JavaScript WebGL 矩阵
目录
引子
本以为可以开始尝试三维的效果了,查了一下资料之后发现要先了解矩阵。在这里集中收集一下相关基础知识点。
简介
简单来说,矩阵(Matrix)是数字按行和列的矩形排列。一般描述先行后列,例如下面 2×3 矩阵:
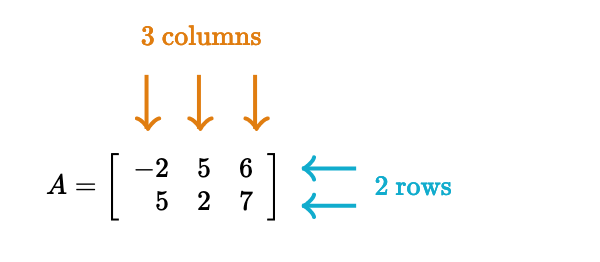
矩阵中每个元素表示也可以根据行和列标记,例如 a1,2 表示第 1 行的第 2 列元素。
- 在应用数学学科中,矩阵常见于统计分析。
- 在物理学中,矩阵于电路学、力学、光学和量子物理中都有应用。
- 计算机科学中,三维动画制作需要用到矩阵。
单位矩阵
单位矩阵有如下特点:
- 行数和列数相等。
- 对角线全是 1,其它全是 0 。
- 符号为大写字母 I 。
- 与任何矩阵相乘不会产生改变,例如 A × I = A。
下面是 3×3 单位矩阵:

负矩阵
简单来说就是矩阵里面每个元素求反。
例如矩阵 A 如下:

对应负矩阵就是:

转置
转置就是把矩阵的列和行对换。在右上角放一个 T 表示转置:

转置满足以下运算律:
- (AT)T = A
- (λA)T = λAT
- (AB)T = ATBT
基本运算
加法
只有同型(行数和列数对应相等)矩阵才能进行相加。相加时,对应的位置数进行相加。示例如下:

加法满足以下运算律:
- A + B = B + A
- (A + B) + C = A + (B + C)
减法
减法实际上就是与负矩阵相加。前提条件是两个为同型矩阵。示例如下:

矩阵与数相乘
矩阵与一个数相乘,矩阵中每个元素与数相乘。示例如下:

数乘满足以下运算律:
- λ(μA) = μ(λA)
- λ(μA) = (λμ)A
- (λ + μ)A = λA + λμ
- λ(A + B) = λA + λB
矩阵与矩阵相乘
两个矩阵能相乘的前置条件是:第一个矩阵的列数必须等于第二个矩阵的行数。
m×n 矩阵 A 乘以 n×p 矩阵 B 得到的是一个 m×p 矩阵 C 。矩阵 C 中每个元素的计算方式为:

这里有个结合实例的解释,下面是计算示例:

- c1,1 = a1,1 × b1,1 + a1,2 × b2,1 + a1,3 × b3,1 = 0×1 + 1×2 + 2×3 = 8
- c1,2 = a1,1 × b1,2 + a1,2 × b2,2 + a1,3 × b3,2 = 0×4 + 1×5 + 2×6 = 17
- c2,1 = a2,1 × b1,1 + a2,2 × b2,1 + a2,3 × b3,1 = 2×1 + 1×2 + 0×3 = 4
- c2,2 = a2,1 × b1,2 + a2,2 × b2,2 + a2,3 × b3,2 = 2×4 + 1×5 + 0×6 = 13
矩阵相乘满足以下运算律:
- (AB)C = A(BC)
- (A + B)C = AC + BC
- C(A + B) = CA + CB
这里需要注意矩阵相乘不满足互换律,也就是 AB != BA 。
逆矩阵
数有倒数,矩阵有类似的概念,叫逆矩阵,表示形式为 A-1 。数与倒数的乘积为 1 ,类似的,矩阵与逆矩阵相乘结果是单位矩阵:AA-1 = I 。
行数和列数相等的矩阵才可能有逆矩阵。更详细的讲解见这里。
计算逆矩阵的方式是:
这个在下面除法中会用到。
矩阵与矩阵相除
在矩阵中是没有除的概念,乘以逆矩阵,这和除是相同的效果。
假设已知矩阵 A 和 B ,且 A 存在逆矩阵,需要求矩阵 X :
XA = B
可以这样做:
- XAA-1 = BA-1
前面有提到 AA-1 = I,所以:
- XI = BA-1
单位矩阵相乘是不会改变原矩阵的,所以:
- X = BA-1
矩阵与向量相乘
矩阵与向量相乘是方程组的一种解释方式,具体解释看这里,有两条重要的规律:
- 矩阵乘以右侧列向量可看成矩阵各列向量的线性组合,结果为列向量。
- 左侧行向量乘以矩阵可看成矩阵各行向量的线性组合,结果为行向量。
WebGL 中的顶点坐标都可以转换为向量的形式,进行变换时,向量和矩阵相乘是一种高效的方式。先看看二维变换:位移、缩放和旋转。
二维变换
以下是纯数学理论计算,跟实际编程应用可能有些出入。
位移
先看下不使用矩阵的实现方式,坐标(x, y),分量对应位移 Tx 和 Ty,那么新坐标:
- newX = x + Tx
- newY = y + Ty
单位矩阵通常是生成其它变换矩阵的起点,向量与单位矩阵相乘不会改变向量:

两种计算方式对比:
- 非矩阵方式:newX = x + Tx
- 矩阵方式:newX = x
发现用 2×2 矩阵变换不行,需要 3×3 矩阵 。向量也要多一个分量才能相乘,这里设置为 z ,再来看下计算:

可以发现当 z = 1 时得到的结果就符合了位移效果。
缩放
缩放量为 Sx 和 Sy ,2×2 矩阵就可以满足缩放的效果:

旋转
先看下不使用矩阵的实现方式。为了描述旋转,需要指明:
- 旋转轴
- 旋转方向
- 旋转角度
这里设定旋转绕 Z 轴,旋转方向是逆时针,旋转角度是 β 。点 (x, y) 旋转 β 角度后变成了点(newX, newY),结合三角函数可得:
- newX = xcos(β) - ysin(β)
- newY = xsin(β) + ycos(β)
再看下使用矩阵的实现方式:

两种计算方式对比:
- 非矩阵方式:newX = xcos(β) - ysin(β)
- 矩阵方式:newX = ax + by
如果 a = cos(β),b = -sin(β),两个等式就相同了。类似的对 y 坐标转换后,最终得到的矩阵为:

WebGL 二维变换
在数学约定中,横着是行,竖着是列,基于这样进行构造矩阵。但在 WebGL 编程中,由于一些原因,程序会把视觉上的行解析为列。
位移
这是数学意义的位移矩阵形式:
const m3 = [
1, 0, tx, // 行
0, 1, ty, // 行
0, 0, 1, // 行
]
这是在 WebGL 编程中能正确解析的位移矩阵:
const m3 = [
1, 0, 0, // 列
0, 1, 0, // 列
tx, ty, 1, // 列
]
来分别看看这两个位移矩阵的示例:
程序中使用数学角度的矩阵形式,对应数学角度上会导致计算结果都到 Z 分量上了,二维是用不到 Z 分量的,不会产生任何变化,示例也是这样的结果。
缩放
WebGL 中缩放矩阵:
function getTransform (x, y) {
return [
x, 0, 0,
0, y, 0,
0, 0, 1,
];
}
这是示例。
旋转
WebGL 中旋转矩阵:
function getTransform (angle) {
const radian = (Math.PI * angle) / 180;
const cosA = Math.cos(radian);
const sinA = Math.sin(radian);
return [
cosA, sinA, 0,
-sinA, cosA, 0,
0, 0, 1,
];
}
这是示例,旋转方向可以用旋转角度值的正负表示,本示例中如果是正值,就表示逆时针旋转。
旋转围绕的中心默认是图形的中心,如果需要围绕指定点旋转,需要在旋转之后乘以位移矩阵,这是示例。
更加详细的解释可以参考下面两个链接:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号