
(笔记)PID算法讲解(原理+算法+源码)
PID算法资料很多,质量高低不一,但若想把PID研究透,还是需要仔细甄别与筛选。本文根据网上一些较好的文章及个人理解,整理成文,也是给自己做了笔记。
在此感谢: https://zhuanlan.zhihu.com/p/16875161
注:由于博客园没法直接附上文件,若需要算法源码及可运行文件(已在uBuntu上验证),可以留言邮箱,我会通过邮件给到。
1 前言
控制系统通常根据有没有反馈会分为开环系统和闭环系统,在闭环系统的控制中,PID算法非常强大,其三个部分分别为;
P:比例环节;I:积分环节;D:微分环节;
PID算法可以自动对控制系统进行准确且迅速的校正,因此被广泛地应用于工业控制系统。
2 开环控制
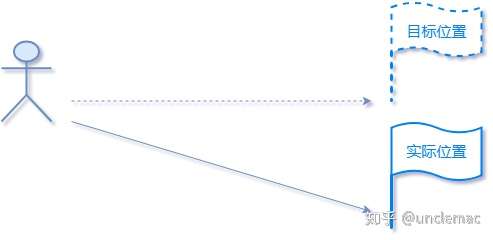
首先来看开环控制系统,如下图所示,隆哥蒙着眼,需要走到虚线旗帜所表示的目标位置,由于缺少反馈(眼睛可以感知当前距离和位置,由于眼睛被蒙上没有反馈,所以这也是一个开环系统),最终隆哥会较大概率偏离预期的目标,可能会运行到途中实线旗帜所表示的位置。
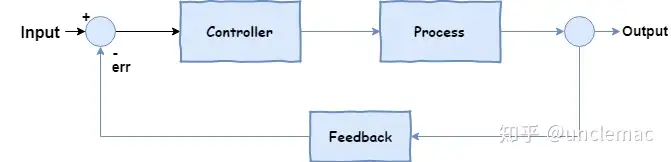
开环系统的整体结构如下所示;

这里做一个不是很恰当的比喻;
Input: 告诉隆哥目标距离的直线位置(10米);Controller:隆哥大脑中计算出到达目标所需要走多少步;Process: 双腿作为执行机构,输出了相应的步数,但是最终仍然偏离了目标;
看来没有反馈的存在,很难准确到达目标位置。
3 闭环控制
所以为了准确到达目标位置,这里就需要引入反馈,具体如下图所示;
在这里继续举个不怎么恰当的比喻;隆哥重获光明之后,基本可以看到目标位置了;
- 第一步
Input: 告诉隆哥目标距离的直线位置(10米); - 第二步
Controller:隆哥大脑中计算出到达目标所需要走多少步; - 第三步
Process: 双腿作为执行机构,输出了相应的步数,但是最终仍然偏离了目标; - 第四步
Feedback: 通过视觉获取到目前已经前进的距离,(比如前进了2米,那么还有8米的偏差); - 第五步
err: 根据偏差重新计算所需要的步数,然后重复上述四个步骤,最终隆哥达到最终的目标位置。
4 PID
4.1 系统架构
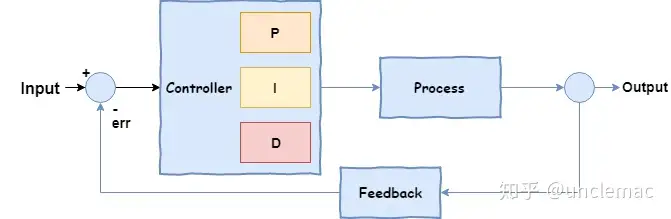
虽然在反馈系统下,隆哥最终到达目标位置,但是现在又来了新的任务,就是又快又准地到达目标位置。所以这里隆哥开始采用PID Controller,只要适当调整P,I和D的参数,就可以到达目标位置,具体如下图所示;
隆哥为了最短时间内到达目标位置,进行了不断的尝试,分别出现了以下几种情况;
- 跑得太快,最终导致冲过了目标位置还得往回跑;
- 跑得太慢,最终导致到达目标位置所用时间太长;
经过不断的尝试,终于找到了最佳的方式,其过程大概如下图所示;

这里依然举一个不是很恰当的比喻;
- 第一步:得到与目标位置的距离偏差(比如最开始是10米,后面会逐渐变小);
- 第二步:根据误差,预估需要多少速度,如何估算呢,看下面几步;
P比例则是给定一个速度的大致范围,满足下面这个公式;
Kp∗e(t)
因此比例作用相当于某一时刻的偏差(err)与比例系数Kp的乘积,具体如下所示;
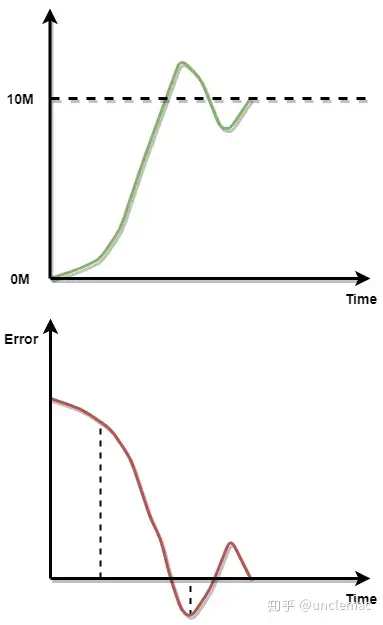
绿色线为上述例子中从初始位置到目标位置的距离变化; 红色线为上述例子中从初始位置到目标位置的偏差变化,两者为互补的关系;
I积分则是误差在一定时间内的和,满足以下公式;
Ki∫0te(t)dt
如下图所示;
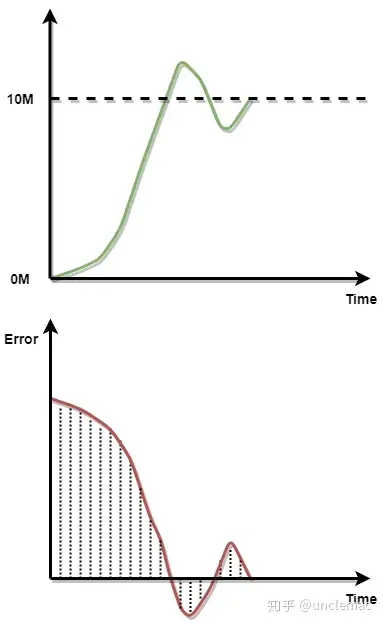
红色曲线阴影部分面积即为积分作用的结果,其不断累积的误差,最终乘以积分系数Ki就得到了积分部分的输出;
D微分则是误差变化曲线某处的导数,或者说是某一点的斜率,因此这里需要引入微分;
Kdde(t)dt
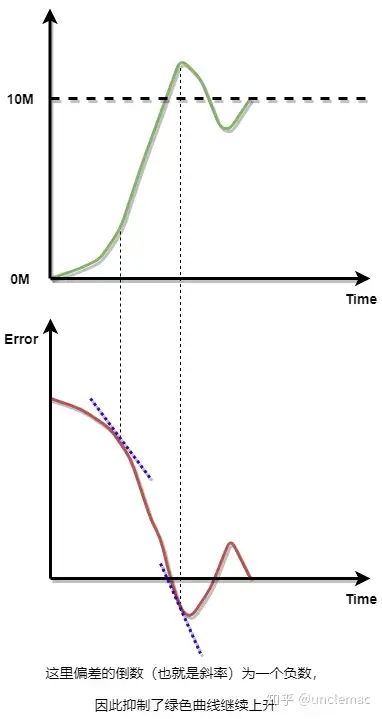
从图中可知,当偏差变化过快,微分环节会输出较大的负数,作为抑制输出继续上升,从而抑制过冲。
综上,,,Kp,Ki,Kd,分别增加其中一项参数会对系统造成的影响总结如下表所示;

4.2 理论基础
上面讲了这么多,无非是为了初步理解PID在负反馈系统中的调节作用,下面开始推导一下算法实现的具体过程;PID控制器的系统框图如下所示;
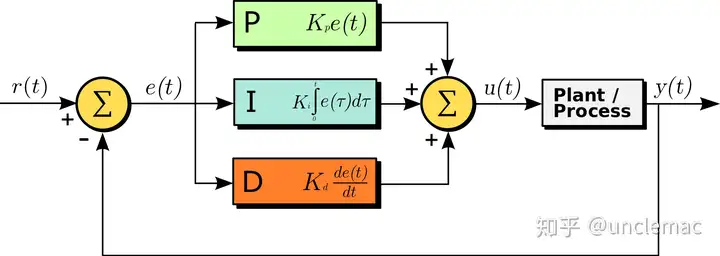
因此不难得出输入e(t)和输出u(t)的关系;

Kp是比例增益; Ki是积分增益; Kd是微分增益;
4.3 离散化
在数字系统中进行PID算法控制,需要对上述算法进行离散化;假设系统采样时间为Δt 则将输入e(t)序列化得到;

4.4 伪算法
这里简单总结一下位置式PID实现的伪算法;
previous_error := 0 //上一次偏差
integral := 0 //积分和
//循环
//采样周期为dt
loop:
//setpoint 设定值
//measured_value 反馈值
error := setpoint − measured_value //计算得到偏差
integral := integral + error × dt //计算得到积分累加和
derivative := (error − previous_error) / dt //计算得到微分
output := Kp × error + Ki × integral + Kd × derivative //计算得到PID输出
previous_error := error //保存当前偏差为下一次采样时所需要的历史偏差
wait(dt) //等待下一次采用
goto loop
对于一些简单的应用,如温控、压力控,dt时间通常可简单地将其置为单位时间1就行,此时公式就更简化了。
5 C++实现
这里是位置式PID算法的C语言实现;
pid.cpp
#ifndef _PID_SOURCE_
#define _PID_SOURCE_
#include <iostream>
#include <cmath>
#include "pid.chh"
using namespace std;
class PIDImpl
{
public:
PIDImpl(double dt, double max, double min, double Kp, double Kd, double Ki);
~PIDImpl();
double calculate(double setpoint, double pv);
private:
double _dt;
double _max;
double _min;
double _Kp;
double _Kd;
double _Ki;
double _pre_error;
double _integral;
};
PID::PID(double dt, double max, double min, double Kp, double Kd, double Ki)
{
pimpl = new PIDImpl(dt, max, min, Kp, Kd, Ki);
}
double PID::calculate(double setpoint, double pv)
{
return pimpl->calculate(setpoint, pv);
}
PID::~PID()
{
delete pimpl;
}
/**
* Implementation
*/
PIDImpl::PIDImpl(double dt, double max, double min, double Kp, double Kd, double Ki):
_dt(dt),
_max(max),
_min(min),
_Kp(Kp),
_Kd(Kd),
_Ki(Ki),
_pre_error(0),
_integral(0)
{
}
double PIDImpl::calculate(double setpoint, double pv)
{
const float intergral_max_value = 1000; //积分限幅值大小,调试时确定
//计算当前误差
double cur_error = setpoint - pv;
//计算比例值
double Pout = _Kp * cur_error;
//计算积分值(考虑积分限幅)
_integral += cur_error * _dt; //累计误差
if (_integral > intergral_max_value)
_integral = intergral_max_value;
else if (_integral < -intergral_max_value)
_integral = -intergral_max_value;
double Iout = _Ki * _integral;
//计算微分值
double derivative = (cur_error - _pre_error) / _dt;
double Dout = _Kd * derivative;
//计算PID输出结果
double output = Pout + Iout + Dout;
//输出限幅
if (output > _max)
output = _max;
else if (output < _min)
output = _min;
//保存当前误差值,该值将作为下一次PID计算的上一次误差值
_pre_error = cur_error;
return output;
}
PIDImpl::~PIDImpl()
{
}
#endif
pid.h
#ifndef _PID_H_
#define _PID_H_
class PIDImpl;
class PID
{
public:
// Kp - proportional gain
// Ki - Integral gain
// Kd - derivative gain
// dt - loop interval time
// max - maximum value of manipulated variable
// min - minimum value of manipulated variable
PID( double dt, double max, double min, double Kp, double Kd, double Ki );
// Returns the manipulated variable given a setpoint and current process value
double calculate( double setpoint, double pv );
~PID();
private:
PIDImpl *pimpl;
};
#endif
main.cpp
#include "pid.chh"
#include <stdio.h>
int main()
{
PID pid = PID(0.1, 100, -100, 0.4, 0.01, 0.5);
double val = 500;
for (int i = 0; i < 100; i++)
{
double inc = pid.calculate(0, val);
printf("[%04d] val:% 7.6f inc:% 7.6f\n", i, val, inc);
val += inc;
}
return 0;
}
编译并测试:
# To compile example code: g++ main.cpp pid.cpp -o main
./main
测试结果如下:(注:PID值的选取非常重要,不同的PID值,逼近目标值所需的计数次数会不同)
dade@ubuntu:~/Desktop/PID$ g++ main.cpp pid.cpp -o main dade@ubuntu:~/Desktop/PID$ ./main [0000] val: 500.000000 inc:-100.000000 [0001] val: 400.000000 inc:-100.000000 [0002] val: 300.000000 inc:-100.000000 [0003] val: 200.000000 inc:-100.000000 [0004] val: 100.000000 inc:-100.000000 [0005] val: 0.000000 inc:-65.000000 [0006] val:-65.000000 inc:-39.250000 [0007] val:-104.250000 inc:-20.912500 [0008] val:-125.162500 inc:-8.123125 [0009] val:-133.285625 inc: 0.511469 [0010] val:-132.774156 inc: 6.082130 [0011] val:-126.692027 inc: 9.426813 [0012] val:-117.265214 inc: 11.184880 [0013] val:-106.080333 inc: 11.839138 [0014] val:-94.241195 inc: 11.750117 [0015] val:-82.491078 inc: 11.183526 [0016] val:-71.307552 inc: 10.332152 [0017] val:-60.975400 inc: 9.333199 [0018] val:-51.642201 inc: 8.281925 [0019] val:-43.360276 inc: 7.242296 [0020] val:-36.117980 inc: 6.255240 [0021] val:-29.862741 inc: 5.344986 [0022] val:-24.517755 inc: 4.523905 [0023] val:-19.993850 inc: 3.796144 [0024] val:-16.197706 inc: 3.160348 [0025] val:-13.037358 inc: 2.611656 [0026] val:-10.425702 inc: 2.143148 [0027] val:-8.282555 inc: 1.746867 [0028] val:-6.535687 inc: 1.414533 [0029] val:-5.121154 inc: 1.138011 [0030] val:-3.983144 inc: 0.909616 [0031] val:-3.073528 inc: 0.722285 [0032] val:-2.351242 inc: 0.569666 [0033] val:-1.781576 inc: 0.446141 [0034] val:-1.335435 inc: 0.346809 [0035] val:-0.988627 inc: 0.267450 [0036] val:-0.721177 inc: 0.204465 [0037] val:-0.516712 inc: 0.154813 [0038] val:-0.361899 inc: 0.115948 [0039] val:-0.245952 inc: 0.085753 [0040] val:-0.160199 inc: 0.062481 [0041] val:-0.097718 inc: 0.044702 [0042] val:-0.053016 inc: 0.031250 [0043] val:-0.021766 inc: 0.021183 [0044] val:-0.000583 inc: 0.013746 [0045] val: 0.013163 inc: 0.008333 [0046] val: 0.021496 inc: 0.004466 [0047] val: 0.025962 inc: 0.001768 [0048] val: 0.027731 inc:-0.000056 [0049] val: 0.027675 inc:-0.001235 [0050] val: 0.026440 inc:-0.001945 [0051] val: 0.024495 inc:-0.002321 [0052] val: 0.022175 inc:-0.002464 [0053] val: 0.019711 inc:-0.002449 [0054] val: 0.017262 inc:-0.002334 [0055] val: 0.014927 inc:-0.002158 [0056] val: 0.012769 inc:-0.001951 [0057] val: 0.010818 inc:-0.001732 [0058] val: 0.009086 inc:-0.001516 [0059] val: 0.007570 inc:-0.001309 [0060] val: 0.006261 inc:-0.001119 [0061] val: 0.005141 inc:-0.000948 [0062] val: 0.004194 inc:-0.000795 [0063] val: 0.003398 inc:-0.000662 [0064] val: 0.002736 inc:-0.000548 [0065] val: 0.002188 inc:-0.000449 [0066] val: 0.001739 inc:-0.000366 [0067] val: 0.001372 inc:-0.000297 [0068] val: 0.001076 inc:-0.000239 [0069] val: 0.000837 inc:-0.000191 [0070] val: 0.000646 inc:-0.000152 [0071] val: 0.000494 inc:-0.000120 [0072] val: 0.000375 inc:-0.000094 [0073] val: 0.000281 inc:-0.000073 [0074] val: 0.000208 inc:-0.000056 [0075] val: 0.000152 inc:-0.000043 [0076] val: 0.000109 inc:-0.000033 [0077] val: 0.000076 inc:-0.000024 [0078] val: 0.000052 inc:-0.000018 [0079] val: 0.000034 inc:-0.000013 [0080] val: 0.000021 inc:-0.000009 [0081] val: 0.000011 inc:-0.000007 [0082] val: 0.000005 inc:-0.000004 [0083] val: 0.000000 inc:-0.000003 [0084] val:-0.000003 inc:-0.000002 [0085] val:-0.000004 inc:-0.000001 [0086] val:-0.000005 inc:-0.000000 [0087] val:-0.000006 inc: 0.000000 [0088] val:-0.000006 inc: 0.000000 [0089] val:-0.000006 inc: 0.000000 [0090] val:-0.000005 inc: 0.000000 [0091] val:-0.000005 inc: 0.000001 [0092] val:-0.000004 inc: 0.000001 [0093] val:-0.000004 inc: 0.000000 [0094] val:-0.000003 inc: 0.000000 [0095] val:-0.000003 inc: 0.000000 [0096] val:-0.000002 inc: 0.000000 [0097] val:-0.000002 inc: 0.000000 [0098] val:-0.000002 inc: 0.000000 [0099] val:-0.000001 inc: 0.000000
posted on 2022-12-22 14:27 tdyizhen1314 阅读(871) 评论(0) 编辑 收藏 举报

