膨胀和腐蚀 - 解决图像缺陷问题
腐蚀
故名思义就是将图片向内进行收缩。
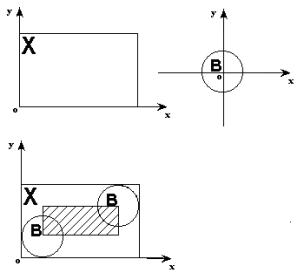
图1 腐蚀示意图
设经过背景减后的图像为 B,经过腐蚀运算处理后的图像为 P,用 S 表示所用 3R圆(为进化计算可由采用3x3的矩形来代替) 的结构元素,计算公式如下:
这里 \(S_{x,y}\) 表示将结构元素的原点移动到点 (x, y) 处。
腐蚀运算的具体过程如下:
选定结构元素 S 的起点,以该点开始遍历经背景减的图像 B 上的所有像素点;结构元素与其所覆盖范围的所有像素点进行“与”操作,若相“与”后的像素值全部为 255,则腐蚀运算后该点的像素值为 255;若像素值不全为 255,则腐蚀运算后该点的像素值为 0。
常用的结构元素一般都是大小为 3*3 的矩阵算子,由实验可知,对运动图像进行闭运算,可以很好的修补轮廓上的一些缺陷,填充运动对象内部较小的空洞。图2为图像经闭运算处理后的变化。
膨胀
故名思义就是将图片向外延进行收缩。
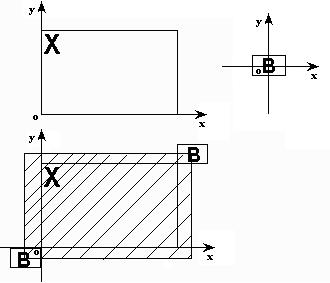
图2 膨胀示意图
这里,\(S_{x,y}\)表示将结构元素的原点移动到点 (x, y) 处。
膨胀运算的过程如下:
首先确定膨胀算子的结构元素 S 的原点,以该原点开始,扫描图像 B 中的所有像素点。把结构元素在图像上进行遍历,把结构元素与其覆盖的像素点进行“与”操作,如果该区域中存在像素值为 255 的点,则经过该操作就把当前点赋为 255,若该区域所有的点的值都是 0,经膨胀操作后该点的值也为 0。
闭运算 && 开运算
开运算是先后进行腐蚀和膨胀的运算,如果图像中杂散的背景噪声过多时,腐蚀运算消去这些背景噪声,由于在进行腐蚀操作时,被测目标的轮廓也会被腐蚀掉一部分,因此就需要采用膨胀运算对目标轮廓进行恢复。开运算可以消除一些杂散噪声的影响,且可以保证被测目标的轮廓不变形。
闭运算是采用先膨胀后腐蚀的方式进行的,膨胀运算可以把图像中一些小的断开或者目标区域背部的空洞补齐,然后由腐蚀预算把目标轮廓外围的一些噪声消掉。
闭运算处理以后的图片如下,可以看出,将有缺陷的部分补全。


a)处理之前 b)处理以后

 浙公网安备 33010602011771号
浙公网安备 33010602011771号