Ubuntu20.04系统配置ROS-noetic环境
1.设置你的source.list
sudo sh -c'echo“ deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc)main”> /etc/apt/sources.list.d/ros-latest.list'
2.设置你的钥匙
sudo apt-key adv --keyserver'hkp://keyserver.ubuntu.com:80'--recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
3.确保你的Debian软件包索引是最新的
sudo apt-get update
4.桌面完整安装:桌面中的所有内容以及2D/3D摸拟器和2D/3D感知包
sudo apt-get install ros-noetic-desktop-full
5.初始化 rosdep(在开始使用ROS之前你还需要初始化rosdep。rosdep可以方便在你需要编译某些源码的时候为其安装一些系统依赖,同时也是某些ROS核心功能组件所必需用到的工具。)
sudo rosdep init
rosdep update
如果安装ROS时执行到sudo rosdep init时出现sudo rosdep:找不到命令提示
解决方法:需要输入:
sudo apt install python-rosdep2
然后输入:
$ sudo rosdep init
时出现错误提示:
ERROR: cannot download default sources list from:
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down.
解决方法:输入
$ sudo apt-get install python-rosdep python-wstool ros-noetic-ros
如果还是出现问题,此时可能是因为raw.githubusercontent.com网站被墙了。
解决办法是修改hosts文件,添加这个网站的ip地址
#打开hosts文件
sudo vim /etc/hosts
#在文件末尾添加
151.101.84.133 raw.githubusercontent.com
#保存后退出再尝试
这样的话问题就完美解决了,继续执行sudo rosdep init,还可能出现联网超时的问题,如图
![]()
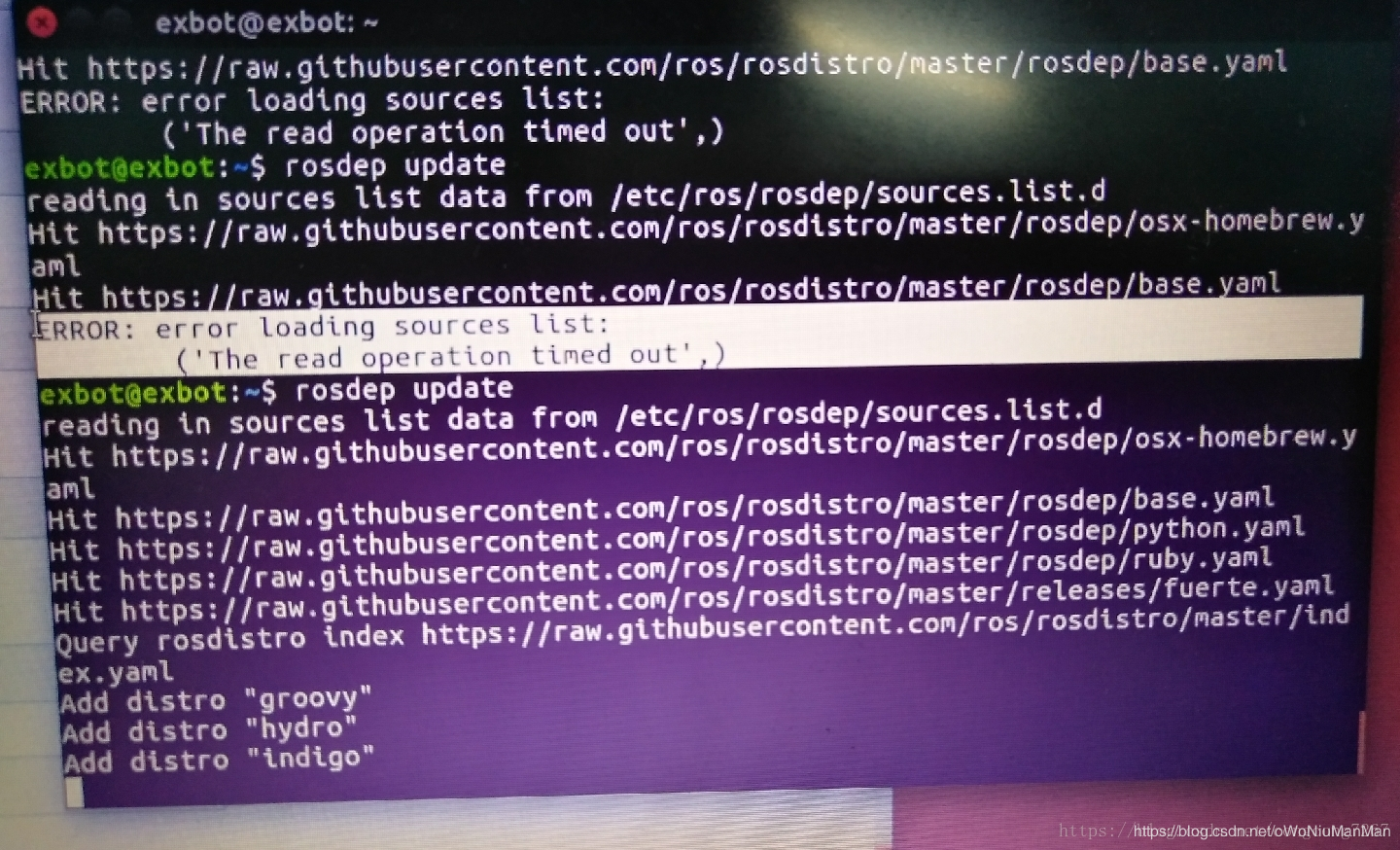
我的解决办法,你换成你的手机热
source /opt/ros/noetic/setup.bash
bash
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc source ~/.bashrc
到这里ros环境基本上配置完成了。
1.创建一个ros工作区
$ mkdir -p ~/catkin_ws/src $ cd ~/catkin_ws/ $ catkin_make
该catkin_make命令是与工作的便捷工具柳絮工作区。第一次在您的工作空间中运行它,它将在您的“ src”文件夹中创建一个CMakeLists.txt链接。
设置环境变量
source devel/setup.bash
要确保安装脚本正确覆盖了您的工作区,请确保ROS_PACKAGE_PATH环境变量包含您所在的目录。
echo $ROS_PACKAGE_PATH /home/youruser/catkin_ws/src:/opt/ros/kinetic/share
到这里,就可以开始你的ros之旅了。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号