

(笔记)(3)AMCL包源码分析 | 输入与map文件夹
AMCL包从外界接收进来的就只有一张2D栅格地图(物理形式为:一张图片)。这张图片可以是PGM格式,也可以是JPG格式。不管是什么格式,先进入AMCL包的map文件夹里的相关函数处理,解析出这张图片上所包含的信息。
 图1. AMCL包map文件夹展开
图1. AMCL包map文件夹展开
1.栅格地图定义
如图2所示,直观地来看这张作为AMCL包输入的图片,灰色的地方是未知区域,白色的地方是可通行区域,黑色的边框是不可通行区域。从栅格地图的角度来描述,一个栅格单元的占据状态描述,-1表示空闲,0表示未知,+1表示占据。
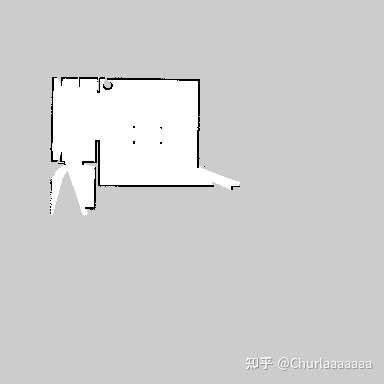 图2. 一张2D栅格地图
图2. 一张2D栅格地图
在map.h中定义一个map_t结构体来表示一张栅格地图的数据结构。其中定义了地图的原点,尺寸,基本单元,跟似然域有关的最大占据距离,代码如下:
// Description for a map 描述一张栅格地图
typedef struct
{
//地图原点
// Map origin; the map is a viewport onto a conceptual larger map.
double origin_x, origin_y;
//地图分辨率
// Map scale (m/cell)
double scale;
//地图尺寸:长宽
// Map dimensions (number of cells)
int size_x, size_y;
//地图基本单元,视为一个栅格
// The map data, stored as a grid
map_cell_t *cells;
//跟似然域有关的最大占据距离
// Max distance at which we care about obstacles, for constructing
// likelihood field
double max_occ_dist;
} map_t;关于栅格地图的基本单元-栅格单元,也定义一个map_cell_t结构体来表示。其中定义里栅格单元的占据状态occ_state,以及该栅格单元到最近呈现被占据状态的栅格单元的距离occ_dist。
// Description for a single map cell.描述单个栅格单元
typedef struct
{
//该栅格单元的占据状态,-1表示空闲,0表示未知,+1表示占据
// Occupancy state (-1 = free, 0 = unknown, +1 = occ)
int occ_state;
//该栅格单元到最近呈现被占据状态的栅格单元的距离
// Distance to the nearest occupied cell
double occ_dist;
// Wifi levels
//int wifi_levels[MAP_WIFI_MAX_LEVELS];
} map_cell_t;2.利用坐标系转换查找栅格单元
那怎么能将一张图片映射到栅格地图,甚至细致到能读取栅格地图中每个栅格单元的占据状态呢?如图3所示为 栅格地图坐标系下栅格单元的序号index与栅格单元的坐标(i,j)对应关系。
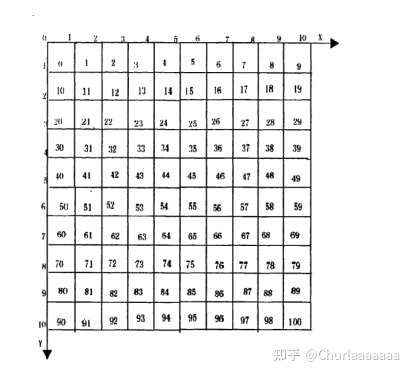 图3. 栅格地图坐标系下栅格单元的序号index与栅格单元的坐标(i,j)对应关系
图3. 栅格地图坐标系下栅格单元的序号index与栅格单元的坐标(i,j)对应关系
要是可以的话,能从世界坐标系下的坐标(x,y)转换到map坐标系下的坐标(i,j),再将map坐标系下的坐标(i,j)转换成栅格单元的序号,那可真是太好了,那样就能直捣黄龙地找到我们想要的栅格单元,对它进行小小的改造。
Dicho y hecho !(说做就做!)
首先,将世界坐标(世界坐标系下的x,y)转换成地图坐标(map坐标系下的i,j):
公式部分:
i=(floor((x−map−>origin−x)/map−>scale+0.5)+map−>size−x/2)
j=(floor((y−map−>origin−y)/map−>scale+0.5)+map−>size−y/2)
代码部分:
// Convert from world coords to map coords
#define MAP_GXWX(map, x) (floor((x - map->origin_x) / map->scale + 0.5) + map->size_x / 2)
#define MAP_GYWY(map, y) (floor((y - map->origin_y) / map->scale + 0.5) + map->size_y / 2)其次,在给定地图坐标(map坐标系下的i,j)转换成栅格单元的序号index:
公式部分:index=i+j∗map−>size−x;
代码部分:
// Compute the cell index for the given map coords.
#define MAP_INDEX(map, i, j) ((i) + (j) * map->size_x)那么,怎么将地图坐标(map上的i,j)转换成世界坐标(世界坐标系下的x,y)呢?
公式部分:
x=map−>origin−x+((i)−map−>size−x/2)∗map−>scale)
y=map−>origin−y+((j)−map−>size−y/2)∗map−>scale)
代码部分:
// Convert from map coords to world coords
#define MAP_WXGX(map, i) (map->origin_x + ((i) - map->size_x / 2) * map->scale)
#define MAP_WYGY(map, j) (map->origin_y + ((j) - map->size_y / 2) * map->scale)在map_store.cpp中实现了读取一张图片到解析出栅格单元的一系列具体操作,如下面的代码所示:
// Load an occupancy grid 加载占据栅格,输入为map_t格式,文件,地图的分辨率等
int map_load_occ(map_t *map, const char *filename, double scale, int negate)
{
FILE *file;
char magic[3];
int i, j;
int ch, occ;
int width, height, depth;
map_cell_t *cell;
// Open file
file = fopen(filename, "r");
if (file == NULL)
{
fprintf(stderr, "%s: %s\n", strerror(errno), filename);
return -1;
}
// Read ppm header
if ((fscanf(file, "%2s \n", magic) != 1) || (strcmp(magic, "P5") != 0))
{
//PGM格式的图片,其实就是已经存在的栅格地图
fprintf(stderr, "incorrect image format; must be PGM/binary");
fclose(file);
return -1;
}
// Ignore comments
while ((ch = fgetc(file)) == '#')
while (fgetc(file) != '\n');
ungetc(ch, file);
// Read image dimensions
if(fscanf(file, " %d %d \n %d \n", &width, &height, &depth) != 3)
{
fprintf(stderr, "Failed ot read image dimensions");
return -1;
}
// Allocate space in the map
if (map->cells == NULL)
{
map->scale = scale;
map->size_x = width;
map->size_y = height;
//根据传入地图的长宽,创建map_t格式下map的size大小
map->cells = calloc(width * height, sizeof(map->cells[0]));
}
else
{
if (width != map->size_x || height != map->size_y)
{
//PLAYER_ERROR("map dimensions are inconsistent with prior map dimensions");
return -1;
}
}
// Read in the image 读取这张图片
for (j = height - 1; j >= 0; j--)
{
for (i = 0; i < width; i++)
{
/* 关于fgetc()函数
在文件内部有一个位置指针,用来指向当前读写到的位置,也就是读写到第几个字节。
在文件打开时,该指针总是指向文件的第一个字节。使用 fgetc() 函数后,
该指针会向后移动一个字节,所以可以连续多次使用 fgetc() 读取多个字符。
*/
//从文件里读取一个字符,并保存到变量ch中
ch = fgetc(file);
// Black-on-white images
if (!negate)
{
if (ch < depth / 4)
occ = +1;
else if (ch > 3 * depth / 4)
occ = -1;
else
occ = 0;
}
// White-on-black images
else
{
if (ch < depth / 4)
occ = -1;
else if (ch > 3 * depth / 4)
occ = +1;
else
occ = 0;
}
if (!MAP_VALID(map, i, j))
continue;
//栅格单元
cell = map->cells + MAP_INDEX(map, i, j);
//栅格单元的状态填充
cell->occ_state = occ;
}
}
fclose(file);
return 0;
}在map.cpp中实现了获取指定点(世界坐标系下的坐标x,y,a)的栅格单元cell的操作,如下代码所示。
//获取指定点的栅格
// Get the cell at the given point
map_cell_t *map_get_cell(map_t *map, double ox, double oy, double oa)
{
int i, j;
map_cell_t *cell;
i = MAP_GXWX(map, ox);
j = MAP_GYWY(map, oy);
if (!MAP_VALID(map, i, j))
return NULL;
cell = map->cells + MAP_INDEX(map, i, j);
return cell;
}那么完成了从一张图片到栅格单元的一系列操作,还要干点什么呢?
3.栅格单元到最近occupied栅格单元的距离计算:Bresenham画线法
我们接着来聊聊栅格单元到最近呈现被占据状态的栅格单元的距离occ_dist吧。毕竟这才是我们拿到地图,处理地图信息之后的目的。很显然,计算机不会从一张地图上直接读取到这个occ_dist,肯定得想个办法才行。这时候我们记起了Bresenham画线法。
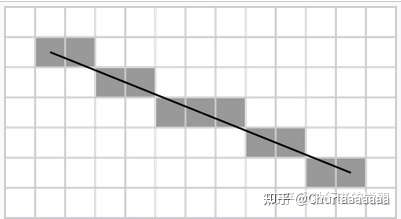 图4.Bresenham画线法
图4.Bresenham画线法
在AMCL包map文件夹下的map_range.cpp具体实现了这个过程。
//从地图里提取单个距离
// Extract a single range reading from the map. Unknown cells and/or
// out-of-bound cells are treated as occupied, which makes it easy to
// use Stage bitmap files.
//传入地图,世界坐标系下坐标(x,y,a)
double map_calc_range(map_t *map, double ox, double oy, double oa, double max_range)
{
// Bresenham raytracing
int x0,x1,y0,y1;
int x,y;
int xstep, ystep;
char steep;
int tmp;
int deltax, deltay, error, deltaerr;
x0 = MAP_GXWX(map,ox);//世界坐标系下的转换成map坐标系下的i,j
y0 = MAP_GYWY(map,oy);
x1 = MAP_GXWX(map,ox + max_range * cos(oa));//世界坐标系下的转换成map坐标系下的i,j
y1 = MAP_GYWY(map,oy + max_range * sin(oa));
if(abs(y1-y0) > abs(x1-x0))
steep = 1;
else
steep = 0;
if(steep)
{
tmp = x0;
x0 = y0;
y0 = tmp;
tmp = x1;
x1 = y1;
y1 = tmp;
}
deltax = abs(x1-x0);
deltay = abs(y1-y0);
error = 0;
deltaerr = deltay;
x = x0;
y = y0;
if(x0 < x1)
xstep = 1;
else
xstep = -1;
if(y0 < y1)
ystep = 1;
else
ystep = -1;
if(steep)
{
if(!MAP_VALID(map,y,x) || map->cells[MAP_INDEX(map,y,x)].occ_state > -1)
return sqrt((x-x0)*(x-x0) + (y-y0)*(y-y0)) * map->scale;
}
else
{
if(!MAP_VALID(map,x,y) || map->cells[MAP_INDEX(map,x,y)].occ_state > -1)
return sqrt((x-x0)*(x-x0) + (y-y0)*(y-y0)) * map->scale;
}
while(x != (x1 + xstep * 1))
{
x += xstep;
error += deltaerr;
if(2*error >= deltax)
{
y += ystep;
error -= deltax;
}
if(steep)
{
if(!MAP_VALID(map,y,x) || map->cells[MAP_INDEX(map,y,x)].occ_state > -1)
return sqrt((x-x0)*(x-x0) + (y-y0)*(y-y0)) * map->scale;
}
else
{
if(!MAP_VALID(map,x,y) || map->cells[MAP_INDEX(map,x,y)].occ_state > -1)
return sqrt((x-x0)*(x-x0) + (y-y0)*(y-y0)) * map->scale;
}
}
return max_range;
}通过上面的操作,每个栅格单元cell喜气洋洋手握一个距离最近被占据栅格occupied_cell的距离occ_dist。我们要对这些栅格单元们cells进行管理一下,这就进入了map_cspace.cpp。上面提到,在定义地图结构体时,有定义一个max_occ_dist,这个跟似然域有关,似然域跟什么有关呢?跟传感器的观测模型有关系。
4.使用优先队列对栅格单元进行管理
//map结构体截取部分:max_occ_dist
//跟似然域有关的最大占据距离
// Max distance at which we care about obstacles, for constructing
// likelihood field
double max_occ_dist;现在直接贴map_cspace.cpp的代码,在代码块里加入一些说明应该能理解得差不多了。
//定义一个CellData类
class CellData
{
public:
map_t* map_;
unsigned int i_, j_;
unsigned int src_i_, src_j_;
};
//定义一个CachedDistanceMap类
class CachedDistanceMap
{
public:
CachedDistanceMap(double scale, double max_dist) :
distances_(NULL), scale_(scale), max_dist_(max_dist) //构造函数,初始化列表
{
cell_radius_ = max_dist / scale;
distances_ = new double *[cell_radius_+2];
for(int i=0; i<=cell_radius_+1; i++)
{
distances_[i] = new double[cell_radius_+2];
for(int j=0; j<=cell_radius_+1; j++)
{
distances_[i][j] = sqrt(i*i + j*j);
}
}
}
~CachedDistanceMap()//析构函数
{
if(distances_)
{
for(int i=0; i<=cell_radius_+1; i++)
delete[] distances_[i];
delete[] distances_;
}
}
double** distances_;//二维指针数组
double scale_;
double max_dist_;
int cell_radius_;
};
// 重载运算符 <;用于比较两个栅格单元
bool operator<(const CellData& a, const CellData& b)
{
return a.map_->cells[MAP_INDEX(a.map_, a.i_, a.j_)].occ_dist > a.map_->cells[MAP_INDEX(b.map_, b.i_, b.j_)].occ_dist;
}
CachedDistanceMap* get_distance_map(double scale, double max_dist)
{
static CachedDistanceMap* cdm = NULL;
if(!cdm || (cdm->scale_ != scale) || (cdm->max_dist_ != max_dist))
{
if(cdm)
delete cdm;
cdm = new CachedDistanceMap(scale, max_dist);//重新在自由存储区分配一块内存
}
return cdm;
}
//使用优先队列pripority_queue 对栅格单元进行管理
void enqueue(map_t* map, int i, int j,
int src_i, int src_j,
std::priority_queue<CellData>& Q,
CachedDistanceMap* cdm,
unsigned char* marked)
{
if(marked[MAP_INDEX(map, i, j)])
return;
int di = abs(i - src_i);
int dj = abs(j - src_j);
double distance = cdm->distances_[di][dj];
if(distance > cdm->cell_radius_)
return;
//如何填充map里的栅格单元的occ_dist?如下:
map->cells[MAP_INDEX(map, i, j)].occ_dist = distance * map->scale;
CellData cell;
cell.map_ = map;
cell.i_ = i;
cell.j_ = j;
cell.src_i_ = src_i;
cell.src_j_ = src_j;
Q.push(cell);
marked[MAP_INDEX(map, i, j)] = 1;
}
//更新cspace(configuration space)的距离值
// Update the cspace distance values
void map_update_cspace(map_t *map, double max_occ_dist)
{
unsigned char* marked;
std::priority_queue<CellData> Q;//定义一个优先队列priority_queue
marked = new unsigned char[map->size_x*map->size_y];//在自由存储区里重新分配内存
memset(marked, 0, sizeof(unsigned char) * map->size_x*map->size_y);
//跟似然域有关的地图的最大占据距离
map->max_occ_dist = max_occ_dist;
CachedDistanceMap* cdm = get_distance_map(map->scale, map->max_occ_dist);
// Enqueue all the obstacle cells 排列所有occupied 栅格
CellData cell;
cell.map_ = map;
for(int i=0; i<map->size_x; i++)
{
cell.src_i_ = cell.i_ = i;
//根据栅格单元的占据状态进行判断,从而对栅格单元的occ_dist进行更新
for(int j=0; j<map->size_y; j++)
{
if(map->cells[MAP_INDEX(map, i, j)].occ_state == +1)
{
map->cells[MAP_INDEX(map, i, j)].occ_dist = 0.0;
cell.src_j_ = cell.j_ = j;
marked[MAP_INDEX(map, i, j)] = 1;
Q.push(cell);
}
else
map->cells[MAP_INDEX(map, i, j)].occ_dist = max_occ_dist;
}
}
while(!Q.empty())
{
CellData current_cell = Q.top();
if(current_cell.i_ > 0)
enqueue(map, current_cell.i_-1, current_cell.j_,
current_cell.src_i_, current_cell.src_j_,
Q, cdm, marked);
if(current_cell.j_ > 0)
enqueue(map, current_cell.i_, current_cell.j_-1,
current_cell.src_i_, current_cell.src_j_,
Q, cdm, marked);
if((int)current_cell.i_ < map->size_x - 1)
enqueue(map, current_cell.i_+1, current_cell.j_,
current_cell.src_i_, current_cell.src_j_,
Q, cdm, marked);
if((int)current_cell.j_ < map->size_y - 1)
enqueue(map, current_cell.i_, current_cell.j_+1,
current_cell.src_i_, current_cell.src_j_,
Q, cdm, marked);
Q.pop();
}
delete[] marked;
}

posted on 2022-09-14 13:51 tdyizhen1314 阅读(404) 评论(0) 编辑 收藏 举报


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 阿里最新开源QwQ-32B,效果媲美deepseek-r1满血版,部署成本又又又降低了!
· 开源Multi-agent AI智能体框架aevatar.ai,欢迎大家贡献代码
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· AI技术革命,工作效率10个最佳AI工具