
matlab练习程序(Bundle Adjustment)
BA作为视觉SLAM中后端优化的一个核心点还是比较重要的。
BA根据优化量的不同可以分为三种形式。
Full BA:观测点和位姿同时优化,一般是视觉SLAM后端的核心。
Motion BA:已知观测点,优化位姿,一般用来定位。之前的文章中有用到BA单做位姿计算的方法。
Struct BA:已知位姿,优化观测点,一般用来建图。
不论是哪种BA方法,一般模型和残差都是一样的,不一样的都是待优化参数和雅克比矩阵。
下面优化同样用到了李群李代数的方法,雅克比矩阵参考了之前的两篇文章([1],[2])。
下面代码流程大致分三步:
1. 设置100个随机三维点,再设置两组位姿。 然后对位姿和随机点加上一些扰动,送入循环。
2. 确定优化四大步:模型,残差,待优化参数和雅克比矩阵。
3. 迭代优化出结果。
matlab代码如下:
clear all;close all;clc; warning off; p = [rand(100,3)*100 ones(100,1)]'; R = rot(0,90,0); R1 = rot(-0.5,89.4,-1.0); R2 = rot(0.5,90.5,1); T = [200;40;50]; pos1 = [R1 T+5*rand(3,1);0 0 0 1] pos2 = [R2 T+5*rand(3,1);0 0 0 1] newp1 = inv(pos1)*p; newp2 = inv(pos2)*p; uv1 =[newp1(1,:)./newp1(3,:) ; newp1(2,:)./newp1(3,:)]; uv2 =[newp2(1,:)./newp2(3,:) ; newp2(2,:)./newp2(3,:)]; initPos = [R T;0 0 0 1] x = zeros(2*6+3*100,1); x(1:6) = SE3_to_se3(inv(initPos))'; x(7:12) = SE3_to_se3(inv(initPos))'; x(13:end) = reshape(p(1:3,:),[300,1]) + rand(300,1); for i=1:100 J = calcJab(x); fx = calcCost(x,uv1,uv2); % norm(fx) H = J'*J; dx = inv(H + 0.01*eye(size(H)))*J'*fx; x1 = SE3_to_se3(se3_to_SE3(dx(1:6)')*se3_to_SE3(x(1:6)')); x2 = SE3_to_se3(se3_to_SE3(dx(7:12)')*se3_to_SE3(x(7:12)')); x = x + dx; x(1:6) = x1'; x(7:12) = x2'; end norm(fx) %show result plot(uv1(1,:),uv1(2,:),'ro'); hold on; plot(uv2(1,:),uv2(2,:),'go'); pos1 = se3_to_SE3(x(1:6)'); pos2 = se3_to_SE3(x(7:12)'); P = [reshape(x(13:end),[3,100]);ones(1,100)]; p1 = pos1 * P; p2 = pos2 * P; uv1 =[p1(1,:)./p1(3,:) ; p1(2,:)./p1(3,:)]; uv2 =[p2(1,:)./p2(3,:) ; p2(2,:)./p2(3,:)]; plot(uv1(1,:),uv1(2,:),'r*'); hold on; plot(uv2(1,:),uv2(2,:),'g*'); inv(pos1) inv(pos2) figure; spy(H) function J = calcJab(x) newP = x(13:end); newP = reshape(newP,[3,100]); newP = [newP;ones(1,100)]; pos1 = se3_to_SE3(x(1:6)'); pos2 = se3_to_SE3(x(7:12)'); P1 = pos1 * newP; P2 = pos2 * newP; J = zeros(400,6*2+100*3); for i=1:100 X = P1(1,i); Y = P1(2,i); Z = P1(3,i); Jabep = [1/Z 0 -X/(Z*Z);0 1/Z -Y/(Z*Z)]; Jab = zeros(3,6); Jab(1:3,1:3) = eye(3,3); Jab(1:3,4:6) = -[0 -Z Y;Z 0 -X;-Y X 0]; J((i-1)*2+1:i*2,1:6) = Jabep*Jab; J((i-1)*2+1:i*2,12+(i-1)*3+1:12+i*3) = Jabep*pos1(1:3,1:3); end for i=1:100 X = P2(1,i); Y = P2(2,i); Z = P2(3,i); Jabep = [1/Z 0 -X/(Z*Z);0 1/Z -Y/(Z*Z)]; Jab = zeros(3,6); Jab(1:3,1:3) = eye(3,3); Jab(1:3,4:6) = -[0 -Z Y;Z 0 -X;-Y X 0]; J(200+(i-1)*2+1:200+i*2,7:12) = Jabep*Jab; J(200+(i-1)*2+1:200+i*2,12+(i-1)*3+1:12+i*3) = Jabep*pos2(1:3,1:3); end end function fx = calcCost(x,uv1,uv2) newP = x(13:end); newP = reshape(newP,[3,100]); newP = [newP;ones(1,100)]; pos1 = se3_to_SE3(x(1:6)'); pos2 = se3_to_SE3(x(7:12)'); P1 = pos1 * newP; P2 = pos2 * newP; fx = zeros(400,1); for i=1:100 X = P1(1,i); Y = P1(2,i); Z = P1(3,i); u = uv1(1,i); v = uv1(2,i); fx((i-1)*2+1:i*2) = [u - X/Z;v - Y/Z]; end for i=1:100 X = P2(1,i); Y = P2(2,i); Z = P2(3,i); u = uv2(1,i); v = uv2(2,i); fx(200+(i-1)*2+1:200+i*2) = [u - X/Z;v - Y/Z]; end end function R=rot(i,j,k) Rx=[1 0 0;0 cos(i) -sin(i); 0 sin(i) cos(i)]; Ry=[cos(j) 0 sin(j);0 1 0;-sin(j) 0 cos(j)]; Rz=[cos(k) -sin(k) 0;sin(k) cos(k) 0;0 0 1]; R=Rz*Ry*Rx; end function se3 = SE3_to_se3( SE3 ) R=SE3(1:3,1:3); theta=acos((trace(R)-1)/2); lnR=(theta/(2*sin(theta)))*(R-R'); w=[-lnR(2,3) lnR(1,3) -lnR(1,2)]; wx=[0 -w(3) w(2);w(3) 0 -w(1);-w(2) w(1) 0]; if(theta==0) Vin=eye(3); else A=sin(theta)/theta; B=(1-cos(theta))/(theta^2); Vin=eye(3)-(1/2)*wx+(1/(theta^2))*(1-(A/(2*B)))*(wx*wx); end u=Vin*SE3(1:3,4); se3=[u' w]; end function SE3 = se3_to_SE3( se3 ) w=se3(4:6)'; u=se3(1:3)'; wx=[0 -w(3) w(2);w(3) 0 -w(1);-w(2) w(1) 0]; theta=sqrt(w'*w); if(theta~=0) A=sin(theta)/theta; B=(1-cos(theta))/(theta^2); C=(1-A)/(theta^2); else A=0; B=0; C=0; end R=eye(3)+(A*wx)+(B*(wx*wx)); V=eye(3)+B*wx+C*(wx*wx); Vp=V*u; SE3=zeros(4); SE3(1:3,1:3)=R; SE3(1:3,4)=Vp; SE3(4,4)=1; end
结果如下:
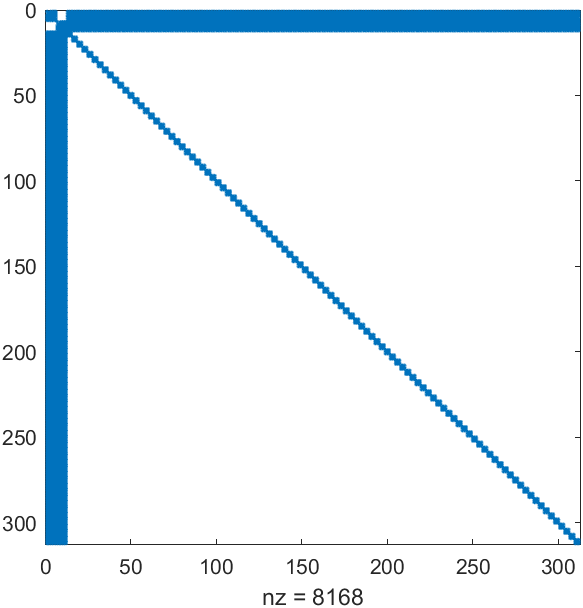
经典的箭头矩阵:
用优化后位姿将优化后的点云反投影到归一化图像坐标系结果:
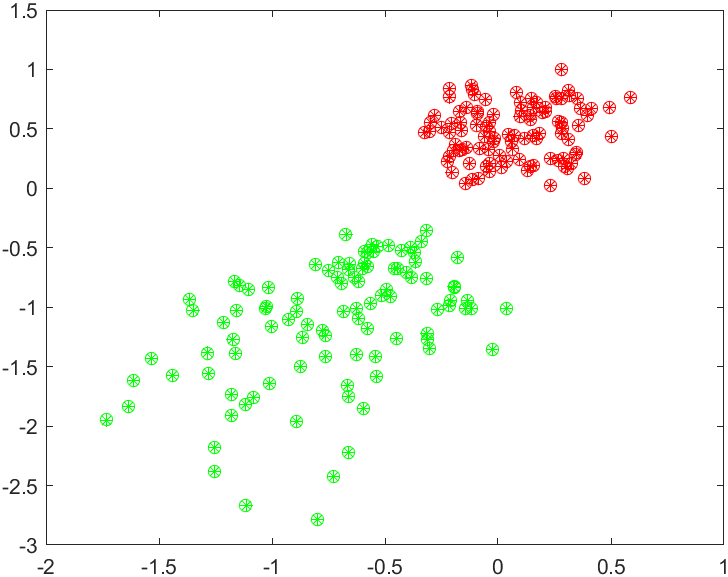
圈圈是真值,星星是结果。

