
实现车道线检测
当今计算机视觉在我们的日常生活中运用的十分广泛,例如人脸识别、自动驾驶、等等
由于对自动驾驶十分感兴趣,因此就花了一些时间实现了车道线检测
环境
笔者的环境配置如下:
ubuntu 16.04
python3.7
opencv >=4.0
说明:这里的系统以及python的版本都不是固定的,读者使用win10 win7也是可以的
但是python的版本一定要是3.x的版本
第三方库
这里使用的第三方库,是大家比较熟悉的opencv以及numpy
import cv2
import numpy as np
函数
def make_coordinate(image,line_parameters):
slope,intercept=line_parameters
# print(image.shape)
y1=image.shape[0]
y2=int(y1*(3/5))
x1=int((y1-intercept)/slope)
x2 = int((y2 - intercept) / slope)
return np.array([x1,y1,x2,y2])
def average_slope_intercept(image,lines):
left_fit=[]
right_fit=[]
for line in lines:
x1,y1,x2,y2=line.reshape(4)
paraneters=np.polyfit((x1,x2),(y1,y2),1)
slope=paraneters[0]
intercept=paraneters[1]
if slope<0:
left_fit.append((slope,intercept))
else:
right_fit.append((slope,intercept))
left_fit_average=np.average(left_fit,axis=0)
right_fit_average=np.average(right_fit,axis=0)
left_line=make_coordinate(image,left_fit_average)
right_line=make_coordinate(image,right_fit_average)
return np.array([left_line,right_line])
def canny(image):
gray=cv2.cvtColor(image,cv2.COLOR_RGB2GRAY)
blur=cv2.GaussianBlur(gray,(5,5),0)
canny=cv2.Canny(blur,50,150)
return canny
def display_lines(image,lines):
line_image=np.zeros_like(image)
if lines is not None:
for x1,y1,x2,y2 in lines:
# x1,y1,x2,y2=line.reshape(4)
cv2.line(line_image,(x1,y1),(x2,y2),(0,255,0),10)
return line_image
def region_of_interest(image):
height=image.shape[0]
polygons=np.array([
[(200,height),(1100,height),(550,250)]
])
mask=np.zeros_like(image)
cv2.fillPoly(mask,polygons,255)
masked_image=cv2.bitwise_and(image,mask)
return masked_image
测试(图片)
image = cv2.imread("test_image.jpg")
lane_image = np.copy(image)
canny_image=canny(lane_image)
cropped_image=region_of_interest(canny_image)
lines=cv2.HoughLinesP(cropped_image,2,np.pi/180,100,np.array([]),minLineLength=40,maxLineGap=5)
averaged_lines=average_slope_intercept(lane_image,lines)
line_image=display_lines(lane_image,averaged_lines)
combo_image=cv2.addWeighted(lane_image,0.8,line_image,1,1)
cv2.imshow("result",combo_image)
cv2.waitKey(0)
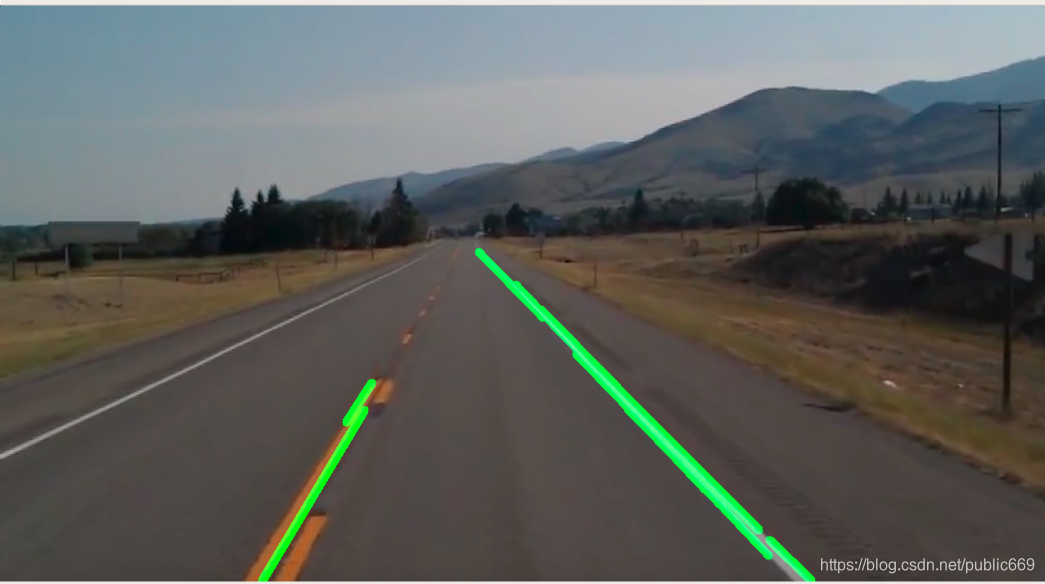
最终的效果如下图所示:
测试(视频)
cap=cv2.VideoCapture("test2.mp4")
while(cap.isOpened()):
_,frame=cap.read()
canny_image = canny(frame)
cropped_image = region_of_interest(canny_image)
lines = cv2.HoughLinesP(cropped_image, 2, np.pi / 180, 100, np.array([]), minLineLength=40, maxLineGap=5)
averaged_lines = average_slope_intercept(frame, lines)
line_image = display_lines(frame, averaged_lines)
combo_image = cv2.addWeighted(frame, 0.8, line_image, 1, 1)
cv2.imshow("result", combo_image)
if cv2.waitKey(1) & 0xFF==ord('q'):
break
cap.release()
cv2.destroyAllWindows()
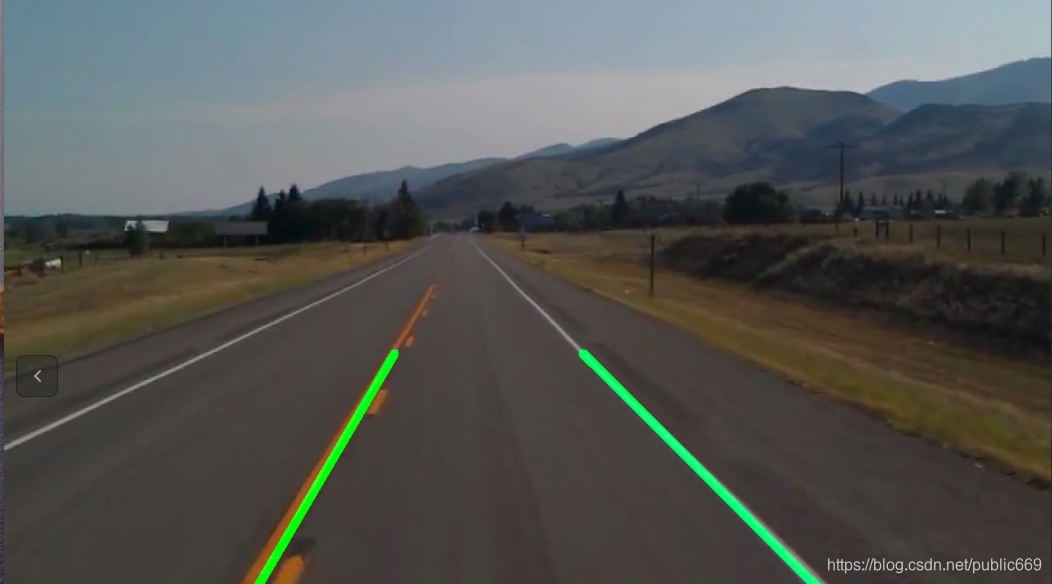
效果如下图所示:
由于笔者能力有限,如有描述不准确的地方还请谅解。
希望大家多动手实践,共同进步。

