【转】UNITY中相机空间,投影空间的正向问题
原文链接1:https://www.cnblogs.com/wantnon/p/4570188.html
原文链接2:https://www.cnblogs.com/hefee/p/3820610.html
在unity里 相机空间 与 相机gameObject的局部空间 不重合。
Camera.worldToCameraMatrix的文档中有这样一句话:
Note that camera space matches OpenGL convention: camera's forward is the negative Z axis. This is different from Unity's convention, where forward is the positive Z axis.
意思是说unity中相机gameObject的蓝轴是相机空间的-Z。
为了确认,做了如下实验:
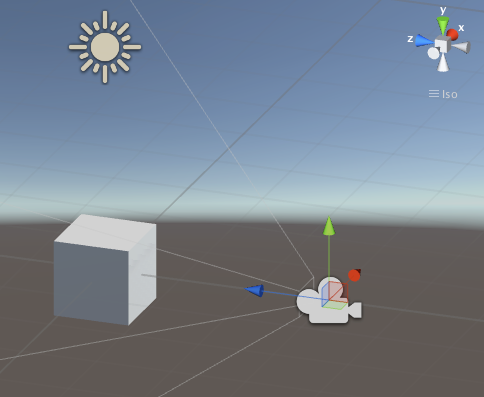
如图,立方体的坐标是(0,0,0),相机的坐标是(0,0,-3),我们要计算并输出立方体在相机空间的坐标。
做法是为立方体添加如下脚本:
using UnityEngine;
using System.Collections;
public class printPosInCameraSpace : MonoBehaviour {
public GameObject m_cameraRef;
// Use this for initialization
void Start () {
Matrix4x4 worldToCameraMat = m_cameraRef.GetComponent<Camera>().worldToCameraMatrix;
Vector3 thisPosInWorld = transform.position;
Vector3 thisPosInCamera = worldToCameraMat.MultiplyPoint (thisPosInWorld);
Debug.Log (thisPosInCamera);
}
}
并在编辑器中将camera赋给m_cameraRef.
然后运行脚本,得到输出结果为:(0,0,-3)。
这说明相机gameObject的蓝轴确实是相机空间-Z轴。
进一步实验:
将脚本改为:
using UnityEngine;
using System.Collections;
public class printPosInCameraGameObjectLocalSpace : MonoBehaviour {
public GameObject m_cameraRef;
// Use this for initialization
void Start () {
Matrix4x4 worldToCameraMat = m_cameraRef.transform.worldToLocalMatrix;
Vector3 thisPosInWorld = transform.position;
Vector3 thisPosInCamera = worldToCameraMat.MultiplyPoint (thisPosInWorld);
Debug.Log (thisPosInCamera);
}
}
输出结果为:(0,0,3)。
--结论:
相机空间 和 相机gameObject的局部空间 是不重合的。 图中这三个坐标轴表示的是 相机gameObject的局部空间。 而 相机空间 则Z轴方向与之相反。
图中这三个坐标轴表示的是 相机gameObject的局部空间。 而 相机空间 则Z轴方向与之相反。
Camera.worldToCameraMatrix是 世界空间to相机空间 矩阵。Camera.transform.worldToLocalMatrix是 世界空间to相机gameObject的局部空间 矩阵,两个矩阵是不一样的。
————————————————————————————————————————————————————————————
透视投影

OpenGL透视视锥体与NDC
在透视投影中,截棱锥体(观察坐标)中的3D点会被映射到立方体(NDC)中。x坐标的范围从[l,f]到[-1,1],y坐标的范围从[b,t]到[-1,1],z坐标的范围从[n,f]到[-1,1]。
注意,观察坐标为右手坐标系,NDC使用左右坐标系。也就是说,位于原点的照相机在观察坐标中看向-Z轴,而在NDC中看向+Z轴。因为glFrustum()只接收正的近平面与远平面距离值,我们需要在构建GL_PROJECTION矩阵时对他们取反。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号