
[UE4]机器人自动寻路
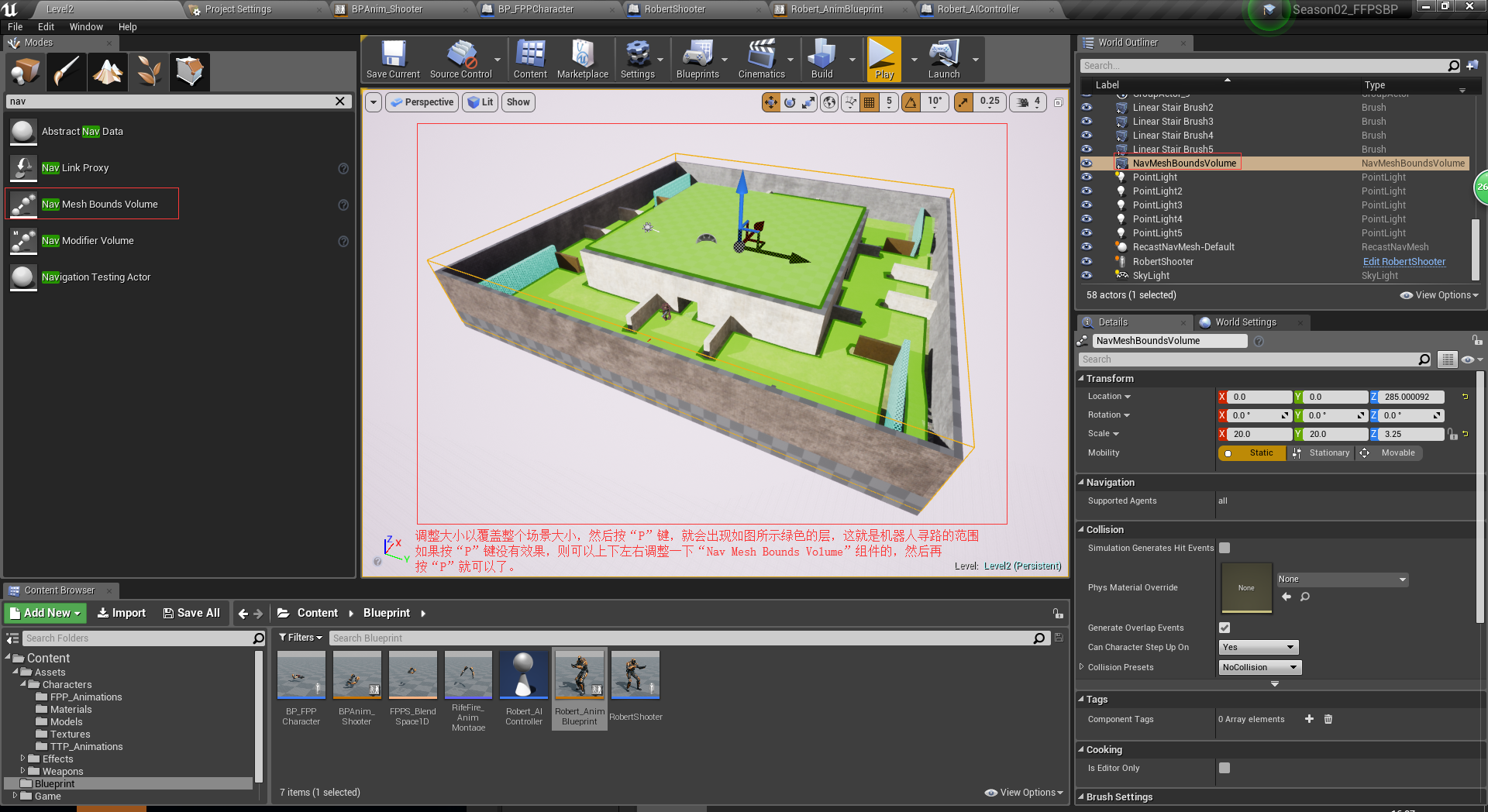
要让机器人能够自动寻路,需要画出自动寻路的范围,可以使用“Nav Mesh Bounds Volume”组件来自定寻路范围
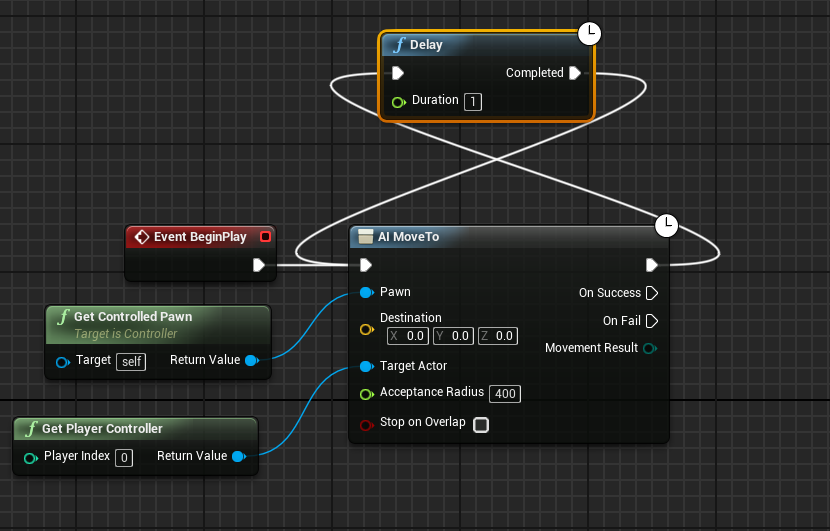
通过“Delay”节点可以实现让AI执行Move To以后停顿1秒,然后继续搜寻并移动到目标,这样就可以实现AI不断搜寻。
如果AI与目标之间有障碍物,AI是会自动绕过障碍物的,这就是“Nav Mesh Bounds Volume”组件起了作用。

要让机器人能够自动寻路,需要画出自动寻路的范围,可以使用“Nav Mesh Bounds Volume”组件来自定寻路范围
通过“Delay”节点可以实现让AI执行Move To以后停顿1秒,然后继续搜寻并移动到目标,这样就可以实现AI不断搜寻。
如果AI与目标之间有障碍物,AI是会自动绕过障碍物的,这就是“Nav Mesh Bounds Volume”组件起了作用。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号