
matlab练习程序(Pure Pursuit路径跟踪)
当时写stanley就实现了,贴上来记录一下。
方法示意图:

控制率公式:
其中L为轴距,e为横向误差,v为车辆速度,lambda和c为控制参数。
算法步骤如下:
1. 根据当前定位结果找到路径最邻近点。
2. 计算该点与定位结果横向误差e。
3. 根据控制率公式计算出前轮转角。
4. 将前轮转角转化为航向角,带入运动模型计算出下一时刻的位姿。
matlab代码如下:
clear all;close all;clc; v = 1; dt = 0.1; L=2.5; lambda = 1; c = 1; curp=[0 0 0]; x = 0:0.1:50; y = sin(x/5); path = [x' y']; for i=2:length(path) dx = path(i,1)-path(i-1,1); dy = path(i,2)-path(i-1,2); path(i-1,3) = atan2(dy,dx); end path(length(path),3) = path(length(path)-1,3); plot(path(:,1),path(:,2),'r.'); hold on; for i=1:length(path) d = path(:,1:2) - curp(1:2); dis = d(:,1).^2 + d(:,2).^2; [~,ind] = min(dis); %找路径最近点索引 ind = ind + 20; %预瞄点 if ind >=length(path) ind = length(path); end R = [cos(curp(3)) -sin(curp(3)) curp(1); sin(curp(3)) cos(curp(3)) curp(2); 0 0 1]; e = inv(R)*[path(ind,1);path(ind,2);1.0]; ey = e(2); %横向偏差 u = atan2(2*L*ey,(lambda*v+c)^2); %期望前轮转角 curp(1) = curp(1) + dt*v*cos(curp(3)); curp(2) = curp(2) + dt*v*sin(curp(3)); curp(3) = curp(3) + dt*v*tan(u)/L; plot(curp(1),curp(2),'g.'); end
结果如下:
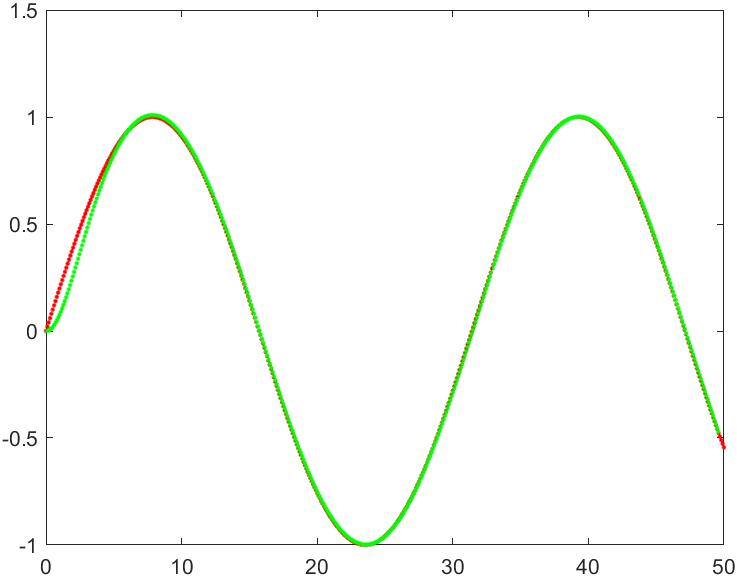
绿色为跟踪路径,红色为已知路径。
参考:

