matlab练习程序(LQR路径跟踪)
LQR 是一种优化控制方法,设计目标是找到一组控制输入,使得线性系统的状态轨迹尽可能地接近目标,同时使控制输入尽可能小。其目标函数是一个二次型成本函数。
分为以下几个步骤:
1. 设系统动态方程为:
![]()
其中x为状态量,u为控制输入,A和B为状态转移和控制矩阵。
2. 定义一个性能指标,即控制器的优化目标。在LQR中,通常采用二次型性能指标,即系统状态和控制输入的加权和的二次型。这个性能指标可以包括状态的偏差、控制输入的幅值等,可以根据具体需求进行调整:
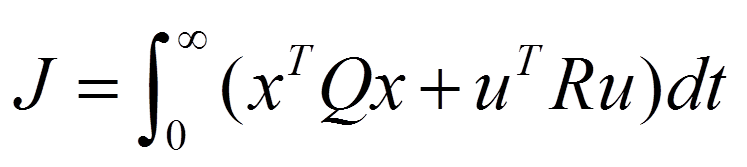
其中,Q和R是权重矩阵,用于调整状态偏差和控制输入的相对重要性。
3. 设计LQR控制器,通过解离散时间的Riccati方程,可以获得最优的状态反馈控制器。这个控制器以状态为输入,根据系统的状态信息来生成控制输入,以最小化性能指标。
方程如下:
![]()
解该方程可以参考之前的文章。
4. 最后得到最优控制器公式如下:
![]()
其中K为状态反馈矩阵,根据当前系统状态可以得到最终控制量u=-Kx。
matlab代码如下:
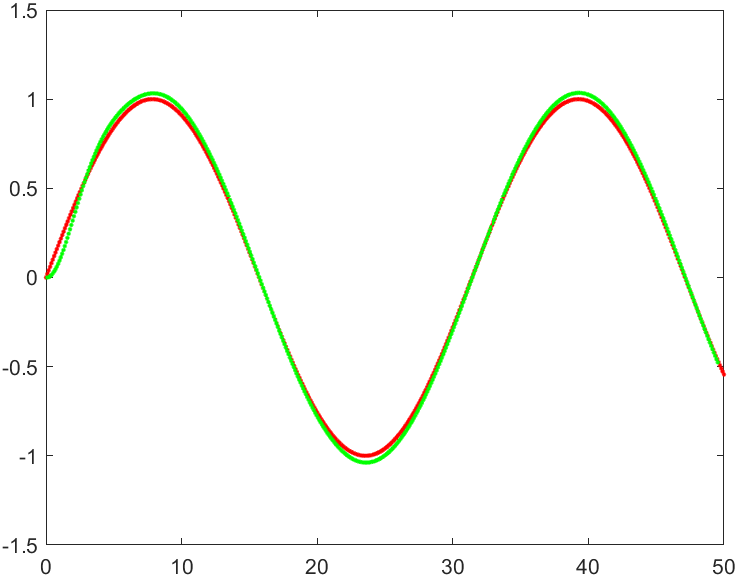
clear all;close all;clc; v =1; lambda = 2; dt = 0.1; L=2.5; x = 0:0.1:50; y = sin(x/5); path = [x' y']; for i=2:length(path) dx = path(i,1)-path(i-1,1); dy = path(i,2)-path(i-1,2); path(i-1,3) = atan2(dy,dx); end path(length(path),3) = path(length(path)-1,3); plot(path(:,1),path(:,2),'r.'); hold on; curp=[0 0 0]; for i=1:length(path) d = path(:,1:2) - curp(1:2); dis = d(:,1).^2 + d(:,2).^2; [~,ind] = min(dis); %找路径最近点索引 dx = curp(1) - path(ind,1); dy = curp(2) - path(ind,2); dyaw = curp(3) - path(ind,3); xstate = [dx;dy;sin(dyaw)]; %状态变量 Ad=[1 0 -v*sin(path(ind,3))*dt; 0 1 v*cos(path(ind,3))*dt; 0 0 1]; %线性离散后的系统矩阵 Bd=[cos(path(ind,3))*dt 0; sin(path(ind,3))*dt 0; 0 dt]; %线性离散后的控制矩阵 Q = [10 0 0; 0 10 0; 0 0 1]; %初始化LQR的权重矩阵 R =[1 0; 0 1]; %初始化LQR的权重矩阵 %*********黎卡提方程求解**********% PN =Q; err =1e-5; error = 1; k=1; while(error>err) PN_1 = Q + Ad'*PN*Ad - Ad'*PN*Bd*inv(R+Bd'*PN*Bd)*(Bd'*PN*Ad); error = norm(PN-PN_1); PN = PN_1; k = k+1; if k>400 break; end end P =PN_1; K = (R+Bd'*P*Bd)\Bd'*P*Ad; %计算状态反馈增益K %***************************************% U = - K * xstate; %线性反馈控制量 deltav = U(1); deltastr = U(2); curp(1) = curp(1) + dt*v*cos(curp(3)); curp(2) = curp(2) + dt*v*sin(curp(3)); curp(3) = curp(3) + dt*v*tan(deltastr)/L; plot(curp(1),curp(2),'g.'); end %axis equal;
结果如下: