matlab练习程序(点云下采样)
点云处理有时因为数据量太大,我们需要对其进行下采样。
这里的方法是先将点云填入固定大小的三维网格中,然后每个网格中选一个点生成新的点云。
新点云即为下采样后的点云。
这里使用斯坦福兔子作为测试点云。
小兔子pcd下载地址。
原始点云:
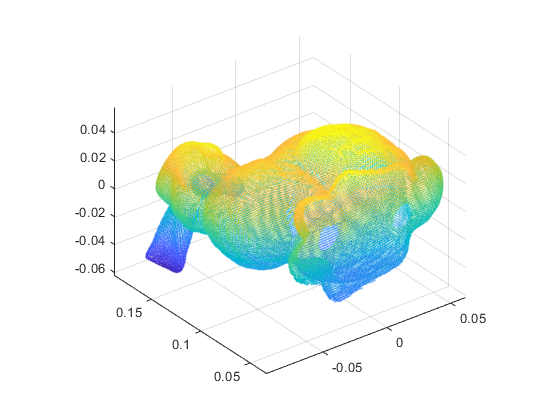
采样后点云:

matlab代码如下:
clear all; close all; clc; pc = pcread('rabbit.pcd'); pcshow(pc); pc_point = pc.Location; xlimit = pc.XLimits; ylimit = pc.YLimits; zlimit = pc.ZLimits; cellsize = 0.005; %定义网格大小 %设置网格数量 W = floor((xlimit(2) - xlimit(1))/cellsize)+1; H = floor((ylimit(2) - ylimit(1))/cellsize)+1; D = floor((zlimit(2) - zlimit(1))/cellsize)+1; %向网格里填数 voxel = cell(W,H,D); for i =1:length(pc_point) I = floor((pc_point(i,1)-xlimit(1))/cellsize)+1; J = floor((pc_point(i,2)-ylimit(1))/cellsize)+1; K = floor((pc_point(i,3)-zlimit(1))/cellsize)+1; voxel{I,J,K} = [voxel{I,J,K};pc_point(i,:)]; end %以网格中第一个点对原点云进行下采样 pointre =[]; for i=1:W for j=1:H for k=1:D if isempty(voxel{i,j,k})==0 pointre=[pointre;voxel{i,j,k}(1,:)]; end end end end pcre = pointCloud(pointre); figure; pcshow(pcre);

 浙公网安备 33010602011771号
浙公网安备 33010602011771号