KinectFusion 介绍
KinectFusion简介
KinectFusion是微软在2011年发表的一篇论文里提到的点云重建的方法,论文题目是:KinectFusion: Real-Time Dense Surface Mapping and Tracking。点云是用Kinect采集的,然后算法把这些点云注册对齐,融合成一个整体点云。
Kinect是一个RGBD扫描仪,它可以同时采集彩色图像和深度图像。这是第一代Kinect和第二代Kinect的外观比较。

Kienct每秒可以获取30帧的RGBD图像,光线暗的情况下帧率会下降一些。
这是一个典型的KinectV2的数据。左边是带颜色的点云,右边的点云去掉了颜色,并且计算了法线信息。KinectFusion处理的是深度数据,像右边这种没有带颜色的点云。Kinect数据的详细介绍可以参考专题 Kinect数据

KinectFusion的核心有两个技术,一个是ICP注册,一个是符号距离函数。它的思路是一边注册,一边融合。由于是深度视频,帧与帧之间的位置差别不大,点云可以看作是初始注册好的,所以可以直接应用ICP进行精细注册。融合采用了符号距离函数技术,它在空间中定义了一个曲面的距离场,0等值面则为测量的曲面。
KinectFusion算法
下面介绍一下KinectFusion的算法步骤:
1. 生成三维点云:Kinect采集的原始数据是深度图像,可以用KinectSDK把深度图像转化为三维点云。
2. 点云预处理:预处理包含很多可选的算子,比如法线计算,点云范围裁剪(有些扫描仪在一定范围内的误差是可以接受的,故可以剔除掉误差范围大的区域),去噪(低精度的扫描数据可以去噪提高注册稳定性),边界点剔除(边界点的误差通常很大),孤立项剔除(孤立项的误差通常也很大)等。
3. 点云位姿估计:KinectFusion是一边注册,一边融合,所以它会维护一个当前融合的整体点云,记为PointCloud。新扫描的点云Depth,就是与PointCloud进行ICP注册。ICP注册的详细介绍可以参考专题 点云ICP注册。
4. 点云融合:Depth与PointCloud注册好以后,它会与PointCloud再进行融合,更新PointCloud。
5. 整个扫描过程,每帧的点云重复步骤1-4,最后就得到一个整体点云PointCloud。
符号距离场函数(Signed Distance Function)
符号距离场函数,简称SDF,源自1996的一篇Siggraph论文:A volumetric method for building complex models from range images
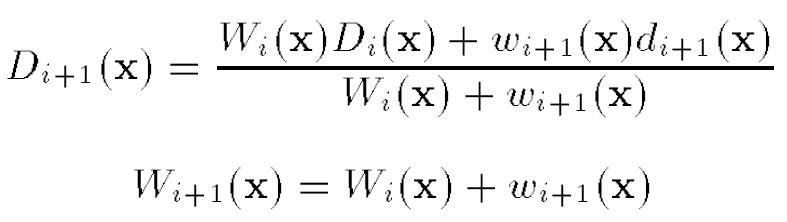
SDF是定义在三维空间中的一个函数,它度量了空间点到曲面的距离。距离为0的点即为曲面上的点。我们把SDF离散化,定义在空间体素上。每个体素有三个变量:D,W,Flag。其中D为体素到曲面的距离值,W是权重,Flag是体素是否有效。
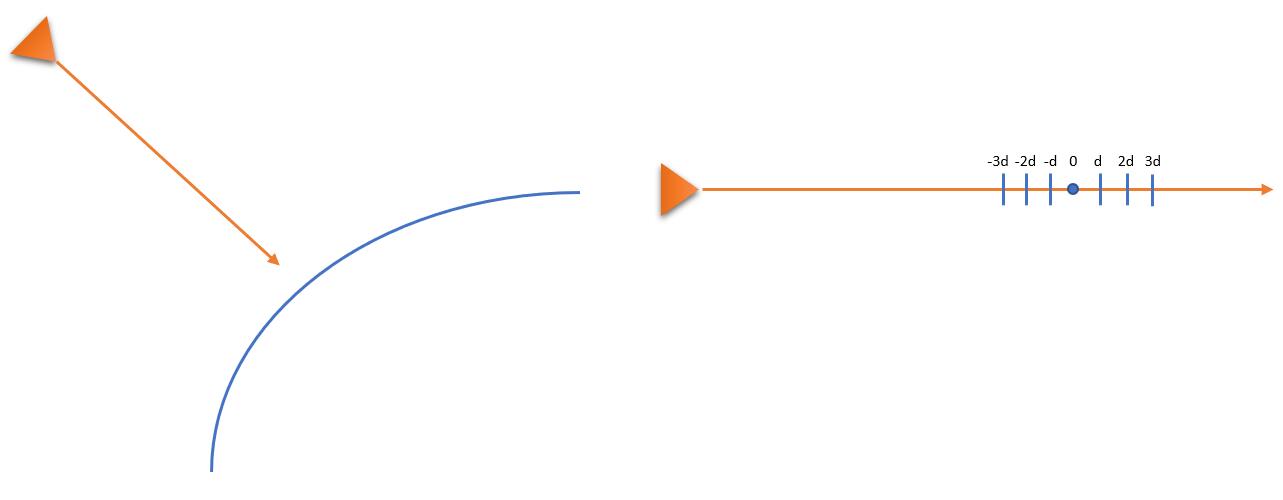
下面介绍点云如何融入SDF:点云是相机在某个视角下观察采集到的,如左图所示。单从一个视线观测一点来分析,如右图所示,这个视线上的点到曲面的距离可以定义如下,视线方向上,观测点前面的距离为负,观测点后面的距离为正。由于SDF是定义在空间中的体素里,我们这里也把距离离散化到体素里,其中d是体素宽度。由于系统误差的存在,我们给这些体素值一个权重,越靠近点云的体素权重越大。
点云注册后,不断的往SDF里进行融合更新,最后把SDF的0等值面提取出来,就是融合的点云了。
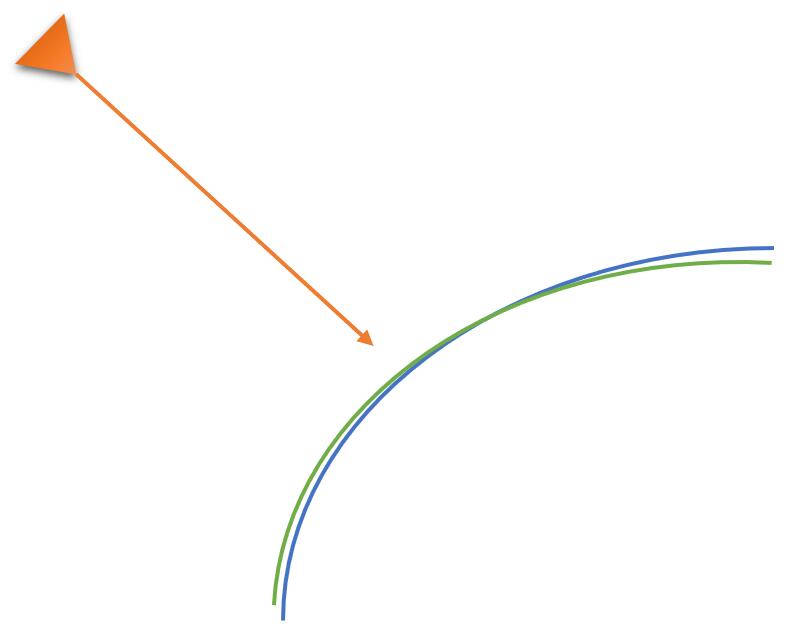
SDF把点云通过距离函数的形式,离散化到空间体素里。而它的精髓在于给距离函数定义了一个范围,这个范围使得距离函数有了一定程度的光滑性。因为Kinect数据精度是很低的,两次观测的点云,会有很大的误差,如图所示。多个点云融合在一起,如何达到平均的效果,就是通过平均距离函数来实现的。我们知道,光滑函数的叠加,也是一个光滑函数。所以,每个距离函数光滑化以后,使得融合后的距离函数也是光滑的。而这个光滑性,就使得融合点云是光滑的,并且一定程度上能消掉点云重影。
KinectFusion算法分析
下面点评一下KinectFusion算法:
- KienctFusion属于SLAM前端,高质量的点云重建还需要加入后端全局优化
- KienctFusion注册时采用了Frame-to-Model的方式,也就是采集的点云与SDF融合的点云进行注册。有时候也可以用Frame-to-Frame的方式,也就是点云与前帧点云进行注册。这样速度可以更快一些。
- 点云注册只应用了深度图像,这个算是一个优点,比如有些场景下只有深度数据。有些时候,扫描对象的几何特征不明显,如果能借助彩色图像的辅助,点云注册可以更加的稳定。
- 点云融合的时候,KinectFusion采用了SDF技术,它擅长融合低精度数据,但是开销还是比较大的。可以采用一些性能高的融合方法来替换SDF。
- 原论文里面采用了GPU加速来达到实时。根据现在的CPU性能,其实是不用GPU辅助就能达到实时的。
- KinectFusion算是三维SLAM前端的一个开始,之后出现了大量的三维SLAM前端方案,都是解决一些实际的问题,比如采集数据的质量差;扫描对象的特征不明显,这个特征包括几何特征和颜色特征;大数据量导致的质量和性能的平衡;多传感器的融合;面向移动设备的处理等。
有兴趣的读者,欢迎参考视频版本

 浙公网安备 33010602011771号
浙公网安备 33010602011771号