matlab练习程序(连续系统辨识与响应)
在不知道系统模型的情况下,如果想要使用模型的方法控制系统,可以先用系统辨识求得系统的状态空间参数,然后设计控制器。
下面根据已知状态参数设计了一个系统,再利用控制量得到系统响应。
然后结合控制量和系统响应,利用matlab自带的子空间迭代方法辨识得到系统的状态方程。
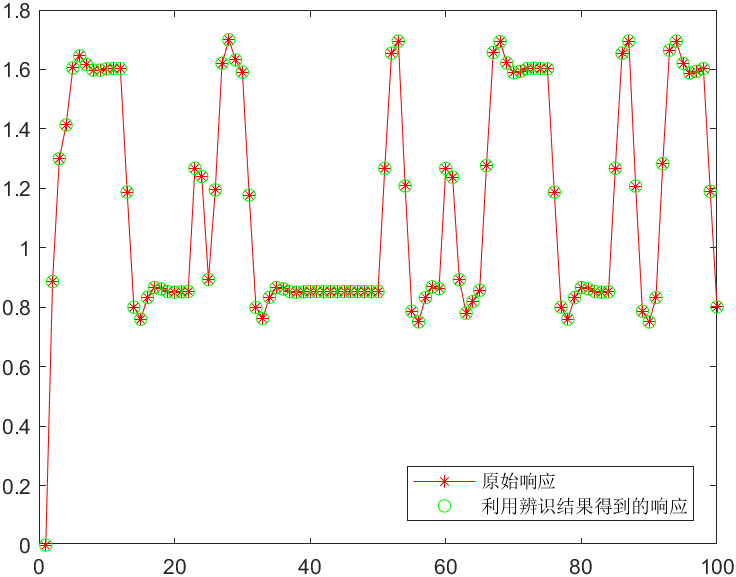
再比较一下原始响应和辨识结果响应。
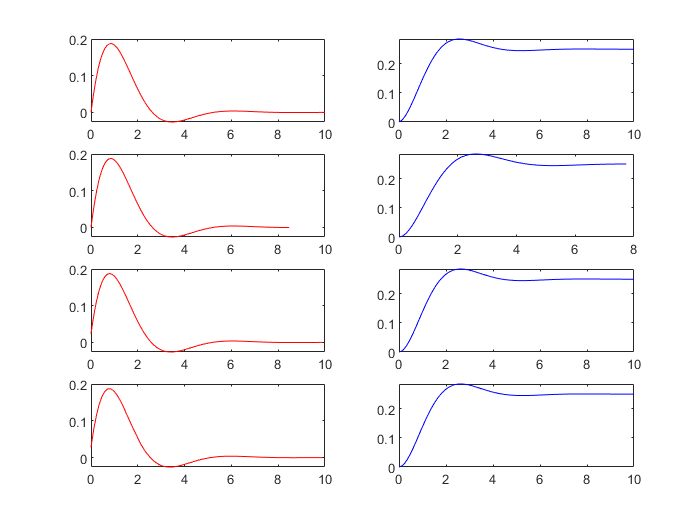
又比较了不同方法下的系统的冲击与阶跃响应。
matlab代码如下:
clear all;close all;clc; load dryer2 warning off; %%%%%%%%%%%%%%%%%%%%%%%%%%%%连续系统的系统辨识%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% A = [-1.5,-2;1,0]; B = [0.5;0]; C = [0,1]; D = 0; sys = ss(A,B,C,D); %状态方程 sys_tf = tf(sys); %传递函数 u = u2(1:100); %控制量 y = lsim(sys,u,(1:100)'); %响应 idata = iddata(y,u); %构造辨识结构体 idsys = n4sid(idata,2,'Ts',0,'Form','canonical'); %系统辨识得到状态方程(连续) idsys_tf = idtf(idsys); %构造新的传递函数 y2 = lsim(idsys,u,(1:100)'); %用原始控制量控制已辨识的系统生成响应 plot(y,'r-*'); hold on; plot(y2,'go'); legend('原始响应','利用辨识结果得到的响应'); %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%状态空间转传递函数%%%%%%%%%%%%%%%%%%%%%%%%%%%% syms s; Gc = sys.C*inv(s*eye(2) - sys.A)*sys.B+sys.D sys_tf %%%%%%%%%%%%对传递函数计算反拉普拉斯变换并和原系统比较冲击和阶跃响应%%%%%%%%%% y = ilaplace(Gc); evaly = @(t) vpa(eval(y),10); figure; u=0:0.1:10; imp = double(evaly(u)); subplot(4,2,1); plot(u,imp,'r'); subplot(4,2,2); ste = cumsum(imp)/10.0; plot(u,ste,'b'); subplot(4,2,3); [r,t] = impulse(sys); plot(t,r,'r') subplot(4,2,4); [r,t] = step(sys); plot(t,r,'b'); %%%%%%%%%%%%%%利用符号方法解上述系统的微分方程并求阶跃和冲击响应%%%%%%%%%%%%%% y = dsolve('D2y+1.5*Dy+2*y=0.5','Dy(0)=0','y(0)=0','x'); evaly = @(x) vpa(eval(y),10); x=0:0.1:10; imp = double(evaly(x)); subplot(4,2,5); plot(x(1:end-1),diff(imp)./diff(x),'r'); subplot(4,2,6); plot(x,imp,'b'); %%%%%%%%%%%%%%%%%%利用数值方法解上述微分方程并求阶跃和冲击响应%%%%%%%%%%%%%%%% [x,y] = ode45(@func,[0 10],[0; 0]); subplot(4,2,7); plot(x(1:end-1),diff(y(:,2))./diff(x),'r') subplot(4,2,8); plot(x,y(:,2),'b') function dy = func(x,y) dy = [y(2); 0.5*x-1.5*y(2)-2*y(1)]; end
结果如下:
用原控制量与辨识结果生成响应:
不同方法下得到的冲击与阶跃响应:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号