
matlab练习程序(立体相关块匹配)
立体感知对应点匹配基本分为两种:一是低层的基于像素级的匹配,二是高层的基于特征级的匹配。
这里介绍的是底层的像素级匹配。
用摄像头平行移动获取两张图片,其实就是双目感知到的两张图片。
原理是在一定的窗口中,两张图片具有相同的水平视差,而对比这两个局部窗口中的像素相似度就能计算出当前像素的深度。
先看下效果吧:
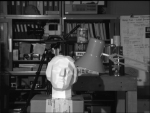

left.img right.img

depth.img
具体判断像素相似度的判据有以下几种:
所有公式(非官方公式哈,自己凭理解写的)中ds是原图中的像素块(左图),dd是待检测图的像素块(右图),i是要搜寻深度的距离。
当然,左右都是相互的,颠倒过来比较是一样的。
1.Sum of Absolute Differencse(sad)公式如下:

2.Root Mean Squared Error(rms)公式如下:

3.Sum of Squared Differences(ssd)公式如下:
4.Normalized Cross Correlation(ncc)公式如下: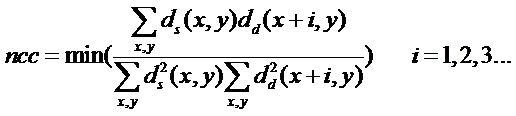
5.Sum of Hamming Distances(shd)公式如下:

公式5中的bit()的含义是像素转为二进制后含有多少个1,整个公式意思就是两张局部图先异或一下,然后统计所有像素二进制化后1的个数,取最少的那个就行了。
我只用matlab实现了第一个公式,其他的都是类似的。
代码如下:
clear all; close all; clc; left=double(imread('left.jpg')); right=double(imread('right.jpg')); [m n]=size(left); w=3; %模板半径 depth=5; %最大偏移距离,同样也是最大深度距离 imgn=zeros(m,n); for i=1+w:m-w for j=1+w+depth:n-w tmp=[]; lwin=left(i-w:i+w,j-w:j+w); for k=0:-1:-depth rwin=right(i-w:i+w,j-w+k:j+w+k); diff=lwin-rwin; tmp=[tmp sum(abs(diff(:)))]; end [junk imgn(i,j)]=min(tmp); %获得最小位置的索引 end end imshow(imgn,[])
之所以没有全部实现是因为所有版本的实现在这个老外的博客(需FQ)里都能找到,我就不多此一举了。

