cuda中threadIdx、blockIdx、blockDim和gridDim的使用
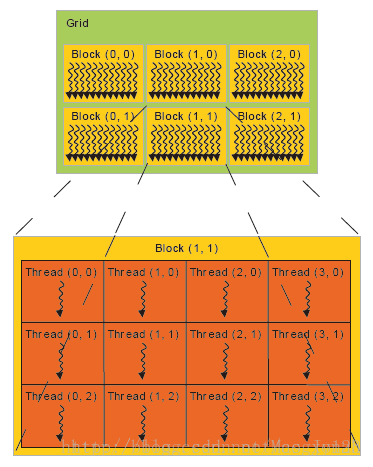
threadIdx是一个uint3类型,表示一个线程的索引。
blockIdx是一个uint3类型,表示一个线程块的索引,一个线程块中通常有多个线程。
blockDim是一个dim3类型,表示线程块的大小。
gridDim是一个dim3类型,表示网格的大小,一个网格中通常有多个线程块。
下面这张图比较清晰的表示的几个概念的关系:
cuda 通过<<< >>>符号来分配索引线程的方式,我知道的一共有15种索引方式。
下面程序展示了这15种索引方式:
#include "cuda_runtime.h" #include "device_launch_parameters.h" #include <stdio.h> #include <stdlib.h> #include <iostream> using namespace std; //thread 1D __global__ void testThread1(int *c, const int *a, const int *b) { int i = threadIdx.x; c[i] = b[i] - a[i]; } //thread 2D __global__ void testThread2(int *c, const int *a, const int *b) { int i = threadIdx.x + threadIdx.y*blockDim.x; c[i] = b[i] - a[i]; } //thread 3D __global__ void testThread3(int *c, const int *a, const int *b) { int i = threadIdx.x + threadIdx.y*blockDim.x + threadIdx.z*blockDim.x*blockDim.y; c[i] = b[i] - a[i]; } //block 1D __global__ void testBlock1(int *c, const int *a, const int *b) { int i = blockIdx.x; c[i] = b[i] - a[i]; } //block 2D __global__ void testBlock2(int *c, const int *a, const int *b) { int i = blockIdx.x + blockIdx.y*gridDim.x; c[i] = b[i] - a[i]; } //block 3D __global__ void testBlock3(int *c, const int *a, const int *b) { int i = blockIdx.x + blockIdx.y*gridDim.x + blockIdx.z*gridDim.x*gridDim.y; c[i] = b[i] - a[i]; } //block-thread 1D-1D __global__ void testBlockThread1(int *c, const int *a, const int *b) { int i = threadIdx.x + blockDim.x*blockIdx.x; c[i] = b[i] - a[i]; } //block-thread 1D-2D __global__ void testBlockThread2(int *c, const int *a, const int *b) { int threadId_2D = threadIdx.x + threadIdx.y*blockDim.x; int i = threadId_2D+ (blockDim.x*blockDim.y)*blockIdx.x; c[i] = b[i] - a[i]; } //block-thread 1D-3D __global__ void testBlockThread3(int *c, const int *a, const int *b) { int threadId_3D = threadIdx.x + threadIdx.y*blockDim.x + threadIdx.z*blockDim.x*blockDim.y; int i = threadId_3D + (blockDim.x*blockDim.y*blockDim.z)*blockIdx.x; c[i] = b[i] - a[i]; } //block-thread 2D-1D __global__ void testBlockThread4(int *c, const int *a, const int *b) { int blockId_2D = blockIdx.x + blockIdx.y*gridDim.x; int i = threadIdx.x + blockDim.x*blockId_2D; c[i] = b[i] - a[i]; } //block-thread 3D-1D __global__ void testBlockThread5(int *c, const int *a, const int *b) { int blockId_3D = blockIdx.x + blockIdx.y*gridDim.x + blockIdx.z*gridDim.x*gridDim.y; int i = threadIdx.x + blockDim.x*blockId_3D; c[i] = b[i] - a[i]; } //block-thread 2D-2D __global__ void testBlockThread6(int *c, const int *a, const int *b) { int threadId_2D = threadIdx.x + threadIdx.y*blockDim.x; int blockId_2D = blockIdx.x + blockIdx.y*gridDim.x; int i = threadId_2D + (blockDim.x*blockDim.y)*blockId_2D; c[i] = b[i] - a[i]; } //block-thread 2D-3D __global__ void testBlockThread7(int *c, const int *a, const int *b) { int threadId_3D = threadIdx.x + threadIdx.y*blockDim.x + threadIdx.z*blockDim.x*blockDim.y; int blockId_2D = blockIdx.x + blockIdx.y*gridDim.x; int i = threadId_3D + (blockDim.x*blockDim.y*blockDim.z)*blockId_2D; c[i] = b[i] - a[i]; } //block-thread 3D-2D __global__ void testBlockThread8(int *c, const int *a, const int *b) { int threadId_2D = threadIdx.x + threadIdx.y*blockDim.x; int blockId_3D = blockIdx.x + blockIdx.y*gridDim.x + blockIdx.z*gridDim.x*gridDim.y; int i = threadId_2D + (blockDim.x*blockDim.y)*blockId_3D; c[i] = b[i] - a[i]; } //block-thread 3D-3D __global__ void testBlockThread9(int *c, const int *a, const int *b) { int threadId_3D = threadIdx.x + threadIdx.y*blockDim.x + threadIdx.z*blockDim.x*blockDim.y; int blockId_3D = blockIdx.x + blockIdx.y*gridDim.x + blockIdx.z*gridDim.x*gridDim.y; int i = threadId_3D + (blockDim.x*blockDim.y*blockDim.z)*blockId_3D; c[i] = b[i] - a[i]; } void addWithCuda(int *c, const int *a, const int *b, unsigned int size) { int *dev_a = 0; int *dev_b = 0; int *dev_c = 0; cudaSetDevice(0); cudaMalloc((void**)&dev_c, size * sizeof(int)); cudaMalloc((void**)&dev_a, size * sizeof(int)); cudaMalloc((void**)&dev_b, size * sizeof(int)); cudaMemcpy(dev_a, a, size * sizeof(int), cudaMemcpyHostToDevice); cudaMemcpy(dev_b, b, size * sizeof(int), cudaMemcpyHostToDevice); //testThread1<<<1, size>>>(dev_c, dev_a, dev_b); //uint3 s;s.x = size/5;s.y = 5;s.z = 1; //testThread2 <<<1,s>>>(dev_c, dev_a, dev_b); //uint3 s; s.x = size / 10; s.y = 5; s.z = 2; //testThread3<<<1, s >>>(dev_c, dev_a, dev_b); //testBlock1<<<size,1 >>>(dev_c, dev_a, dev_b); //uint3 s; s.x = size / 5; s.y = 5; s.z = 1; //testBlock2<<<s, 1 >>>(dev_c, dev_a, dev_b); //uint3 s; s.x = size / 10; s.y = 5; s.z = 2; //testBlock3<<<s, 1 >>>(dev_c, dev_a, dev_b); //testBlockThread1<<<size/10, 10>>>(dev_c, dev_a, dev_b); //uint3 s1; s1.x = size / 100; s1.y = 1; s1.z = 1; //uint3 s2; s2.x = 10; s2.y = 10; s2.z = 1; //testBlockThread2 << <s1, s2 >> >(dev_c, dev_a, dev_b); //uint3 s1; s1.x = size / 100; s1.y = 1; s1.z = 1; //uint3 s2; s2.x = 10; s2.y = 5; s2.z = 2; //testBlockThread3 << <s1, s2 >> >(dev_c, dev_a, dev_b); //uint3 s1; s1.x = 10; s1.y = 10; s1.z = 1; //uint3 s2; s2.x = size / 100; s2.y = 1; s2.z = 1; //testBlockThread4 << <s1, s2 >> >(dev_c, dev_a, dev_b); //uint3 s1; s1.x = 10; s1.y = 5; s1.z = 2; //uint3 s2; s2.x = size / 100; s2.y = 1; s2.z = 1; //testBlockThread5 << <s1, s2 >> >(dev_c, dev_a, dev_b); //uint3 s1; s1.x = size / 100; s1.y = 10; s1.z = 1; //uint3 s2; s2.x = 5; s2.y = 2; s2.z = 1; //testBlockThread6 << <s1, s2 >> >(dev_c, dev_a, dev_b); //uint3 s1; s1.x = size / 100; s1.y = 5; s1.z = 1; //uint3 s2; s2.x = 5; s2.y = 2; s2.z = 2; //testBlockThread7 << <s1, s2 >> >(dev_c, dev_a, dev_b); //uint3 s1; s1.x = 5; s1.y = 2; s1.z = 2; //uint3 s2; s2.x = size / 100; s2.y = 5; s2.z = 1; //testBlockThread8 <<<s1, s2 >>>(dev_c, dev_a, dev_b); uint3 s1; s1.x = 5; s1.y = 2; s1.z = 2; uint3 s2; s2.x = size / 200; s2.y = 5; s2.z = 2; testBlockThread9<<<s1, s2 >>>(dev_c, dev_a, dev_b); cudaMemcpy(c, dev_c, size*sizeof(int), cudaMemcpyDeviceToHost); cudaFree(dev_a); cudaFree(dev_b); cudaFree(dev_c); cudaGetLastError(); } int main() { const int n = 1000; int *a = new int[n]; int *b = new int[n]; int *c = new int[n]; int *cc = new int[n]; for (int i = 0; i < n; i++) { a[i] = rand() % 100; b[i] = rand() % 100; c[i] = b[i] - a[i]; } addWithCuda(cc, a, b, n); FILE *fp = fopen("out.txt", "w"); for (int i = 0; i < n; i++) fprintf(fp, "%d %d\n", c[i], cc[i]); fclose(fp); bool flag = true; for (int i = 0; i < n; i++) { if (c[i] != cc[i]) { flag = false; break; } } if (flag == false) printf("no pass"); else printf("pass"); cudaDeviceReset(); delete[] a; delete[] b; delete[] c; delete[] cc; getchar(); return 0; }
这里只保留了3D-3D方式,注释了其余14种方式,所有索引方式均测试通过。
还是能看出一些规律的:)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号