IoU,GIoU,DIoU,CloU损失函数
IoU,GIoU,DIoU,CloU损失函数
图例介绍
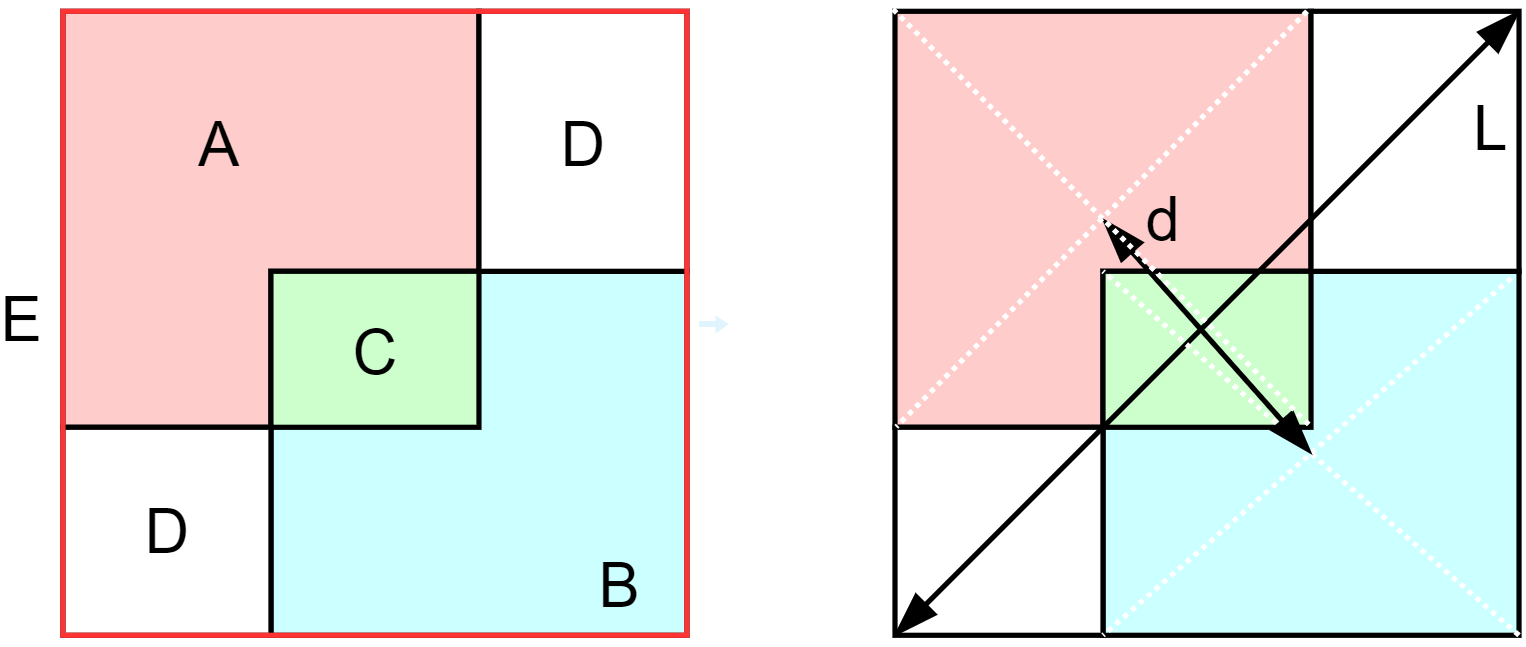
A: 目标框覆盖的矩形面积(粉色区域表示,包含被C掩盖掉的区域)
B: 预测框覆盖的矩形面积(蓝色区域表示,包含被C掩盖掉的区域)
C: A和B重叠部分的矩形面积(C是A和B的交集)
D: 图1中两块白色区域面积之和(A和B最小外接矩形的面积 减去 A和B的并集面积)
E: A和B最小外接矩形的面积(图1的总面积,E=A+B-C+D)
d: A中心点到B中心点的欧式距离
L: A和B最小外接矩形的对角线距离
IoU Loss 交并比
IoU就是我们所说的交并比,是目标检测中最常用的指标,在anchor-based的方法中,他的作用不仅用来确定正样本和负样本,还可以用来评价输出框(predict box)和ground-truth的距离。
numpy实现
单维度box实现
def IoU(box1, box2):
b1_x1, b1_y1, b1_x2, b1_y2 = box1
b2_x1, b2_y1, b2_x2, b2_y2 = box2
xx1 = np.maximum(b1_x1, b2_x1)
yy1 = np.maximum(b1_y1, b2_y1)
xx2 = np.minimum(b1_x2, b2_x2)
yy2 = np.minimum(b1_y2, b2_y2)
w = np.maximum(0.0, yy2 - yy1)
h = np.maximum(0.0, xx2 - xx1)
inter = w * h
IoU = inter/((b1_x2-b1_x1)*(b1_y2-b1_y1) + (b2_x2-b2_x1)*(b2_y2-b2_y1) - inter)
print("IoU: ", IoU)
return IoU
box1 = np.array([100, 100, 210, 210])
box2 = np.array([150, 150, 230, 220])
IoU(box1, box2)
多维度box实现
import numpy as np
def box_iou(boxes1, boxes2):
"""计算两个锚框或边界框列表中成对的交并比"""
# boxes1,boxes2,areas1,areas2的形状:
# boxes1:(boxes1的数量,4),
# boxes2:(boxes2的数量,4),
box_area = lambda boxes: ((boxes[:, 2] - boxes[:, 0]) * (boxes[:, 3] - boxes[:, 1]))
# areas1:(boxes1的数量,),
# areas2:(boxes2的数量,)
areas1 = box_area(boxes1)
areas2 = box_area(boxes2)
# inter_upperlefts,inter_lowerrights,inters的形状:
# (boxes1的数量,boxes2的数量,2)
inter_upperlefts = np.maximum(boxes1[:, None, :2], boxes2[:, :2])
inter_lowerrights = np.minimum(boxes1[:, None, 2:], boxes2[:, 2:])
inters = (inter_lowerrights - inter_upperlefts).clip(min=0)
# inter_areasandunion_areas的形状:(boxes1的数量,boxes2的数量)
inter_areas = inters[:, :, 0] * inters[:, :, 1]
union_areas = areas1[:, None] + areas2 - inter_areas
IOU= inter_areas / union_areas
return IOU
if __name__ == "__main__":
box1 = np.array([[100, 100, 210, 210]])
box2 = np.array([[150, 150, 230, 220]])
res=box_iou(box1, box2)
print(res)
torch实现
import numpy as np
import torch
def box_iou(boxes1, boxes2):
"""计算两个锚框或边界框列表中成对的交并比"""
# boxes1,boxes2,areas1,areas2的形状:
# boxes1:(boxes1的数量,4),
# boxes2:(boxes2的数量,4),
box_area = lambda boxes: ((boxes[:, 2] - boxes[:, 0]) * (boxes[:, 3] - boxes[:, 1]))
# areas1:(boxes1的数量,),
# areas2:(boxes2的数量,)
areas1 = box_area(boxes1)
areas2 = box_area(boxes2)
# inter_upperlefts,inter_lowerrights,inters的形状:
# (boxes1的数量,boxes2的数量,2)
inter_upperlefts = torch.max(boxes1[:, None, :2], boxes2[:, :2])
inter_lowerrights = torch.min(boxes1[:, None, 2:], boxes2[:, 2:])
inters = (inter_lowerrights - inter_upperlefts).clamp(min=0)
# inter_areasandunion_areas的形状:(boxes1的数量,boxes2的数量)
inter_areas = inters[:, :, 0] * inters[:, :, 1]
union_areas = areas1[:, None] + areas2 - inter_areas
return inter_areas / union_areas
if __name__ == "__main__":
box1 = np.array([[100, 100, 210, 210]])
box2 = np.array([[150, 150, 230, 220]])
res=box_iou(torch.from_numpy(box1), torch.from_numpy(box2))
print(res)
参考资料 https://zh.d2l.ai/chapter_computer-vision/anchor.html#iou
优缺点
优点
1.可以反映预测检测框与真实检测框的检测效果。
2.尺度不变性,也就是对尺度不敏感(scale invariant) 在regression任务中,判断predict box和gt的距离最直接的指标就是IoU
缺点
1. 如果两个框没有相交,根据定义,IoU=0,不能反映两者的距离大小(重合度)。 无法衡量完全不相交的两个框
同时因为loss=0,没有梯度回传,无法进行学习训练。
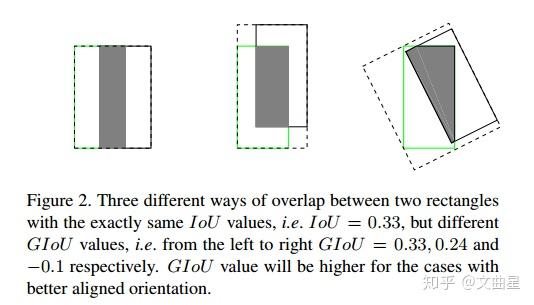
2.IoU无法精确的反映两者的重合度大小。 两个不同形状的预测框可能产生相同的loss
如下图所示,三种情况IoU都相等,但看得出来他们的重合度是不一样的,左边的图回归的效果最好,右边的最差。
GIoU Loss
先计算两个框的最小闭包区域面积Ac 即 预测框和真实框的最小外接矩形, 求出最小外接矩形减去两个预测框union的面积
(通俗理解:同时包含了预测框和真实框的最小框的面积)
与IoU相似,GIoU也是一种距离度量 GIoU的范围是[-1, 1] GIOU Loss的范围在[0, 2]
GIoU是IoU的下界,在两个框无限重合的情况下,IoU=GIoU=1
与IoU只关注重叠区域不同,GIoU不仅关注重叠区域,还关注其他的非重合区域
numpy实现
def GIoU(box1, box2):
b1_x1, b1_y1, b1_x2, b1_y2 = box1
b2_x1, b2_y1, b2_x2, b2_y2 = box2
# IOU
xx1 = np.maximum(b1_x1, b2_x1)
yy1 = np.maximum(b1_y1, b2_y1)
xx2 = np.minimum(b1_x2, b2_x2)
yy2 = np.minimum(b1_y2, b2_y2)
inter_w = np.maximum(0.0, yy2 - yy1)
inter_h = np.maximum(0.0, xx2 - xx1)
inter = inter_w * inter_h
Union = (b1_x2-b1_x1)*(b1_y2-b1_y1) + (b2_x2-b2_x1)*(b2_y2-b2_y1) - inter
# GIOU
C_xx1 = np.minimum(b1_x1, b2_x1)
C_yy1 = np.minimum(b1_y1, b2_y1)
C_xx2 = np.maximum(b1_x2, b2_x2)
C_yy2 = np.maximum(b1_y2, b2_y2)
C_area = (C_xx2 - C_xx1) * (C_yy2 - C_yy1)
# 计算IOU
IOU = inter / Union
GIOU = IOU - abs((C_area-Union)/C_area)
print("GIOU:", GIOU)
if __name__ == "__main__":
box1 = np.array([100, 100, 210, 210])
box2 = np.array([150, 150, 230, 220])
GIoU(box1, box2)
def box_giou(boxes1, boxes2):
"""计算两个锚框或边界框列表中成对的交并比"""
# boxes1,boxes2,areas1,areas2的形状:
# boxes1:(boxes1的数量,4),
# boxes2:(boxes2的数量,4),
box_area = lambda boxes: ((boxes[:, 2] - boxes[:, 0]) * (boxes[:, 3] - boxes[:, 1]))
# areas1:(boxes1的数量,),
# areas2:(boxes2的数量,)
areas1 = box_area(boxes1)
areas2 = box_area(boxes2)
# inter_upperlefts,inter_lowerrights,inters的形状:
# (boxes1的数量,boxes2的数量,2)
inter_upperlefts = np.maximum(boxes1[:, None, :2], boxes2[:, :2])
inter_lowerrights = np.minimum(boxes1[:, None, 2:], boxes2[:, 2:])
inters = (inter_lowerrights - inter_upperlefts).clip(min=0) # 截取函数最小=0
# inter_areasandunion_areas的形状:(boxes1的数量,boxes2的数量)
inter_areas = inters[:, :, 0] * inters[:, :, 1]
union_areas = areas1[:, None] + areas2 - inter_areas
IOU= inter_areas / union_areas
# GIOU
out_upperlefts = np.minimum(boxes1[:, None, :2], boxes2[:, :2])
out_lowerrights = np.maximum(boxes1[:, None, 2:], boxes2[:, 2:])
outs = (out_lowerrights - out_upperlefts).clip(min=0) # 截取函数最小=0
outs_areas = outs[:, :, 0] * outs[:, :, 1]
GIOU = IOU - abs((outs_areas-union_areas)/outs_areas)
print("GIOU:", GIOU)
return GIOU
torch实现
def box_giou(boxes1, boxes2):
"""计算两个锚框或边界框列表中成对的交并比"""
# boxes1,boxes2,areas1,areas2的形状:
# boxes1:(boxes1的数量,4),
# boxes2:(boxes2的数量,4),
box_area = lambda boxes: ((boxes[:, 2] - boxes[:, 0]) * (boxes[:, 3] - boxes[:, 1]))
# areas1:(boxes1的数量,),
# areas2:(boxes2的数量,)
areas1 = box_area(boxes1)
areas2 = box_area(boxes2)
# inter_upperlefts,inter_lowerrights,inters的形状:
# (boxes1的数量,boxes2的数量,2)
inter_upperlefts = torch.max(boxes1[:, None, :2], boxes2[:, :2])
inter_lowerrights = torch.min(boxes1[:, None, 2:], boxes2[:, 2:])
inters = (inter_lowerrights - inter_upperlefts).clip(min=0) # 截取函数最小=0
# inter_areasandunion_areas的形状:(boxes1的数量,boxes2的数量)
inter_areas = inters[:, :, 0] * inters[:, :, 1]
union_areas = areas1[:, None] + areas2 - inter_areas
IOU= inter_areas / union_areas
# GIOU
out_upperlefts = torch.min(boxes1[:, None, :2], boxes2[:, :2])
out_lowerrights = torch.max(boxes1[:, None, 2:], boxes2[:, 2:])
outs = (out_lowerrights - out_upperlefts).clip(min=0) # 截取函数最小=0
outs_areas = outs[:, :, 0] * outs[:, :, 1]
GIOU = IOU - abs((outs_areas-union_areas)/outs_areas)
print("GIOU:", GIOU)
return GIOU
优缺点
优点
GIOU Loss解决了IOU Loss在不相交情况的问题
GIoU考虑到了 IoU 没有考虑到的预测框和真实框的非重叠区域
缺点
无法衡量有包含关系时的框回归损失, 当预测框和真实框完全重合时(预测框在真实框的内部)GIOU=IOU
GIOU仍然严重依赖IOU,因此在两个垂直方向,误差很大,基本很难收敛,不稳定
DIoU Loss
针对上述GIOU的两个问题,将GIOU中引入最小外接框来最大化重叠面积的惩罚项修改成最小化两个BBox中心点的标准化距离从而加速损失的收敛过程
DIoU要比GIou更加符合目标框回归的机制,将目标与anchor之间的距离,重叠率以及尺度都考虑进去,使得目标框回归变得更加稳定,不会像IoU和GIoU一样出现训练过程中发散等问题。
其中, $$b$$ , 分别代表了预测框和真实框的中心点,且 $$b^{gt}$$ 代表的是计算两个中心点间的欧式距离。 $$\rho$$ 代表的是能够同时包含预测框和真实框的最小闭包区域的对角线距离。
numpy实现
def DIoU(box1, box2):
b1_x1, b1_y1, b1_x2, b1_y2 = box1
b2_x1, b2_y1, b2_x2, b2_y2 = box2
# IOU
xx1 = np.maximum(b1_x1, b2_x1)
yy1 = np.maximum(b1_y1, b2_y1)
xx2 = np.minimum(b1_x2, b2_x2)
yy2 = np.minimum(b1_y2, b2_y2)
inter_w = np.maximum(0.0, xx2 - xx1)
inter_h = np.maximum(0.0, yy2 - yy1)
inter = inter_w * inter_h
Union = (b1_x2 - b1_x1)*(b1_y2 - b1_y1) + (b2_x2 - b2_x1)*(b2_y2 - b2_y1) - inter
# DISTANCE
C_xx1 = np.minimum(b1_x1, b2_x1)
C_yy1 = np.minimum(b1_y1, b2_y1)
C_xx2 = np.maximum(b1_x2, b2_x2)
C_yy2 = np.maximum(b1_y2, b2_y2)
C_area = (C_xx2 - C_xx1) * (C_yy2 - C_yy1)
center_b_x = (b1_x1+b1_x2)/2
center_b_y = (b1_y1+b1_y2)/2
center_gtb_x = (b2_x1+b2_x2)/2
center_gtb_y = (b2_y1+b2_y2)/2
center_distance = (center_gtb_x-center_b_x)**2 + (center_gtb_y-center_b_y)**2
c_distance = (C_xx2 - C_xx1)**2 + (C_yy2 - C_yy1)**2
IOU = inter/Union
DIOU = IOU - center_distance /c_distance
print("DIOU:", DIOU)
if __name__ == "__main__":
box1 = np.array([100, 100, 210, 210])
box2 = np.array([150, 150, 230, 220])
DIoU(box1, box2)
import numpy as np
def DIoU(boxes1, boxes2):
"""计算两个锚框或边界框列表中成对的交并比"""
# boxes1,boxes2,areas1,areas2的形状:
# boxes1:(boxes1的数量,4),
# boxes2:(boxes2的数量,4),
box_area = lambda boxes: ((boxes[:, 2] - boxes[:, 0]) * (boxes[:, 3] - boxes[:, 1]))
# areas1:(boxes1的数量,),
# areas2:(boxes2的数量,)
areas1 = box_area(boxes1)
areas2 = box_area(boxes2)
# inter_upperlefts,inter_lowerrights,inters的形状:
# (boxes1的数量,boxes2的数量,2)
inter_upperlefts = np.maximum(boxes1[:, None, :2], boxes2[:, :2])
inter_lowerrights = np.minimum(boxes1[:, None, 2:], boxes2[:, 2:])
inters = (inter_lowerrights - inter_upperlefts).clip(min=0) # 不想交为负值,截取函数最小=0
# inter_areasandunion_areas的形状:(boxes1的数量,boxes2的数量)
inter_areas = inters[:, :, 0] * inters[:, :, 1]
union_areas = areas1[:, None] + areas2 - inter_areas
IOU= inter_areas / union_areas
# 中心坐标
center_b_x = (boxes1[:,0]+boxes1[:,2])/2
center_b_y = (boxes1[:,1]+boxes1[:,3])/2
center_gtb_x = (boxes2[:,0]+boxes2[:,2])/2
center_gtb_y = (boxes2[:,1]+boxes2[:,3])/2
# 中心距离
center_distance= (center_gtb_x-center_b_x)**2 + (center_gtb_y-center_b_y)**2
# 45对角距离
out_upperleft= np.minimum(boxes1[:, :2], boxes2[:, :2])
out_lowerright= np.maximum(boxes1[:, 2:], boxes2[:, 2:])
out_union = (out_lowerright - out_upperleft).clip(min=0)
c_distance = out_union[:, 0] **2 + out_union[:, 1]**2
DIOU = IOU - center_distance /c_distance
return DIOU
if __name__ == "__main__":
box1 = np.array([[100, 100, 210, 210]])
box2 = np.array([[150, 150, 230, 230]])
DIoU(box1, box2)
优缺点
优点:
1.DIOU与IOU、GIOU一样具有尺度不变性;
2.与GIoU loss类似 在与目标框不重叠时,仍然可以为边界框提供移动方向
3.DIoU loss可以直接最小化两个目标框的距离,因此比GIoU loss收敛快得多
4.包含两个框在水平方向和垂直方向,DIoU损失可以使回归非常快, 依赖于预测框和真实框中心点的距离
5.DIoU还可以替换普通的IoU评价策略,应用于NMS中,使得NMS得到的结果更加合理和有效
CIoU Loss
虽然DIOU能够直接最小化预测框和真实框的中心点距离加速收敛,但是Bounding box的回归还有一个重要的因素宽高比暂未考虑。
bbox回归三要素中的长宽比还没被考虑到计算中
DIoU= IoU- \frac{\rho{2}(b,b) }{ c^{2} } -\frac{\rho2(w,w)}{C_{w}^{2} } -\frac{\rho2(h,h)}{C_{h}^{2} }

 浙公网安备 33010602011771号
浙公网安备 33010602011771号