zynqmp (ultra96-v2)mipi 链接raspberry pi v2.1摄像头模组 一ubuntu16.04实现
petalinux和vivado的工程参考
zynqmp (ultra96-v2)mipi 链接raspberry pi v2.1摄像头模组 一linux+petalinux_rootfs实现
ubuntu16.04的移植参考
移植ubuntu16.04到arm/aarch64
需要做的修改如下:
-
1.修改petalinux的config文件如下
-
2.重新执行petalinux-build
-
3.将petalinux生成的文件系统的/lib/mod* 以及firmware拷贝到ubuntu16.04的同等目录
-
4.将petalinux生成的文件系统的/root目录下的wifi相关的文件拷贝到ubuntu6.04的wifi目录,并修改wifi相关的参数
-
5.上电,此时屏幕上应该有控制台的输出,连接wifi
-
6.执行如下命令
#安装包
apt-get install -y locales dialog
apt-get install console-setup
#执行
dpkg-reconfigure console-setup
dpkg-reconfigure keyboard-configuration
#重启
- 7.github上下载
https://github.com/ikwzm/xf86-video-armsoc-xilinx.git
需在板子或者qemu下执行编译,生成,编译方法看github项目的介绍
xserver-xorg-video-armsoc-xilinx_1.4-2_arm64.deb
拷贝到板子上,并dpkg安装 - 8.安装其他依赖
apt install build-essential pkg-config python python-dev python-setuptools python-wheel python-pip python3 python3-dev python3-setuptools python3-wheel python3-pip python-numpy python3-numpy cmake make
apt install x-window-system-core xorg matchbox-window-manager matchbox-desktop
9..将如下xorg.conf拷贝到/etc/X11/目录,没有该文件则新建
Section "Device"
Identifier "ZynqMP"
Driver "armsoc"
Option "DRI2" "true"
Option "DRI2_PAGE_FLIP" "false"
Option "DRI2_WAIT_VSYNC" "true"
Option "DEBUG" "true"
EndSection
Section "Screen"
Identifier "DefaultScreen"
Device "ZynqMP"
EndSection
- 10.在/etc/init.d中添加matchbox_start.sh并添加如下文件,添加到自动启动(执行update-rc.d matchbox_start.sh defaults 99)
#!/bin/sh
export DISPLAY=:0.0
xinit &
matchbox-window-manager &
- 12.源码交叉编译opencv3.4.1
- 13.将v4l2.ko caminit 以及test拷贝板子上,加入opencv的动态链接路径,
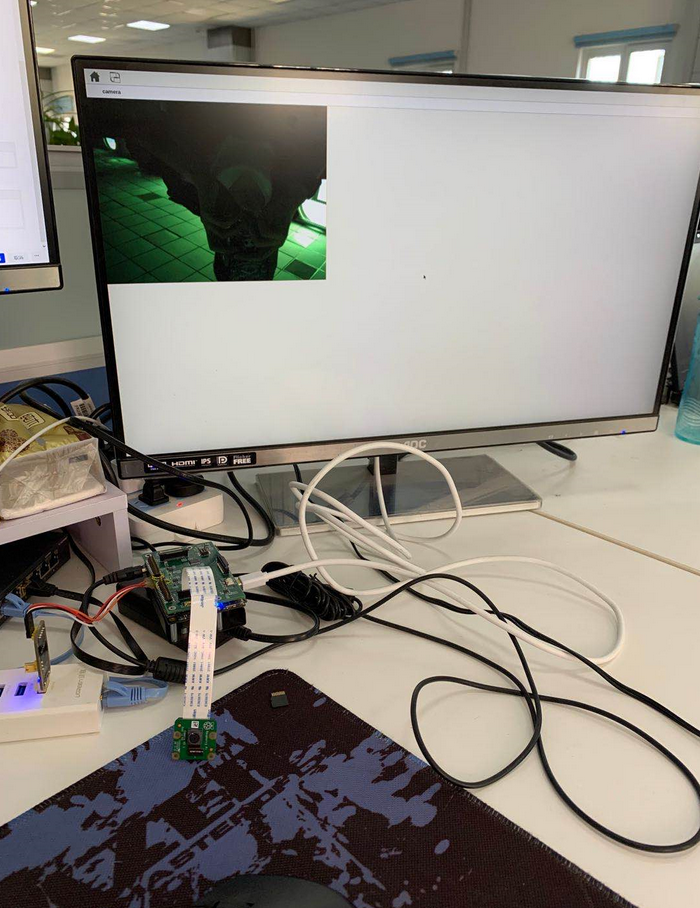
- 14.上电执行insmod v4l2.ko ./caminit
- test

 浙公网安备 33010602011771号
浙公网安备 33010602011771号