Ubuntu部署ros小龟爬爬实例
环境准备
图形化Ubuntu系统
环境配置
打开你的终端开始粘贴命令:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
sudo apt update
sudo apt install ros-noetic-desktop-full
这里可能要等很久,请耐心等待。
source /opt/ros/noetic/setup.bash
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
echo "source /opt/ros/noetic/setup.zsh" >> ~/.zshrc
source ~/.zshrc
小海龟例程:
打开终端:开启roscore
roscore
再开一个终端:产生一个小海龟
rosrun turtlesim turtlesim_node
再开一个终端:开启操控
rosrun turtlesim turtle_teleop_key
再开一个终端:观察参数
rosrun rqt_graph rqt_graph
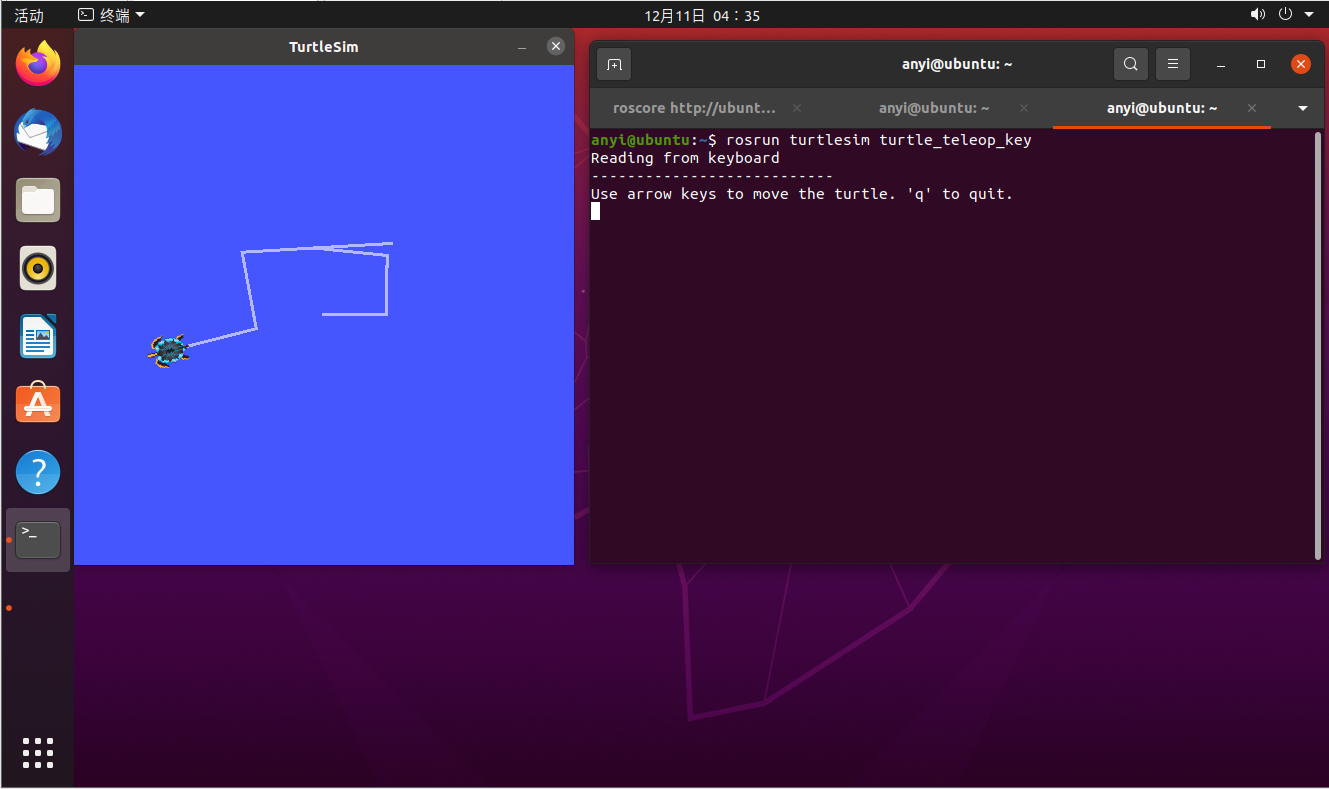
完活,小龟龟爬爬!

