
【Steering Behaviors】
1、Seek
下述的算法是一个基本Seek行为,但不带任何Steering输出的力。在该公式作用下,游戏个体的移动方式是直线型的,如果target的位置变了的话,个体会立即响应,并且会以新的方向,以直线的形式向目标位置靠近,这会给人一种从当前路径突兀的变换到新路径的感觉。

Seek行为被分解为两个力:目标速度,和转向速度。目标速度始终朝向目标位置,转向力是目标速度减去个体的当前速度得出的,它的物理意义就是向着目标位置给个体一个推力。
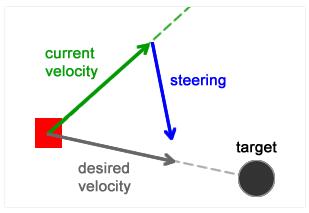

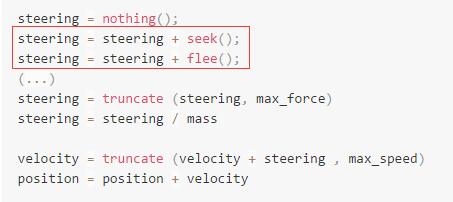
计算了转向力之后,它必须和原先版本的速度方向合成,再施加给个体。

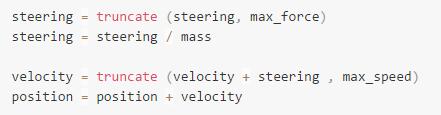
注意,seek中要限制steering的最大值,否则每一次 velocity+steering 均会等于 desired velocity。
2、Flee。
Flee的desired velocity调整为seek的相反位置:


使用Flee算法,可以避免角色大幅转向(如180度)问题,如下,橘色为转向曲线:

注意:Flee中也要对 steering 限速。
3、Arrival
Seek行为使个体向目标位置移动,当个体移动到目标点后,算法仍旧作用在个体之上,对它施加转向力,这会导致个体在目标点周围来回移动。
Arrival行为会规避个体移动超过目标点的现象,当个体靠近目标点时,它会使个体减速,最终停在目标点上。
行为被分成两个阶段:
1)第一阶段是个体还远离目标点时,它的工作方式和之前介绍的Seek行为一样
2)第二阶段是个体靠近目标点时,在减速范围内。
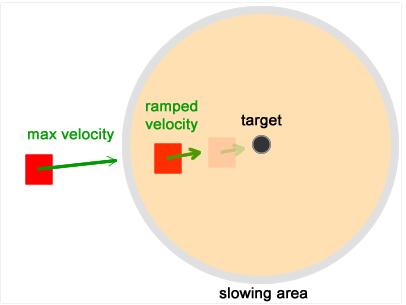


注意:Arrival 中不需要对 steering 限速,因为如果desired_velocity降为0,那么转向力会是velocity,那么它和速度方向的合力为 0,个体就不会运动了。
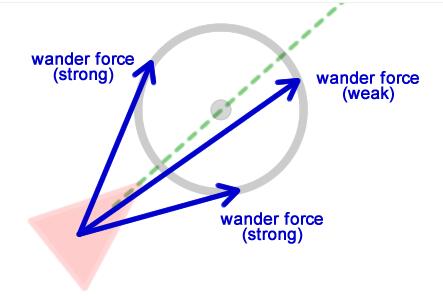
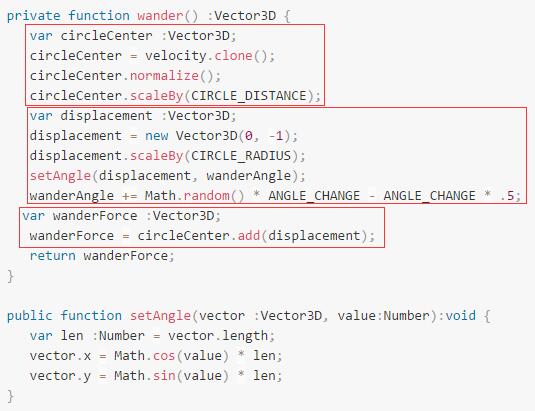
4、Wander
游戏AI的前方加一个圈,圈的半径以及角色到圈的距离越大,施加在角色身上的推力就越强。
1)CircleCenter 向量。


2)displacement,计算移位力


综合起来就是以下这样:
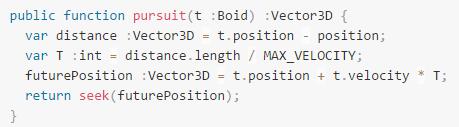
5、Persulit
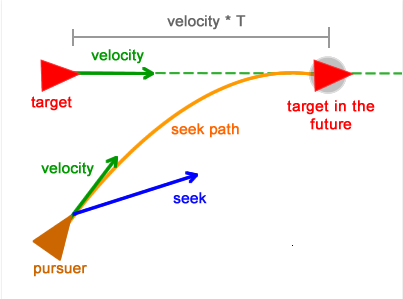


当T是一个常数时,会有一个问题:在离目标点很近的距离下,追踪的准确度会变得很差。
这是因为当追踪者靠近目标后,追踪者还是以常数T时间后的位置进行预测。这和真实的追踪行为相违背,真实的追铺在靠近物体后会停止预测,并且以物体当前实际位置作为目标点。
有一个简单的方式来改进我们上面的追捕逻辑,就是用动态的T来替换之前恒定的T。

6、整合

 浙公网安备 33010602011771号
浙公网安备 33010602011771号