

基于DL的深度学习目标检测算法主要可分为One-Stage和Two-Stage两大类,这两类分别是不同的实现思路。
One-stage
思路:直接通过卷积神经网络进行特征提取,进行分类和回归任务。

典型算法:RCNN系列(RCNN、Fast RCNN、Faster-RCNN、Mask-RCNN),SPPNet、R-FCN
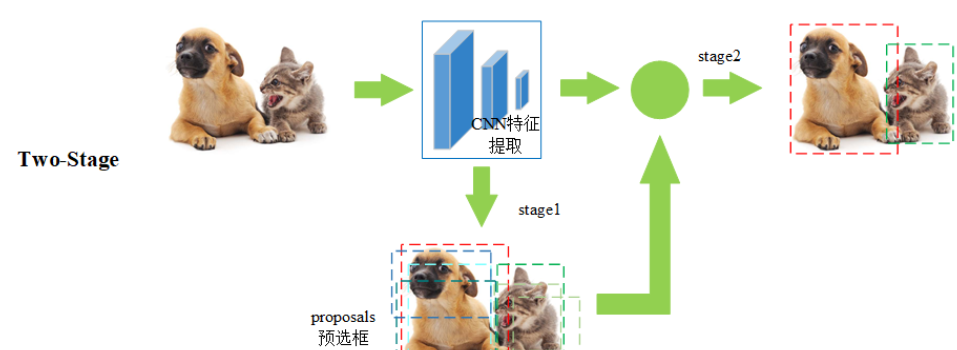
Two-Stage
思路:首先进行候选区域生成,再通过卷积神经网络进行分类和回归。
典型算法:YOLO系列(YOLOV1-YOLOV5、YOLOVX),SSD、Retina-Net
One-Stage和Two-Stage优缺点:
One-stage:
优点:推理速度快,网络的泛化性能更好,避免背景错误产生false
缺点:精度低(定位,检出率),小物体的检测效果不好
Two-Stage:
优点:精度高(Anchor机制)
缺点:推理速度慢,训练时间长,误报相对高

