ROS中3D机器人建模(五)
一.创建一个差速驱动移动机器人模型
前面我们已经创建了一个7-DOF机械臂机器人模型,接下来我们将创建一个差速机器人模型,差速轮式机器人在机器人底盘的两端安装两个轮子,
整个底盘由一个或两个脚轮支撑。轮子将通过调节速度来控制机器人的移动速度,如果两个马达以相同的速度运行,轮子会向前或者向后移动。
如果一个轮子的速度比另一个轮子慢,机器人就会偏向低速的那一边。
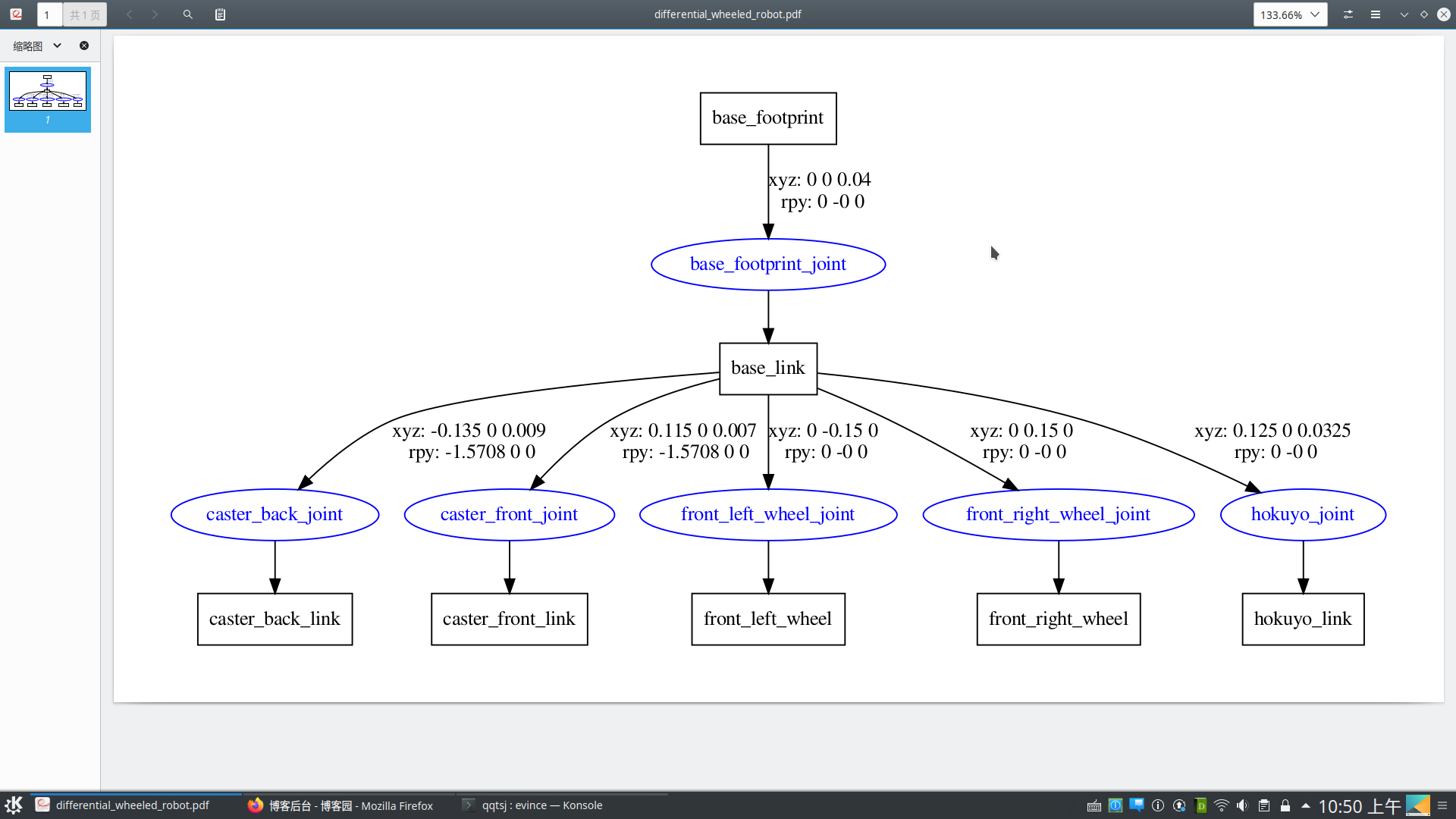
差速机器人由5个关节和5个连杆,两个主要的关节将轮子连接到机器人上。其余3个是固定关节,2个用于经支撑脚轮连接到机器人主体上,1个
用于将底盘连接到机器人主体上。
差速机器人的连杆与关节连接图如下:
接下来我们来解析差速机器人的代码,文件为:diff_wheeled_robot.xacro
机器人被命名为differential_wheeled_robot,还包含一个名为wheel.urdf.xacro的URDF文件。xacro文件包含轮子的定义及其传动方式。
如果我们使用该xacro文件,就可以避免为两个轮子写两套定义,因为两个轮子在形状和大小上是相同的,我们采用xacro的定义:
1 <?xml version="1.0"?> 2 <robot name="differential_wheeled_robot" xmlns:xacro="http://ros.org/wiki/ xacro"> 3 4 <xacro:include filename="$(find mastering_ros_robot_description_pkg)/urd f/wheel.urdf.xacro" />
轮子的定义在wheel.urdf.xacro中给出。我们可以指定轮子是否必须放在左边、右边、前面或后面。使用这个宏,我们最多可以创建4个轮子,但目前我们只需要两个:
19 <xacro:macro name="wheel" params="fb lr parent translateX translateY flipY"> <!-- fb : front, back ; lr: left, right -->
20 <link name="${fb}_${lr}_wheel">
我们还指定了仿真所需的Gazebo参数。这里提到的是与轮子相关的Gazebo参数。我们可以用gazeboreference标签说明摩擦系数和刚度系数:
41 <gazebo reference="${fb}_${lr}_wheel">
42 <mu1 value="1.0"/>
43 <mu2 value="1.0"/>
44 <kp value="10000000.0" />
45 <kd value="1.0" />
46 <fdir1 value="1 0 0"/>
47 <material>Gazebo/Grey</material>
48 <turnGravityOff>false</turnGravityOff>
49 </gazebo>
我们为轮子定义的关节是连续转动关节,因为在轮子关节中没有任何限值,这里的parent link是机器人底盘,child link是每个轮子:
51 <joint name="${fb}_${lr}_wheel_joint" type="continuous">
52 <parent link="${parent}"/>
53 <child link="${fb}_${lr}_wheel"/>
54 <origin xyz="${translateX * base_x_origin_to_wheel_origin} ${translateY * bas e_y_origin_to_wheel_origin} ${base_z_origin_to_wheel_origin}" rpy="0 0 0" />
我们还需要设定每个轮子的transmission标签。该轮子的宏定义如下:
60 <!-- Transmission is important to link the joints and the controller -->
61 <transmission name="${fb}_${lr}_wheel_joint_trans">
62 <type>transmission_interface/SimpleTransmission</type>
63 <joint name="${fb}_${lr}_wheel_joint" />
64 <actuator name="${fb}_${lr}_wheel_joint_motor">
65 <hardwareInterface>EffortJointInterface</hardwareInterface>
66 <mechanicalReduction>1</mechanicalReduction>
67 </actuator>
68 </transmission>
69
70 </xacro:macro>
71 </robot>
在diff_wheeled_robot.xacro中,我们可以用以下命令来使用wheel.urdf.xacro中定义的宏:
241 <wheel fb="front" lr="right" parent="base_link" translateX="0" translateY="0.5" flipY="1"/> 242 <wheel fb="front" lr="left" parent="base_link" translateX="0" translateY="-0.5" flipY="1"/>
使用前面的几行代码,我们定义了机器人底盘的左侧和右侧的轮子。机器人底盘是圆柱形的。
下面给出了惯性计算的宏定义,xacro代码段将使用圆柱的质量、半径和高度来计算惯性张量,代码如下:
72 <!-- Macro for calculating inertia of cylinder -->
73 <xacro:macro name="cylinder_inertia" params="m r h">
74 <inertia ixx="${m*(3*r*r+h*h)/12}" ixy = "0" ixz = "0"
75 iyy="${m*(3*r*r+h*h)/12}" iyz = "0"
76 izz="${m*r*r/2}" />
77 </xacro:macro>
下面给出了启动文件的定义,可用于在RViz中显示该机器人模型。启动文件命名为view_mobile_robot.launch:
1 <launch> 2 <arg name="model" /> 3 <!-- Parsing xacro and setting robot_description parameter --> 4 <param name="robot_description" command="$(find xacro)/xacro --inorder $(find m astering_ros_robot_description_pkg)/urdf/diff_wheeled_robot.xacro" /> 5 <!-- Setting gui parameter to true for display joint slider --> 6 <param name="use_gui" value="true"/> 7 <!-- Starting Joint state publisher node which will publish the joint values -- > 8 <node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_stat e_publisher" /> 9 <!-- Starting robot state publish which will publish tf --> 10 <node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publ isher" /> 11 <!-- Launch visualization in rviz --> 12 <node name="rviz" pkg="rviz" type="rviz" args="-d $(find mastering_ros_robot_de scription_pkg)/urdf.rviz" required="true" /> 13 </launch>
与机械臂URDF文件相比较,唯一区别是名称不同,其他部分都是一样的。
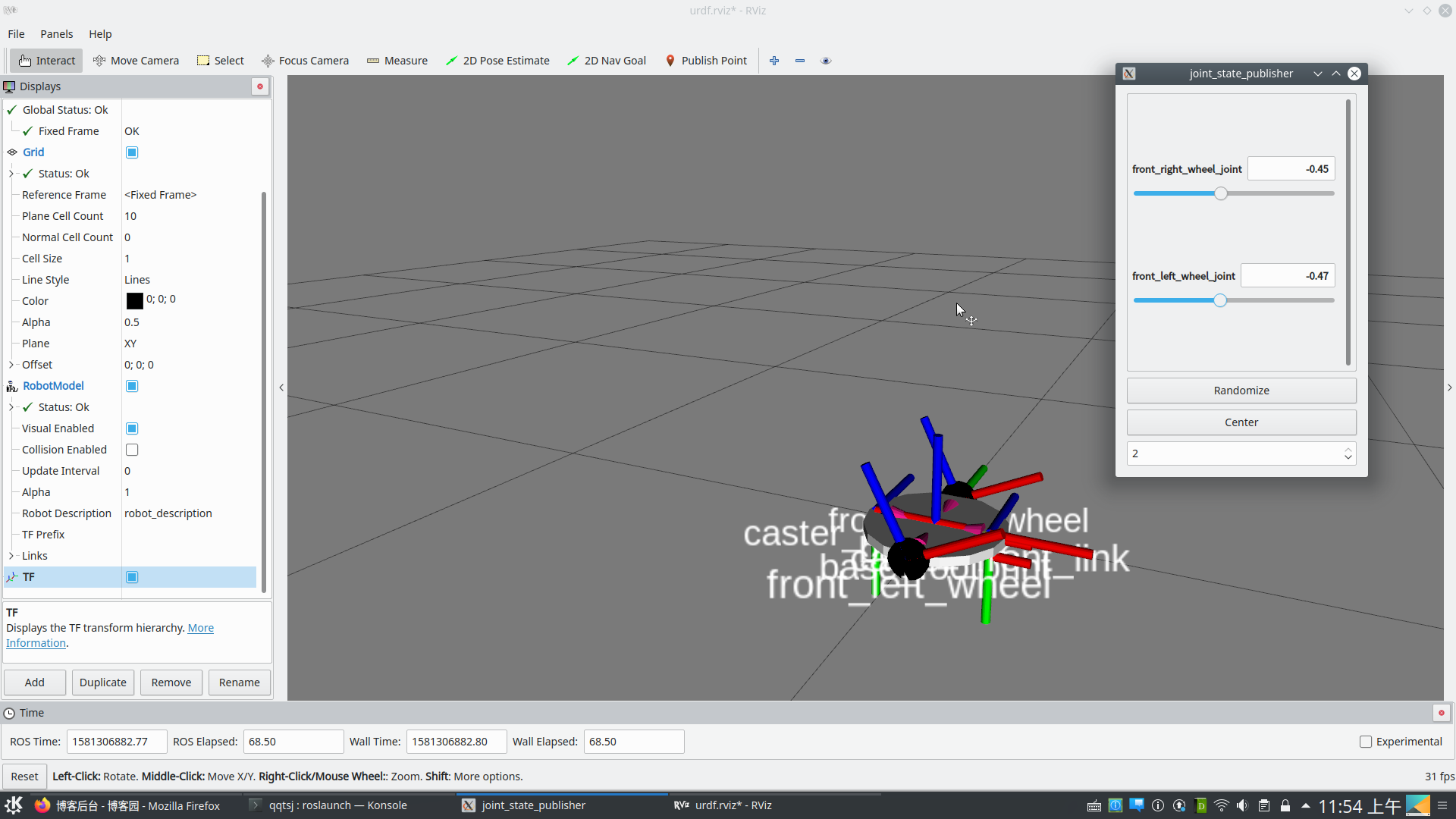
我们用以下命令查看移动机器人:
$roslaunch mastering_ros_robot_description_pkg view_mobile_robot.launch
机器人如下:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号