
深度学习实战之垃圾分类
垃圾分类,指按一定规定或标准将垃圾分类储存、分类投放和分类搬运,从而转变成公共资源的一系列活动的总称。分类的目的是提高垃圾的资源价值和经济价值,力争物尽其用;然而我们在日常生活中认为对垃圾分类还是有些不知所措的,对干垃圾、湿垃圾……分的不是很清楚,由此我们就想到了使用深度学习的方法进行分类。
简介
本篇博文主要会带领大家进行数据的预处理、网络搭建、模型训练、模型测试
1. 获取数据集
这里笔者已经为大家提供了一个比较完整的数据集,所以大家不必再自己去收集数据了
数据集链接:https://pan.baidu.com/s/1OhA7yQt9evqNIP5CIPjdgw
提取码:Z5A1
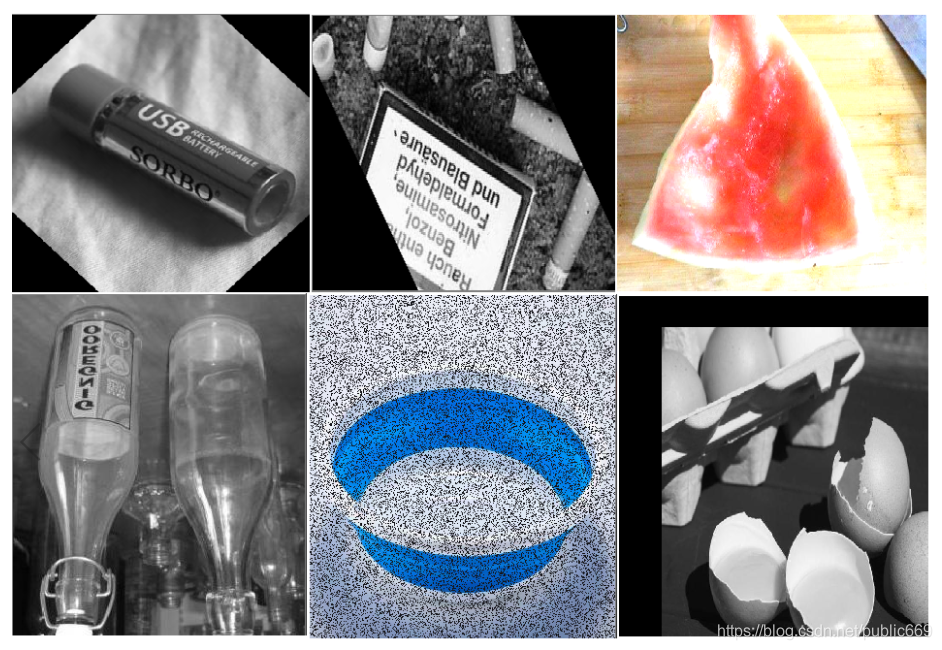
如下为数据集中的部分数据展示

这里就不过多的展示了,因为有些图片比较的不雅
ok,不说题外话了,我们继续
2.预处理数据集
import torch,visdom,time
import os,csv,random,glob
from PIL import Image
from torchvision import transforms
from torch.utils.data import DataLoader,Dataset
class Data(Dataset):
def __init__(self,root,resize,model):
super(Data, self).__init__()
self.root=root
self.resize=resize
# dividing data
if model=='train':
self.images=self.images[:int(0.6*len(self.images))]
self.labels=self.labels[:int(0.6*len(self.labels))]
if model=='verify':
self.images=self.images[int(0.6*len(self.images)):int(0.8*len(self.images))]
self.labels=self.labels[int(0.6*len(self.labels)):int(0.8*len(self.labels))]
else:
self.images=self.images[int(0.8*len(self.images)):]
self.labels=self.labels[int(0.8*len(self.labels)):]
def main():
# show data
viz = visdom.Visdom()
db = Data('data', 64, 'train')
x,y = next(iter(db))
print('sample:', x.shape, y.shape, y)
viz.image(db.normalize(x), win='sample_x', opts=dict(title='sample_x'))
if __name__ == '__main__':
main()
这里需要对数据进行增强,增强的最终结果如下图所示:
- 搭建网络
接下来进行搭建网络了,笔者这里使用的是resnet的网络结构
import torch
from torch import nn
from torch.nn import functional as F
class ResBlk(nn.Module):
def __init__(self, ch_in, ch_out, stride=1):
super(ResBlk, self).__init__()
self.conv1 = nn.Conv2d(ch_in, ch_out, kernel_size=3, stride=stride, padding=1)
self.bn1 = nn.BatchNorm2d(ch_out)
self.conv2 = nn.Conv2d(ch_out, ch_out, kernel_size=3, stride=1, padding=1)
self.bn2 = nn.BatchNorm2d(ch_out)
self.extra = nn.Sequential()
if ch_out != ch_in:
# [b, ch_in, h, w] => [b, ch_out, h, w]
self.extra = nn.Sequential(
nn.Conv2d(ch_in, ch_out, kernel_size=1, stride=stride),
nn.BatchNorm2d(ch_out)
)
class ResNet18(nn.Module):
def __init__(self, num_class):
super(ResNet18, self).__init__()
self.conv1 = nn.Sequential(
nn.Conv2d(3, 16, kernel_size=3, stride=3, padding=0),
nn.BatchNorm2d(16)
)
# followed 4 blocks
# [b, 16, h, w] => [b, 32, h ,w]
self.blk1 = ResBlk(16, 32, stride=3)
# [b, 32, h, w] => [b, 64, h, w]
self.blk2 = ResBlk(32, 64, stride=3)
# # [b, 64, h, w] => [b, 128, h, w]
self.blk3 = ResBlk(64, 128, stride=2)
# # [b, 128, h, w] => [b, 256, h, w]
self.blk4 = ResBlk(128, 256, stride=2)
self.outlayer = nn.Linear(256*3*3, num_class)
def forward(self, x):
return x
def main():
if __name__ == '__main__':
main()
- 训练
import torch
from torch import optim, nn
import visdom
import torchvision
from torch.utils.data import DataLoader
from Data_Pre import Data
# from resnet import ResNet18
from torchvision.models import resnet18
from utils import Flatten
batchsz = 32
lr = 1e-3
epochs = 20
device = torch.device('cuda')
torch.manual_seed(1234)
train_db = Data('data', 224, model='train')
val_db = Data('data', 224, model='verify')
test_db = Data('data', 224, model='test')
train_loader = DataLoader(train_db, batch_size=batchsz, shuffle=True,
num_workers=4)
val_loader = DataLoader(val_db, batch_size=batchsz, num_workers=2)
test_loader = DataLoader(test_db, batch_size=batchsz, num_workers=2)
viz = visdom.Visdom()
def evalute(model, loader):
model.eval()
correct = 0
total = len(loader.dataset)
for x, y in loader:
x, y = x.to(device), y.to(device)
with torch.no_grad():
logits = model(x)
pred = logits.argmax(dim=1)
correct += torch.eq(pred, y).sum().float().item()
return correct / total
可视化训练结果
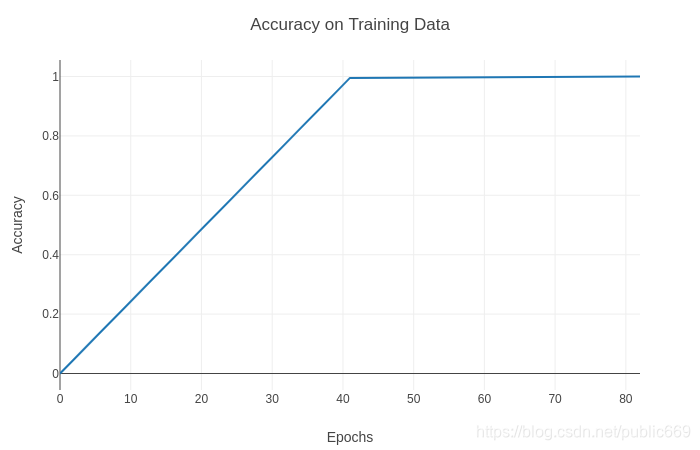
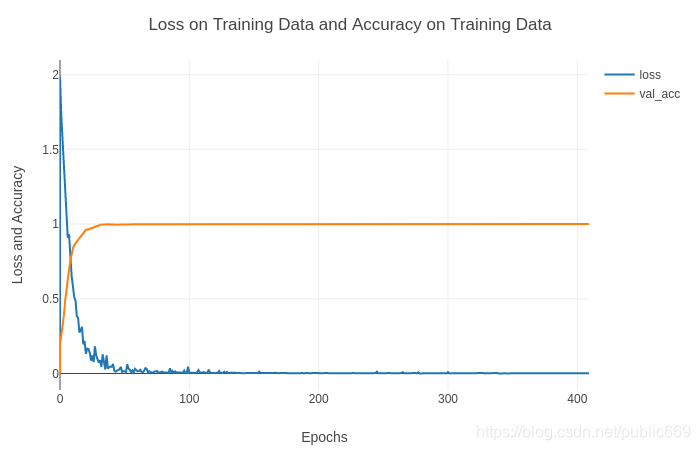
可以看到经过次的迭代后,模型的效果还是不错的,哈哈哈哈哈。。。。。。。
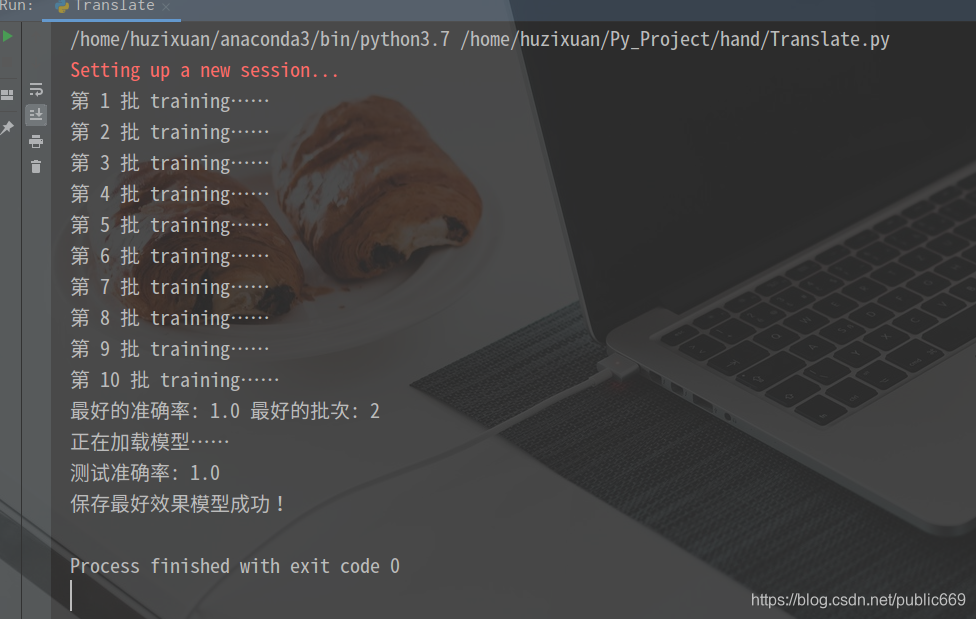
5. 测试模型

项目完整代码:https://github.com/taotao/garbage
有什么问题欢迎同笔者讨论:1017190168
最后希望大家能够动手实践实践
最新版本:
自笔者于2019年8月发出了深度学习实战之垃圾分类博文以来,已被访问上万次,几百次的收藏。同时也有很多的人询问笔者关于这个项目的问题。在这里非常的感谢大家的厚爱。其实很早就想再迭代一个垃圾分类项目出来,但是由于之前比较的忙,一直没有时间将其落实。最近没什么事情,笔者花了一些时间又重新做了一个垃圾分类系统。希望对大家学习研究有所帮助。
新版本链接:
深度学习之垃圾分类系统(识别率近99%)
垃圾分类识别系统(目标检测版)
近期项目:
新冠肺炎(Covid-19)病毒检测
欢迎大家阅读、获取。

