

FPN特征金字塔
FPN特征金字塔
论文地址 https://arxiv.org/pdf/1612.03144.pdf
目标的多尺度一直是目标检测算法极为棘手的问题。像Fast R-CNN,YOLO这些只是利用深层网络进行检测的算法,是很难把小目标物体检测好的。因为小目标物体本身的像素就比较少,随着降采样的累积,它的特征更容易被丢失。为了解决多尺度检测的问题,传统的方法是使用图像金字塔进行数据扩充。虽然图像金字塔可以一定程度解决小尺度目标检测的问题,但是它最大的问题是带来计算量的极大的增加,而且还有很多冗余的计算。
低层的特征语义信息比较少,但是目标位置准确;高层的特征语义信息比较丰富,但是目标位置比较粗略。利用浅层的特征就可以将简单的目标的区分开来;利用深层的特征可以将复杂的目标区分开来
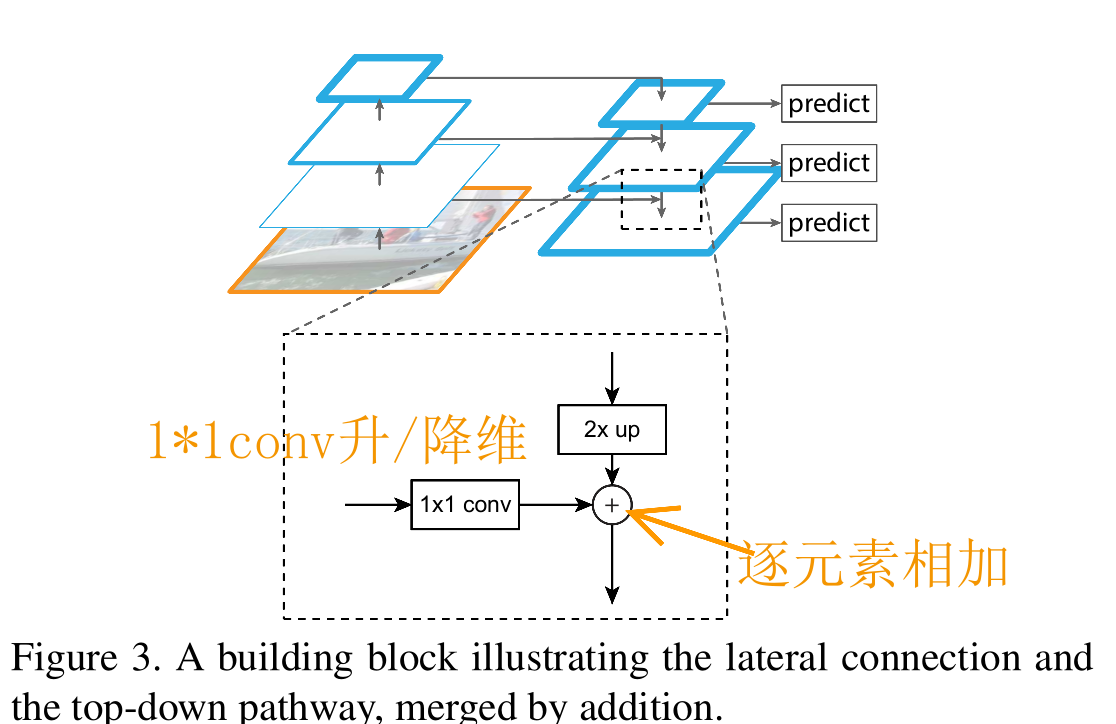
提出了 FPN 结构如下图:这个金字塔结构包括一个自底向上的线路,一个自顶向下的线路和横向连接(lateral connections)。
背景知识
在FPN之前,目标检测不同的卷积结构类型

图(a)特征图像金字塔,它通过将输入图像缩放到不同尺度的大小构成了图像金字塔。然后将这些不同尺度的特征输入到网络中(可以共享参数也可以独立参数),得到每个尺度的检测结果,然后通过NMS等后处理手段进行预测结果的处理。
-
对每一种尺度的图像进行特征提取,能够产生多尺度的特征表示,并且所有等级的特征图都具有较强的语义信息。
-
推理时间大幅度增加;
-
内存占用巨大,端到端训练比较麻烦
图(b)利用单个高层特征图进行预测。浅层的网络更关注于细节和位置信息,高层的网络更关注于语义信息,而高层的语义信息能够帮助我们准确的检测出目标,因此我们可以利用最后一个卷积层上的feature map来进行预测。
- 是Fast R-CNN ,Faster R-CNN,YOLO等算法的网络结构,它只使用卷积网络的最后一层作为输出层。
- 主要问题就是对小尺寸的目标检测效果非常不理想。因为小尺寸目标的特征会随着逐层的降采样快速损失,到最后一层已经有很少的特征支持小目标的精准检测。
图(c)同时利用低层特征和高层特征,分别在不同的层同时进行预测
-
对于简单目标,我们视同低层特征,对于复杂目标,我们利用复杂特征。
-
是SSD采用的结构,它首先提出了使用不同层的Feature Map进行检测的思想。对于简单的目标我们仅仅需要浅层的特征就可以检测到它,对于复杂的目标我们就需要利用复杂的特征来检测它。
-
SSD只是单纯的从每一层导出一个预测结果,没有进行特征融合。
-
没有特征融合和特征复用,没有给高层特征赋予浅层特征擅长检测小目标的能力,也没有给浅层的特征赋予高层捕捉到的语义信息,提升结果有限。
图(d)(FPN网络)
首先我们在输入的图像上进行深度卷积,然后对Layer2上面的特征进行降维操作(即添加一层1x1的卷积层),对Layer4上面的特征就行上采样操作,使得它们具有相应的尺寸,然后对处理后的Layer2和处理后的Layer4执行加法操作(对应元素相加),将获得的结果输入到Layer5中去。其背后的思路是为了获得一个强语义信息,这样可以提高检测性能。其实看下面的代码就可以明白,把卷积之后的{Ck}层和上采样之后的{Pk}层进行相加,目的是把低层次高分辨率的信息和高层次强语义的信息结合起来,提高检测性能和小目标识别。
FPN网络结构

通过 ResNet50 网络,通过自底向上路径,FPN得到了四组Feature Map,最后利用 C2,C3,C4,C5 建立特征图金字塔结构:
为了将这四组倾向不同特征的Feature Map组合起来,FPN使用了自顶向下及横向连接的策略,最终得到P2,P3,P4,P5四个输出。
1、将 C5 经过 256 个 1x1 的卷积核操作得到:32x32x256,记为 P5;
2、将 P5 进行步长为 2 的上采样得到 64x64x256,再与 C4 经过的 256 个 1x1 卷积核操作得到的结果相加,得到 64x64x256,记为 P4;
3、将 P4 进行步长为 2 的上采样得到 128x128x256,再与 C3 经过的 256 个 1x1 卷积核操作得到的结果相加,得到 128x128x256,记为 P3;
4、将 P3 进行步长为 2 的上采样得到 256x256x256,再与 C2 经过的 256 个 1x1 卷积核操作得到的结果相加,得到 256x256x256,记为 P2;
结合从 P2 到 P5 特征图的大小,如果原图大小 1024x1024, 那各个特征图对应到原图的步长依次为 [P2,P3,P4,P5,P6]=>[4,8,16,32]。
5、FPN 在 P2,P3,P4,P5 之后均接了一个 3×3 卷积操作,该卷积操作是为了减轻上采样的混叠效应(aliasing effect)。
FPN结构特点
自下而上: 最左侧为backbone,默认使用ResNet结构,每一级往上用 step=2 的降采样
自上而下: 首先对C5进行1×1卷积降低通道数得到P5,然后依次进行上采样(最近邻插值)得到P4、P3和P2,目的是得到与C4、C3与C2长宽相同的特征,以便进行逐元素相加。
横向连接: 将上采样后的高语义特征与浅层的定位细节特征进行融合,采用1×1卷积使其通道数变为256,解决维度不一致问题, 然后元素相加。
卷积融合: 在得到相加后的特征后,利用3×3卷积对生成的P2至P4再进行融合,目的是消除上采样过程带来的重叠效应,以生成最终的特征图。
结构总结
FPN是最早在目标检测方向上提出特征融合的算法,开辟了特征融合的先河,为之后PANet,NAS-FPN等算法的提出打下了基础。
FPN是一个特征金字塔的结构。FPN的这种特征金字塔的结构是非常符合CNN的结构特征的,通过将深层语义信息和浅层纹理信息进行融合,为每一层的Feature Map都赋予了更强的捕捉语义信息的能力。
FPN能够很好地处理小目标的主要原因是:
- FPN可以利用经过top-down模型后的那些上下文信息(高层语义信息);
- 对于小目标而言,FPN增加了特征映射的分辨率(即在更大的feature map上面进行操作,这样可以获得更多关于小目标的有用信息)
代码实现
lass FPN(nn.Module):
def __init__(self, block, layers):
super(FPN, self).__init__()
self.inplanes = 64
self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3, bias=False)
self.bn1 = nn.BatchNorm2d(64)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
# Bottom-up layers
self.layer1 = self._make_layer(block, 64, layers[0])
self.layer2 = self._make_layer(block, 128, layers[1], stride=2)
self.layer3 = self._make_layer(block, 256, layers[2], stride=2)
self.layer4 = self._make_layer(block, 512, layers[3], stride=2)
# Top layer
self.toplayer = nn.Conv2d(2048, 256, kernel_size=1, stride=1, padding=0) # Reduce channels
# Smooth layers
self.smooth1 = nn.Conv2d(256, 256, kernel_size=3, stride=1, padding=1)
self.smooth2 = nn.Conv2d(256, 256, kernel_size=3, stride=1, padding=1)
self.smooth3 = nn.Conv2d(256, 256, kernel_size=3, stride=1, padding=1)
# Lateral layers
self.latlayer1 = nn.Conv2d(1024, 256, kernel_size=1, stride=1, padding=0)
self.latlayer2 = nn.Conv2d( 512, 256, kernel_size=1, stride=1, padding=0)
self.latlayer3 = nn.Conv2d( 256, 256, kernel_size=1, stride=1, padding=0)
for m in self.modules():
if isinstance(m, nn.Conv2d):
n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels
m.weight.data.normal_(0, math.sqrt(2. / n))
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
def _make_layer(self, block, planes, blocks, stride=1):
downsample = None
if stride != 1 or self.inplanes != block.expansion * planes:
downsample = nn.Sequential(
nn.Conv2d(self.inplanes, block.expansion * planes, kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(block.expansion * planes)
)
layers = []
layers.append(block(self.inplanes, planes, stride, downsample))
self.inplanes = planes * block.expansion
for i in range(1, blocks):
layers.append(block(self.inplanes, planes))
return nn.Sequential(*layers)
def _upsample_add(self, x, y):
_,_,H,W = y.size()
return F.upsample(x, size=(H,W), mode='bilinear') + y
def forward(self, x):
# Bottom-up
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
c1 = self.maxpool(x)
c2 = self.layer1(c1)
c3 = self.layer2(c2)
c4 = self.layer3(c3)
c5 = self.layer4(c4)
# Top-down
p5 = self.toplayer(c5)
p4 = self._upsample_add(p5, self.latlayer1(c4))
p3 = self._upsample_add(p4, self.latlayer2(c3))
p2 = self._upsample_add(p3, self.latlayer3(c2))
# Smooth
p4 = self.smooth1(p4)
p3 = self.smooth2(p3)
p2 = self.smooth3(p2)
return p2, p3, p4, p5
参考资料
https://zhuanlan.zhihu.com/p/460738972 详细


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 阿里最新开源QwQ-32B,效果媲美deepseek-r1满血版,部署成本又又又降低了!
· AI编程工具终极对决:字节Trae VS Cursor,谁才是开发者新宠?
· 开源Multi-agent AI智能体框架aevatar.ai,欢迎大家贡献代码
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!