstack([x.s1 for x in trans_pieces])
X_batch = states_0
y_batch = self.Q(states_0) # 得到numpy格式的结果
# 使用了Batch,代码是矩阵运算,有点难理解,多通过观察输出来理解
Q_target = reward_1 + gamma * np.max(self.Q(states_1), axis=1)*\
(~ is_done) # is_done则Q_target==reward_1
y_batch[np.arange(len(X_batch)), actions_0] = Q_target
# loss is a torch Variable with size of 1
loss = self.PQ.fit(x = X_batch,
y = y_batch,
learning_rate = learning_rate,
epochs = epochs)
mean_loss = loss.sum().data[0] / batch_size
self._update_Q_net()
return mean_loss
learning方法,包含了learn from experience方法
基本原理:
- 输入网络训练超参,训练episode数,奖励衰减率等参数
- 在每个episode的生命周期,调用环境env交互,并进行学习(当Transitions数大于网络学习所需batch超参)
def learning(self, gamma = 0.99,
learning_rate=1e-5,
max_episodes=1000,
batch_size = 64,
min_epsilon = 0.2,
epsilon_factor = 0.1,
epochs = 1):
"""learning的主要工作是构建经历,当构建的经历足够时,同时启动基于经历的学习
"""
total_steps, step_in_episode, num_episode = 0, 0, 0
target_episode = max_episodes * epsilon_factor
while num_episode < max_episodes:
epsilon = self._decayed_epsilon(cur_episode = num_episode,
min_epsilon = min_epsilon,
max_epsilon = 1,
target_episode = target_episode)
self.state = self.env.reset()
# self.env.render()
step_in_episode = 0
loss, mean_loss = 0.00, 0.00
is_done = False
while not is_done:
s0 = self.state
a0 = self.performPolicy(s0, epsilon)
# act方法封装了将Transition记录至Experience中的过程,还记得吗?
s1, r1, is_done, info, total_reward = self.act(a0)
# self.env.render()
step_in_episode += 1
# 当经历里有足够大小的Transition时,开始启用基于经历的学习
if self.total_trans > batch_size:
loss += self._learn_from_memory(gamma,
batch_size,
learning_rate,
epochs)
mean_loss = loss / step_in_episode
print("{0} epsilon:{1:3.2f}, loss:{2:.3f}".
format(self.experience.last, epsilon, mean_loss))
# print(self.experience)
total_steps += step_in_episode
num_episode += 1
return
learning辅助代码
由于使用了Actor、Q值网络,无法使用表搜索的方法,根据Q值获取最佳的action,所以对curpolicy等方法进行了重写
- 衰减的$\epsilon$-greedy方法
def _decayed_epsilon(self,cur_episode: int,
min_epsilon: float,
max_epsilon: float,
target_episode: int) -> float:
'''获得一个在一定范围内的epsilon
'''
slope = (min_epsilon - max_epsilon) / (target_episode)
intercept = max_epsilon
return max(min_epsilon, slope * cur_episode + intercept)
- 选择动作方法
def _curPolicy(self, s, epsilon = None):
'''依据更新策略的价值函数(网络)产生一个行为
'''
Q_s = self.PQ(s)
rand_value = random()
if epsilon is not None and rand_value < epsilon:
return self.env.action_space.sample()
else:
return int(np.argmax(Q_s))
- 执行策略方法
def performPolicy(self, s, epsilon = None):
return self._curPolicy(s, epsilon)
- 将训练的权重参数赋值给正在执行价值估计的网络
def _update_Q_net(self):
'''将更新策略的Q网络(连带其参数)复制给输出目标Q值的网络
'''
self.Q = self.PQ.clone()
主函数
- 调用了
gym调用了环境 - 调用
wrappers监控变量 - 创建了基于Q值估计的Agent
- 初始化环境、开始学习
from random import random, choice
from gym import Env
import gym
from gridworld import *
from core import Transition, Experience, Agent
from approximator import Approximator
from agents import ApproxQAgent
import torch
def testApproxQAgent():
env = gym.make("MountainCar-v0")
#env = SimpleGridWorld()
directory = "/home/qiang/workspace/reinforce/monitor"
env = gym.wrappers.Monitor(env, directory, force=True)
agent = ApproxQAgent(env,
trans_capacity = 10000, # 记忆容量(按状态转换数计)
hidden_dim = 16) # 隐藏神经元数量
env.reset()
print("Learning...")
agent.learning(gamma=0.99, # 衰减引子
learning_rate = 1e-3,# 学习率
batch_size = 64, # 集中学习的规模
max_episodes=2000, # 最大训练Episode数量
min_epsilon = 0.01, # 最小Epsilon
epsilon_factor = 0.3,# 开始使用最小Epsilon时Episode的序号占最大
# Episodes序号之比,该比值越小,表示使用
# min_epsilon的episode越多
epochs = 2 # 每个batch_size训练的次数
)
if __name__ == "__main__":
testApproxQAgent()


