四元数基础(二)
有了一些四元数的基础后,我们再继续挖点东西出来。这一节,我们来讨论一下四元数的指数映射,对数映射,球面插值等内容。
指数映射
首先,我们定义一般四元数的指数映射为:$$e^{\mathbf{q}} = \sum_{k=0}^{\infty}{\frac{1}{k!}\mathbf{q}^k}$$ 其中, $\mathbf{q}^k$表示$k$个相同四元数$\mathbf{q}$的 $\otimes$ 累乘。不难发现,一个四元数的指数映射仍然是一个四元数。有了这个定义后,我们来关注一下纯虚四元数的指数映射,令 $\mathbf{v} = v_x i + v_y j + v_z k$ 为一个纯虚四元数,我们总可以把一个纯虚四元数写成如下形式:$$\mathbf{v} = \theta \mathbf{u}$$ 其中,$\mathbf{u}$ 是单位纯虚四元数,而 $\theta = \| \mathbf{v} \| \in \mathbb{R}$。 接着,我们把这个纯虚四元数做一个指数映射: $$e^{\mathbf{v}} = e^{\theta \mathbf{u}} = \left(1-\frac{\theta ^ 2}{2!} + \frac{\theta ^4}{4!} + ...\right) + \left( \mathbf{u}\theta - \mathbf{u} \frac{\theta^3}{3!} + \mathbf{u} \frac{\theta^5}{5!} + ... \right)$$ 需要说明一下的是,上式第二个大括号中简洁的结果利用了 $\mathbf{u} \otimes \mathbf{u} = -1$ 这一结果。两个大括号内的内容,咋一看怎么都非常熟悉。没错!他们刚好分别是$\cos \theta$ 和 $\sin \theta$ 的泰勒展开式。因此,一个纯虚四元数的指数映射结果变得就非常简洁了: $$e^{\mathbf{v}} = e^{\theta \mathbf{u}} = \cos \theta + \mathbf{u} \sin \theta = \left [ \begin{array} {*{20}{c}} \cos \theta \\ \mathbf{u} \sin \theta \end{array} \right] = \left [ \begin{array} {*{20}{c}} \cos \theta \\ u_x \sin \theta \\ u_y \sin \theta \\ u_z \sin \theta \end{array} \right] $$ 如果你学过复变函数,那么这个式子的形式你应该会非常眼熟,因为它和欧拉公式 $e^{i\theta} = \cos \theta + i \sin \theta$ 简直太像了! 注意到, $\| e^{\mathbf{v}} \| = \cos^2 \theta +\sin ^2 \theta = 1$。 因此,一个纯虚四元数经过指数映射后得到的是单位四元数!提到单位四元数,你脑中必须想到的就是 “旋转” 二字。另外,我们知道对于单位四元数来说,它的逆和共轭是相等的,因此:$$e^{-\mathbf{v}} = \left( e^{\mathbf{v}} \right) ^ *$$
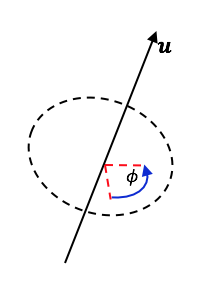
现在,让我们回到旋转这个正题上来,看了这么多公式,你一定困惑:四元数如此抽象,如果给了一个单位四元数,我怎么知道它朝着什么方向转动了多少角度?既然要直观,我们首先把最直观的旋转向量搬出来。旋转向量直观的理解就是物体绕着一个固定轴旋转了多少角度,那我们记这个固定轴的单位方向向量为 $\mathbf{u}$ (三维向量,两个自由度),转动角度为$\phi$ (标量,一个自由度)。那么,一个旋转就可以用 $\phi \mathbf{u}$ 来表达。这样够直观了吧?还不够?来个图:
好,假设你现在理解了旋转向量。那接下来你就可能会问:单位四元数和旋转向量有什么关系呢?我把结果直接列在这里:$$\mathbf{q} = \text{Exp} (\phi \mathbf{u}) = e^{\phi \mathbf{u} / 2} = \cos \frac{\phi}{2} + \mathbf{u} \sin \frac{\phi}{2} = \left [ \begin{array} {*{20}{c}} \cos (\phi /2 ) \\ \mathbf{u} \sin (\phi/2) \end{array} \right] = \left [ \begin{array} {*{20}{c}} \cos \frac{\phi}{2} \\ u_x \sin \frac{\phi}{2} \\ u_y \sin \frac{\phi}{2} \\ u_z \sin \frac{\phi}{2} \end{array} \right] $$
Note: 这里引入了记号 $\text{Exp}(\cdot)$,它和 $\exp{(\cdot)}$ 的关系是:$$\text{Exp}(\mathbf{v}) =\exp(\mathbf{v}/2) = e^{\mathbf{v}/2} $$ 两者其实并无本质无别,只是映射向量有没有除以2这一区别,但不论有没有除以2,三维向量用四元数来表示的话,它都是一个纯虚的四元数。因此,经过指数映射后,我们会得到一个单位四元数。
反过来,已知一个抽象的单位四元数 $\mathbf{q} = q_w + \mathbf{q}_v$,去得到对应的旋转向量就比较简单了:
\begin{equation*}
\left\{
\begin{array}{lr}
\phi = 2\arccos(q_w) & \\
\mathbf{u} = \mathbf{q}_v / \sin (\phi / 2)
\end{array}
\right.
\end{equation*}
再来看一个有趣的现象,如果旋转角度 $\phi$ 加上 $2\pi$,旋转本身并没有变化,但是对应的四元数变成了 $-\mathbf{q}$。因此,任意两个互为相反数的单位四元数均可以表示同一个旋转。
现在,假设我们有一个三维空间点 $\mathbf{x}$,如果我们绕着 $\mathbf{u}$ 轴旋转 $\phi$ 角度,那么旋转后得到的点 $\mathbf{x}'$ 可以表达为: $$\mathbf{x}' = \mathbf{q} \otimes \mathbf{x} \otimes \mathbf{q}^*$$ 其中,$\mathbf{q} = \text{Exp}(\phi \mathbf{u})$,而三维空间点 $\mathbf{x}$ 在上式中被写成了纯虚四元数形式:$$\mathbf{x} = xi+yj+zk = \left [ \begin{array} {*{20}{c}} 0 \\ \mathbf{x} \end{array} \right] \in \mathbb{H}_p$$ 为了方便记忆,我们姑且叫这个公式为三明治公式吧!请自行验证,三明治公式的结果一定是一个纯虚的四元数。否则,一个三维空间点或者说矢量经过旋转都不是一个点或者说矢量了,你说对么?
对数映射
对数运算就是指数运算的逆运算。因此,把一个单位四元数 $\mathbf{q} = \cos (\phi /2) + \mathbf{u} \sin (\phi /2)$ (一个单位四元数总可以写成这种形式,这里为了让式子意义更加明确,把单位四元数用了它对应的旋转向量的轴 $\mathbf{u}$ 和角度 $\phi$ 来进行表达)进行对数映射,我们可以得到一个纯虚四元数,或者说一个3维向量:$$ \log(\mathbf{q}) = \log (\cos (\phi /2) + \mathbf{u} \sin (\phi /2)) = \log (e^{\mathbf{u} \phi/2}) = \mathbf{u} \phi/2$$ 为了和指数映射的 $\text{Exp}(\cdot)$ 保持一致,这里引入对数映射 $\text{Log}(\cdot)$,它和 $\log(\cdot)$的关系是: $$\text{Log}(\mathbf{q}) = 2\log{\mathbf{q}} = 2 \log (e^{\mathbf{u} \phi/2}) = \mathbf{u} \phi$$
插值
- 方法一
这里讨论的插值仅仅以单位四元数为对象。首先搞清楚问题是什么:给定两个旋转 $\mathbf{q}_0$ 和 $\mathbf{q}_1$ (再次强调:这必须是单位四元数!),我们期望当参数 $t$ 从0变到1的时候,我们找到的旋转也能“线性平稳”地从$\mathbf{q}_0$过渡到$\mathbf{q}_1$。假设我们记这个从$\mathbf{q}_0$到$\mathbf{q}_1$的旋转增量为$\Delta \mathbf{ q}$,使得:$$\mathbf{q}_1 = \mathbf{q}_0 \otimes \Delta \mathbf{q}$$ 对上面的等式,我们两边同时左乘以 $\mathbf{q}_{0}^{*}$,就可以得到:$$\Delta \mathbf{q} = \mathbf{q}_{0}^{*} \otimes \mathbf{q}_1 $$ 假设这个$\Delta \mathbf{ q}$对应的旋转角度为$\Delta \phi$,转轴为$\mathbf{ u}$,我们来看看$(\Delta \mathbf{ q})^t$ 这是个什么鬼?$$(\Delta \mathbf{ q})^t = \text{Exp}(\text{Log}(\Delta \mathbf{ q})^t) = \text{Exp}(t\text{Log}(\Delta \mathbf{ q})) $$ 另一方面,$\text{Log}(\Delta \mathbf{ q}) = \mathbf{u} \Delta \phi$,因此:$$(\Delta \mathbf{ q})^t = \text{Exp}((t\Delta \phi) \mathbf{u})$$ 咦,这刚刚好诶!角度变成了$t\Delta \phi$,当$t$从0变到1的时候,旋转角度能“线性”的过渡。同时,转轴不变,始终都是$\mathbf{u}$,也能满足我们的“平稳”要求。那么,就是它了,给定参数$t \in [0, 1]$,当$\mathbf{q}(t)$ 满足以下形式时,我们找到的旋转能线性平稳地从$\mathbf{q}_0$过渡到$\mathbf{q}_1$:$$\mathbf{q}(t) = \mathbf{q}_0 \otimes (\Delta \mathbf{q})^{t} = \mathbf{q}_0 \otimes (\mathbf{q}_{0}^{*} \otimes \mathbf{q}_1)^t$$ 当$t = 0$时,$\mathbf{q}(t) = \mathbf{q}(0) = \mathbf{q}_0$,当 $t = 1$时,$\mathbf{q}(t) = \mathbf{q}(1) = \mathbf{q}_0 \otimes \mathbf{q}_{0}^{*} \otimes \mathbf{q}_1 = \mathbf{q}_1$,完美!实际使用的话,我们采用下面的形式:$$\mathbf{q}(t) = \mathbf{q}_0 \otimes \left [ \begin{array} {*{20}{c}} \cos (t \Delta \phi /2 ) \\ \mathbf{u} \sin (t \Delta \phi/2) \end{array} \right] $$ 总结一下:这种插值方法需要先计算旋转增量$\Delta \mathbf{ q}$,然后根据它计算所对应的轴 $\mathbf{ u}$ 以及旋转角度 $\Delta \phi$,再做四元数乘法去进行插值。 - 方法二
这里给出另一种插值方法,称为球面插值公式,具体推导这里就不写了,有兴趣可以翻翻资料:$$\mathbf{q}(t) = \mathbf{q}_0 \frac{\sin((1-t)\Delta \theta)}{\sin(\Delta \theta)} + \mathbf{q}_1 \frac{\sin(t\Delta \theta) }{\sin(\Delta \theta)}$$ 其中,$\Delta \theta = \arccos(\mathbf{q}_{0}^{T}\mathbf{q}_1)$。 不难验证当$t = 0$时,$\mathbf{q}(t) = \mathbf{q}(0) = \mathbf{q}_0$,当$t = 1$时,$\mathbf{q}(t) = \mathbf{q}(1) = \mathbf{q}_1$。
代码实例
下面采用Eigen库进行一些实际操练:
1 #include <iostream> 2 #include <Eigen/Dense> 3 4 int main() 5 { 6 //arbitrary quaternion 7 Eigen::Quaterniond Q(1, 3, 2, 5); 8 std::cout << "(" << Q.w() << ", " << Q.x() << ", " << Q.y() << ", " << Q.z() << ")"<< std::endl; 9 std::cout << Q.coeffs().transpose() << std::endl; //real part is at the end 10 std::cout << Q.norm() << std::endl; 11 12 Eigen::Quaterniond P = Q.conjugate(); 13 std::cout << "(" << P.w() << ", " << P.x() << ", " << P.y() << ", " << P.z() << ")"<< std::endl; 14 Q.normalize(); //now can represent a rotation 15 std::cout << "(" << Q.w() << ", " << Q.x() << ", " << Q.y() << ", " << Q.z() << ")"<< std::endl; 16 17 18 19 //rotation quaternion -- unit quaternion 20 double phi = M_PI / 3; //rotation angle 21 Eigen::Vector3d vec(1, 2, 3); //rotation vector 22 vec.normalize(); 23 //method 1: 24 Eigen::Quaterniond q1(cos(phi/2), vec(0) * sin(phi/2), vec(1) * sin(phi /2), vec(2) * sin(phi/2)); 25 //method 2: 26 Eigen::Quaterniond q2(Eigen::AngleAxisd(phi, vec)); //a simple constructor 27 //output 28 std::cout << "(" << q1.w() << ", " << q1.x() << ", " << q1.y() << ", " << q1.z() << ")"<< std::endl; 29 std::cout << "(" << q2.w() << ", " << q2.x() << ", " << q2.y() << ", " << q2.z() << ")"<< std::endl; 30 //for unit quaternion, its inverse equals its conjugate 31 Eigen::Quaterniond qConj = q1.conjugate(); 32 Eigen::Quaterniond qInv = q2.inverse(); 33 std::cout << "(" << qConj.w() << ", " << qConj.x() << ", " << qConj.y() << ", " << qConj.z() << ")"<< std::endl; 34 std::cout << "(" << qInv.w() << ", " << qInv.x() << ", " << qInv.y() << ", " << qInv.z() << ")"<< std::endl; 35 36 //from quaternion to rotation matrix 37 Eigen::Matrix3d R1 = q1.matrix(); 38 Eigen::Matrix3d R2 = q2.toRotationMatrix(); 39 std::cout << "R1: \n" << R1 << std::endl << std::endl; 40 std::cout << "R2: \n" << R2 << std::endl << std::endl; 41 42 43 //quaternion product 44 Eigen::Quaterniond p(2, 3, -1 ,5); 45 Eigen::Quaterniond q(3,-1, 2, 4); 46 p.normalize(); 47 q.normalize(); 48 Eigen::Quaterniond prod1 = p * q; 49 std::cout << "(" << prod1.w() << ", " << prod1.x() << ", " << prod1.y() << ", " << prod1.z() << ")"<< std::endl; 50 //calculate product using formula 51 const double w = p.w() * q.w() - p.x() * q.x() - p.y() * q.y() - p.z() * q.z(); 52 const double x = p.w() * q.x() + p.x() * q.w() + p.y() * q.z() - p.z() * q.y(); 53 const double y = p.w() * q.y() - p.x() * q.z() + p.y() * q.w() + p.z() * q.x(); 54 const double z = p.w() * q.z() + p.x() * q.y() - p.y() * q.x() + p.z() * q.w(); 55 Eigen::Quaterniond prod2(w, x, y, z); 56 std::cout << "(" << prod2.w() << ", " << prod2.x() << ", " << prod2.y() << ", " << prod2.z() << ")"<< std::endl; 57 58 59 std::cout << "prod1---R: \n" << prod1.matrix() << std::endl; 60 std::cout << "p.R * q.R \n" << p.matrix() * q.matrix() << std::endl; 61 62 //rotate a point/vector via quaternion 63 Eigen::Vector3d point(3, 4, 5); 64 Eigen::Quaterniond point_quat(0, point(0), point(1), point(2)); //write into pure quaternion format 65 Eigen::Quaterniond point_quat_rotated = p * point_quat * p.inverse(); 66 std::cout << "\n rotate a point/vector via quaternion: \n"; 67 std::cout << point_quat_rotated.coeffs().transpose() << std::endl; 68 std::cout << p._transformVector(point).transpose() << std::endl; //an alternative way 69 70 //rotate a point/vector via rotation matrix 71 Eigen::Vector3d point_rotated = p.matrix() * point; 72 std::cout << "\n rotate a point/vector via rotation martix: \n"; 73 std::cout << point_rotated.transpose() << std::endl << std::endl; 74 75 76 //Interpolation 77 Eigen::Quaterniond Q0(1, 3.1, 1.9, 4.2); 78 Eigen::Quaterniond Q1(1.3, 2.7, 2.3, 4.1); 79 Q0.normalize(); 80 Q1.normalize(); 81 const double t = 0.5; 82 //Method 1: 83 Eigen::Quaterniond dQ = Q0.inverse() * Q1; 84 const double dPhi = 2 * acos(dQ.w()); //alternatively, Q0.angularDistance(Q1); 85 Eigen::Vector3d u = Eigen::Vector3d(dQ.x(), dQ.y(), dQ.z()) / sin(dPhi * 0.5); 86 Eigen::Quaterniond Qt1 = Q0 * Eigen::Quaterniond(cos(t*dPhi*0.5), 87 u(0)*sin(t*dPhi*0.5), 88 u(1)*sin(t*dPhi*0.5), 89 u(2) * sin(t*dPhi*0.5)); 90 Eigen::Quaterniond Qt2 = Q0 * Eigen::Quaterniond(Eigen::AngleAxisd(dPhi * t, u)); //another way to construct 91 92 std::cout << "Q0: " << Q0.coeffs().transpose() << std::endl; 93 std::cout << "Q1: " << Q1.coeffs().transpose() << std::endl; 94 std::cout << "Q0.5 by method 1-1: " << Qt1.coeffs().transpose() << std::endl; 95 std::cout << "Q0.5 by method 1-2: " << Qt2.coeffs().transpose() << std::endl; 96 97 //Method 2: 98 const double dTheta = acos(Q0.dot(Q1)); //alternatively, acos(Q0.coeffs().transpose() * Q1.coeffs()); 99 const double alpha = sin((1 - t) * dTheta) / sin(dTheta); 100 const double beta = sin(t* dTheta) / sin(dTheta); 101 Eigen::Quaterniond Qt3_1(Q0.w() * alpha, Q0.x() * alpha, 102 Q0.y() * alpha, Q0.z() * alpha); 103 104 Eigen::Quaterniond Qt3_2 (Q1.w() * beta, Q1.x() * beta, 105 Q1.y() * beta, Q1.z() * beta); 106 107 Eigen::Quaterniond Qt3(Qt3_1.w() + Qt3_2.w(), 108 Qt3_1.x() + Qt3_2.x(), 109 Qt3_1.y() + Qt3_2.y(), 110 Qt3_1.z() + Qt3_2.z()); 111 std::cout << "Q0.5 by method 2: " << Qt3.coeffs().transpose() << std::endl; 112 113 //Method 3: call interface 114 Eigen::Quaterniond Qt4 = Q0.slerp(t, Q1); 115 std::cout << "Q0.5 by method 3: " << Qt4.coeffs().transpose() << std::endl; 116 117 return 0; 118 }

 浙公网安备 33010602011771号
浙公网安备 33010602011771号