机械臂开发之正运动学
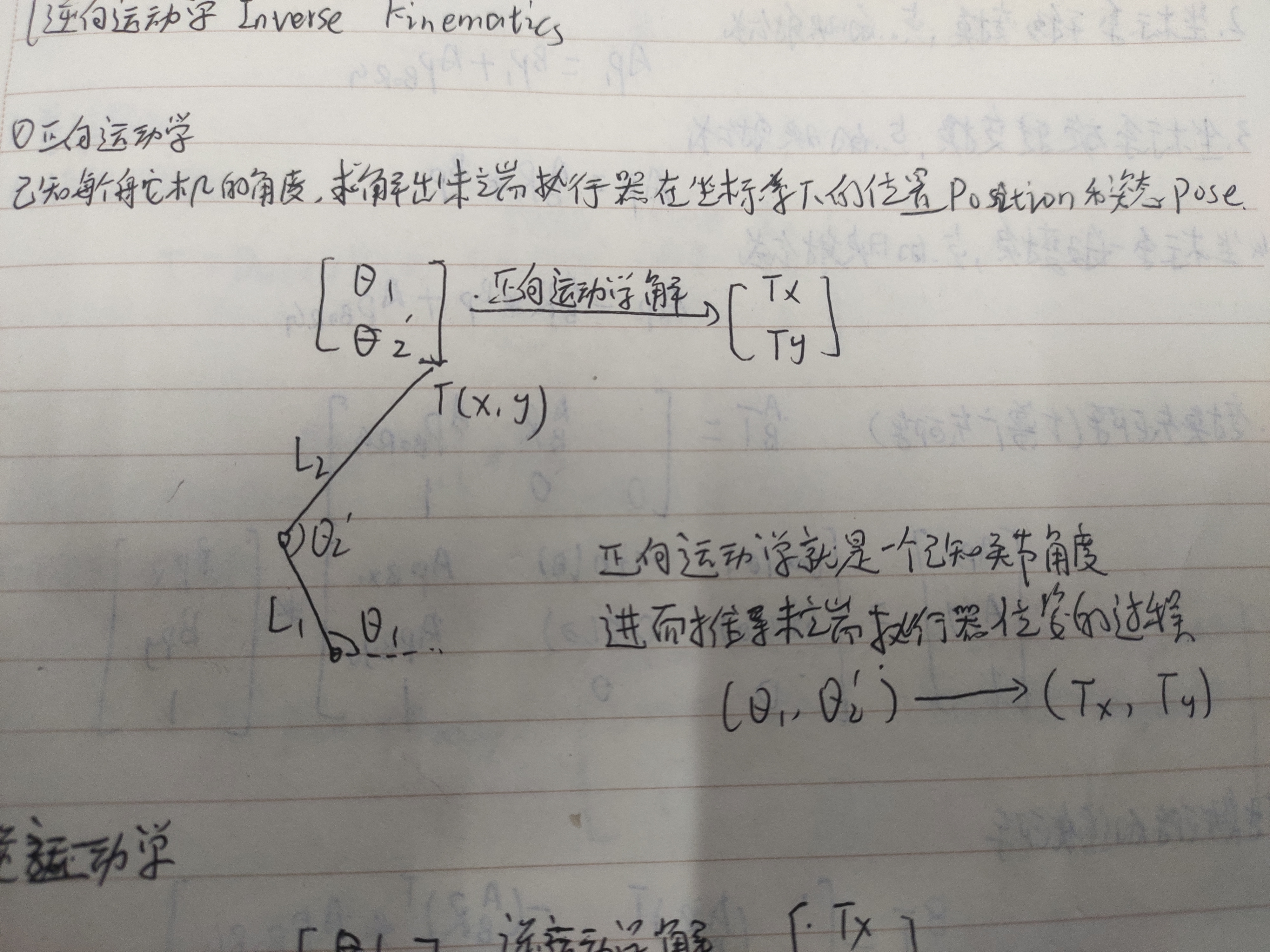
我是以三自由度的机械臂来进行求解的,其他自由度的机械臂求解基本相似。解释一下正运动学原理
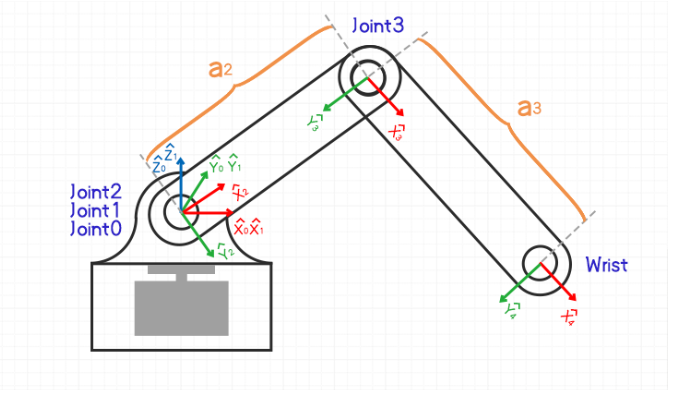
首先分析一下3自由度机械臂的DH模型
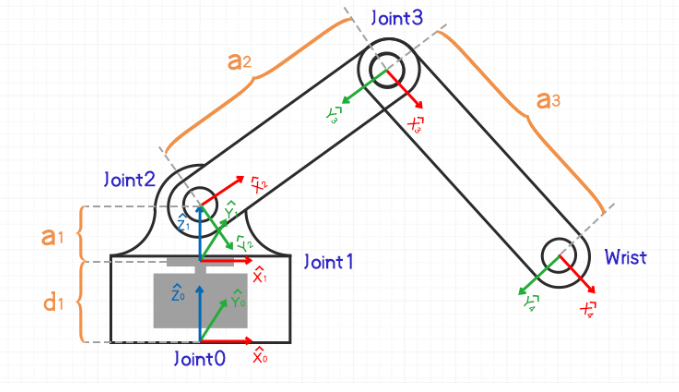
机械臂的基坐标系是Joint0
Joint1,Joint2,Joint3都是旋转关节,Joint4是腕关节。
我们使用 表示从关节Jointn-1到Jointn的变换。
表示从关节Jointn-1到Jointn的变换。
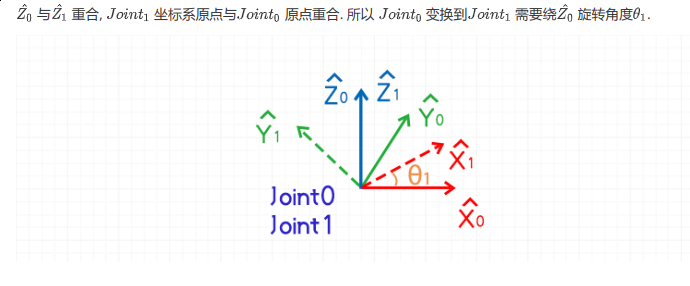
关节Z轴跟关节的旋转轴共向,我们先来分析Joint0到Joint1的变换。
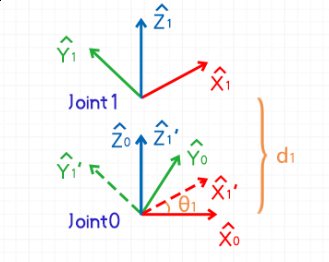
Z0与Z1在一条直线上,所以α0=0,a0=0.
Joint0的坐标系先绕Z0旋转角度Θ1,然后顺着Z轴向上平移d1.
所以有

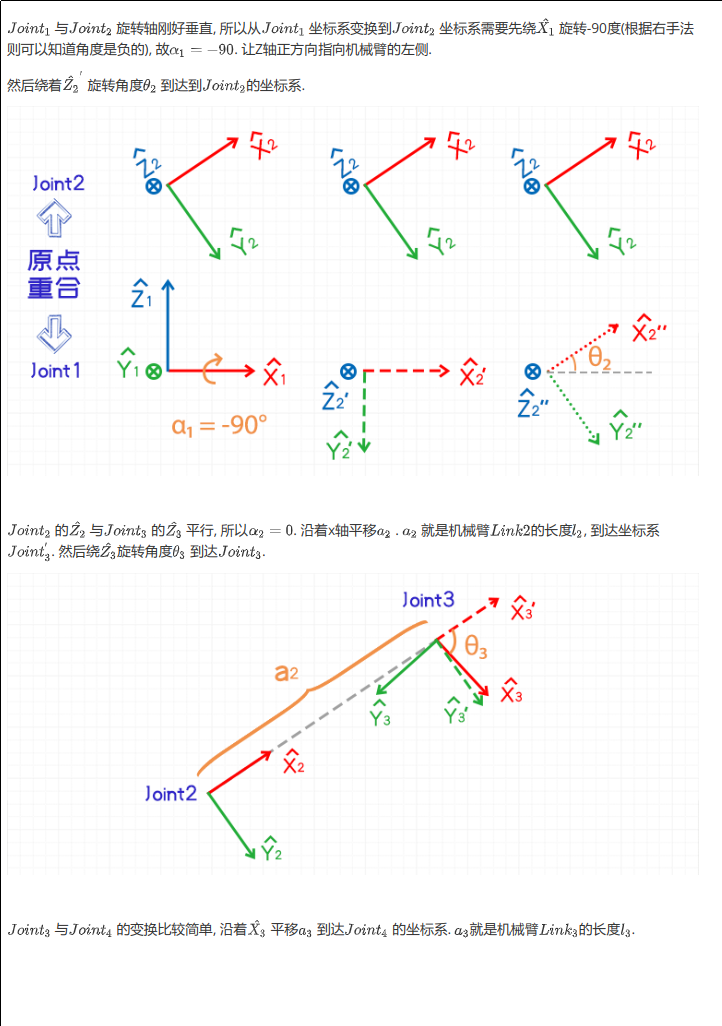
接下来看从Joint1到Joint2之间的变换
Z1与Z2直线相互垂直,所以需要先绕X1旋转-90度α1=90.
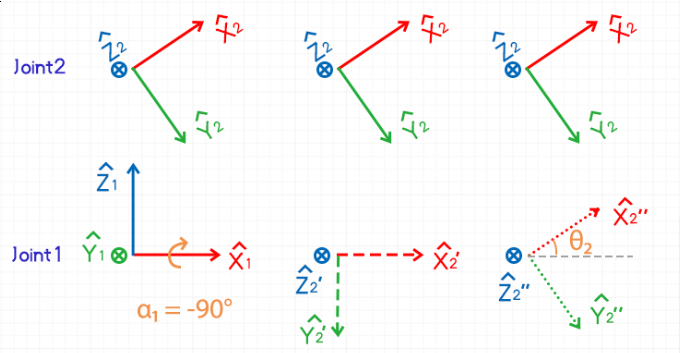
当我们不需要沿着X轴平移,然后绕Z2'旋转Θ2,但是不管Z轴怎么旋转,都不会与Z2共线,变换无法下去,这个时候我们就需要你调整一下坐标系的摆放位置。
改变后如下
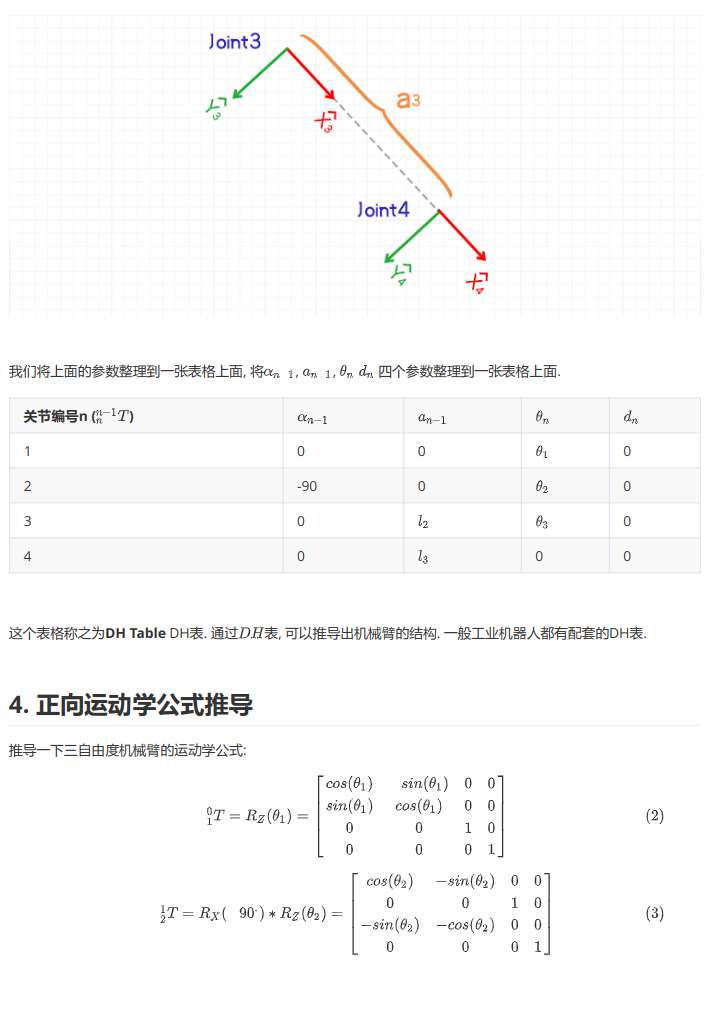
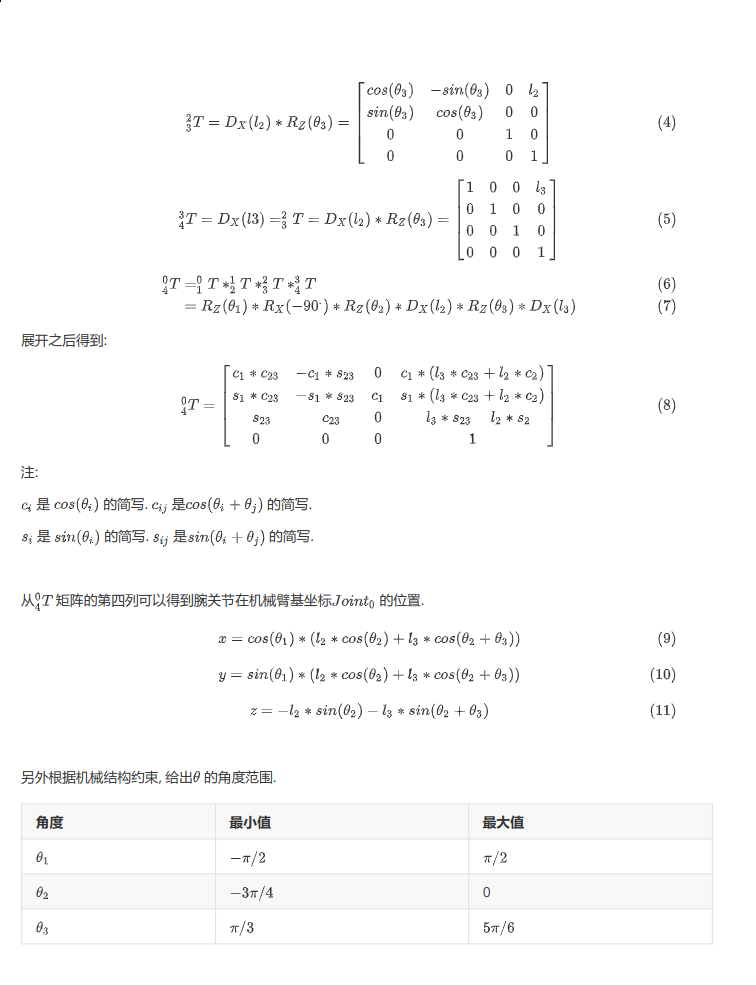
接下来贴出一下推导过程


 浙公网安备 33010602011771号
浙公网安备 33010602011771号