关于ROS 的疑问
一、
https://blog.csdn.net/CH_monsy/article/details/108001875
二、
三、
https://zhuanlan.zhihu.com/p/83598756 :

四、
五、
六:
七、

八、
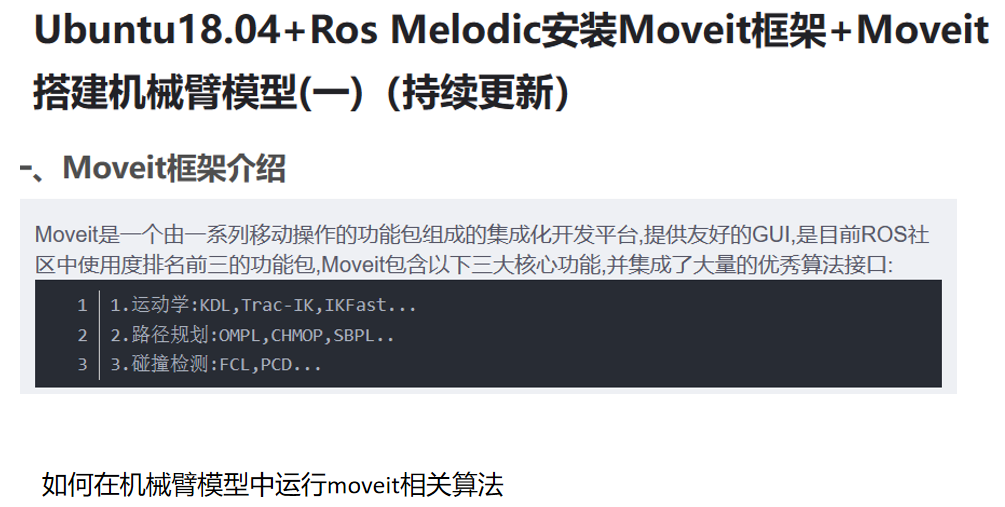
一、安装ubuntu18.04 1、Ubuntu18.04下载,等待在vmware中安装。 2、vmware 下载安装。 腾讯云“在 Vmware 虚拟机上搭建 Ubuntu Linux 开发环境”【注意win11上不能安装vmware15,安装出现蓝屏且不成功,下载了最新版vmware17】 3、vmware tool 安装。 https://blog.csdn.net/MelyLenient/article/details/109204228
二、ROS安装 http://wiki.ros.org/cn/melodic/Installation/Ubuntu或https://zhuanlan.zhihu.com/p/105248080 2.1 软件库source.list 增加阿里源或清华源,解决linux软件库连接问题。https://blog.csdn.net/u010368556/article/details/104965055以及https://blog.csdn.net/qq_45037155/article/details/123361839 2.2 虚拟机联网https://zhuanlan.zhihu.com/p/430932240 sudo rosdep init 的问题 https://blog.csdn.net/Twilightzr/article/details/121714894
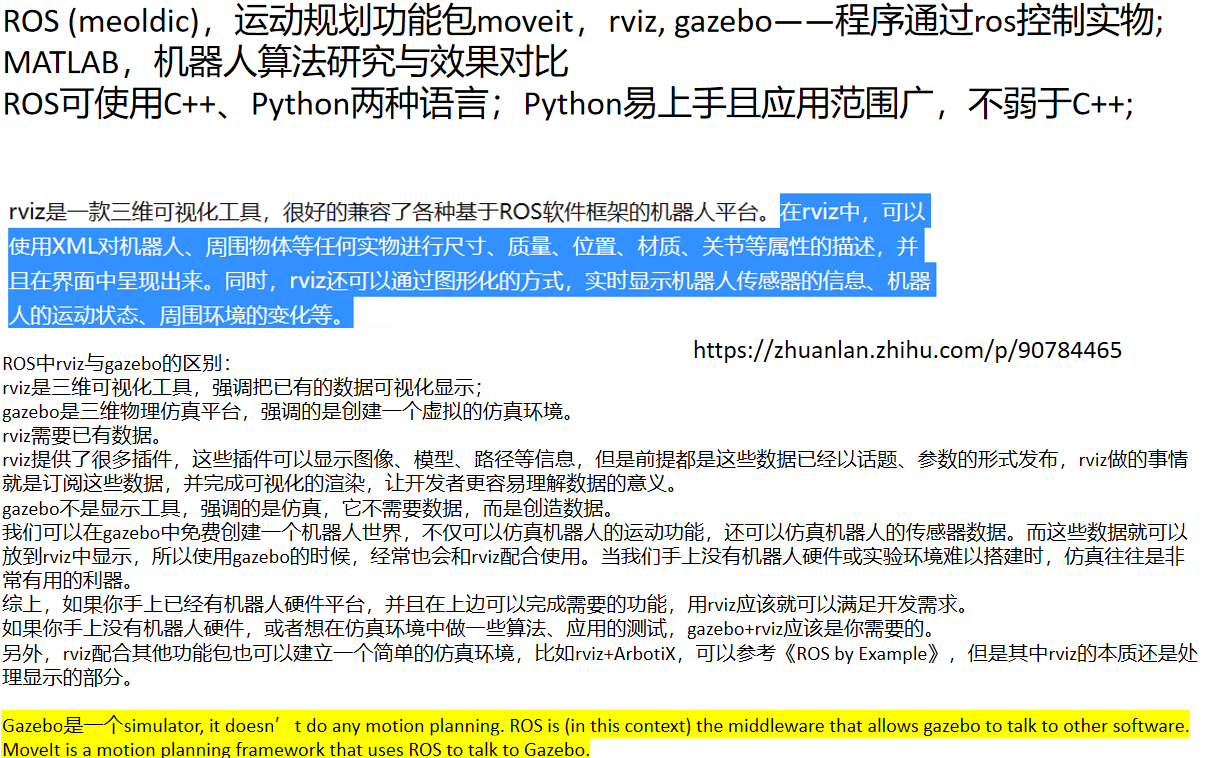
ROS上UR5机械臂仿真 https://www.guyuehome.com/19083
1、urdf是一个程序文件,通过rviz渲染成三维图形,通过贴图文件可以改变外观。 2、ROS自带UR5 urdf程序文件;
九、
SOTA:state-of-the-art的英文缩写;state-of-the-art常在各种计算机视觉领域的会议期刊论文第一页上见到;直译意思是:最前沿的,最先进的,目前最高水平;即指在公开的数据集上,目前检测到的效果最好、识别率最高、正确率最高,算法模型超过以前的所有方法,达到最优;
十、
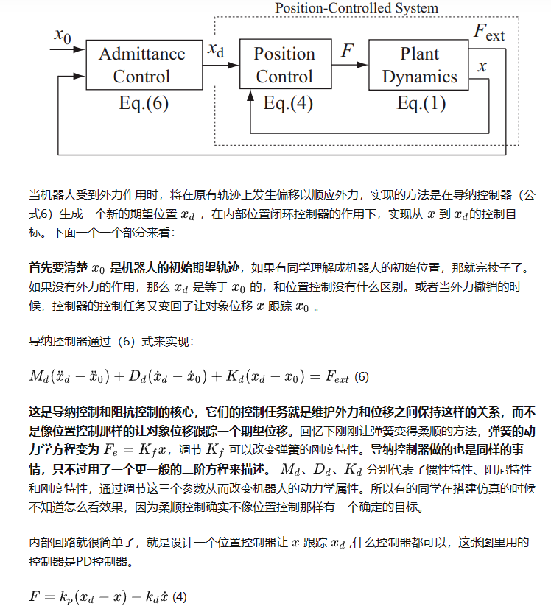
两种控制方法:
1、阻抗控制:
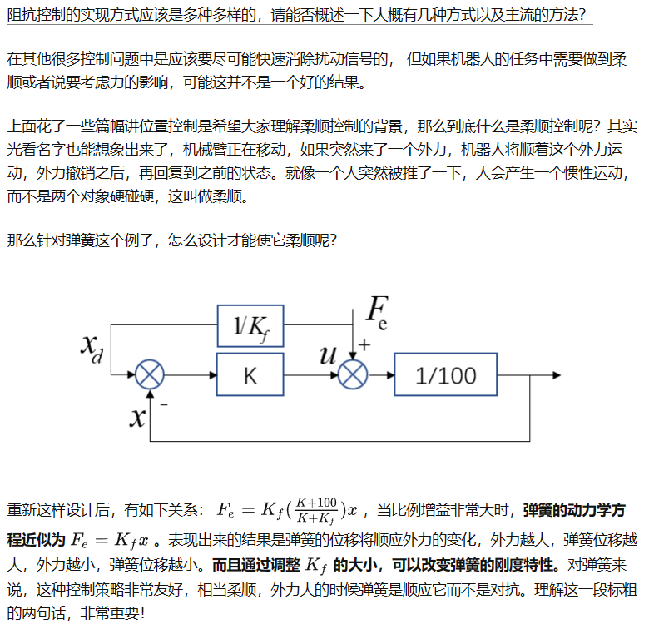

2、导纳控制: