最近邻搜索,kdtree, rtree, DBSCAN,nanoflann
最近邻搜索,kdtree, rtree, DBSCAN,nanoflann
rtree用于搜索近邻路径点判断沿墙封闭;
RTree.测试(矩形覆盖的最近邻搜索,把矩形改成点之后就是点的最近邻搜索)
已经在CppRoboticsTest里面测试
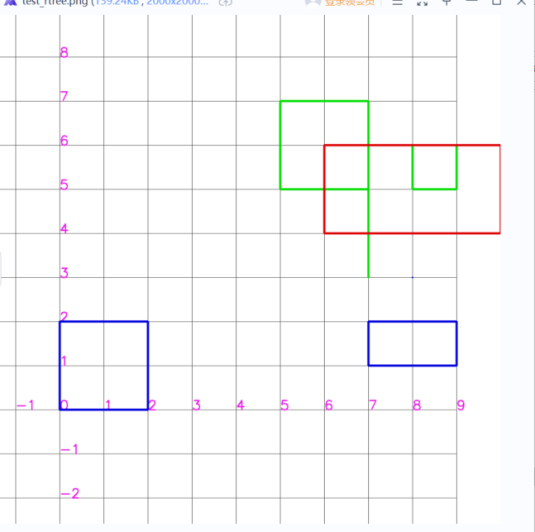
被红色矩形覆盖的是绿色;
rtree 效率测试,十万个点,search 耗时很少;

聚类算法 - DBSCAN
DBSCAN:Density-Based Spatial Clustering of Applications with Noise,具有噪声的基于密度的聚类方法。
DBSCAN 是一种基于密度的聚类算法,这类密度聚类算法一般假定类别可以通过样本分布的紧密程度决定。同一类别的样本,他们之间是紧密相连的,也就是说,在该类别任意样本周围不远处一定有同类别的样本存在。
通过将紧密相连的样本划为一类,这样就得到了一个聚类类别。通过将所有各组紧密相连的样本划为各个不同的类别,则我们就得到了最终的所有聚类类别结果。
DBSCAN 的原理描述起来很简单:任选一个没有类别的核心点作为种子,找到该核心点能够密度可达的样本集合,即为一个聚类簇。接着继续选择另一个没有类别的核心点去寻找密度可达的样本集合,这样就得到另一个聚类簇。一直运行到所有核心点都有类别为止。
├nanoflann.hpp 【great】最近邻搜索 库 测试;封装
├开源地址:
nanoflann/pointcloud_kdd_radius.cpp at master · jlblancoc/nanoflann (github.com)
nanoflann/pointcloud_example.cpp at master · jlblancoc/nanoflann (github.c
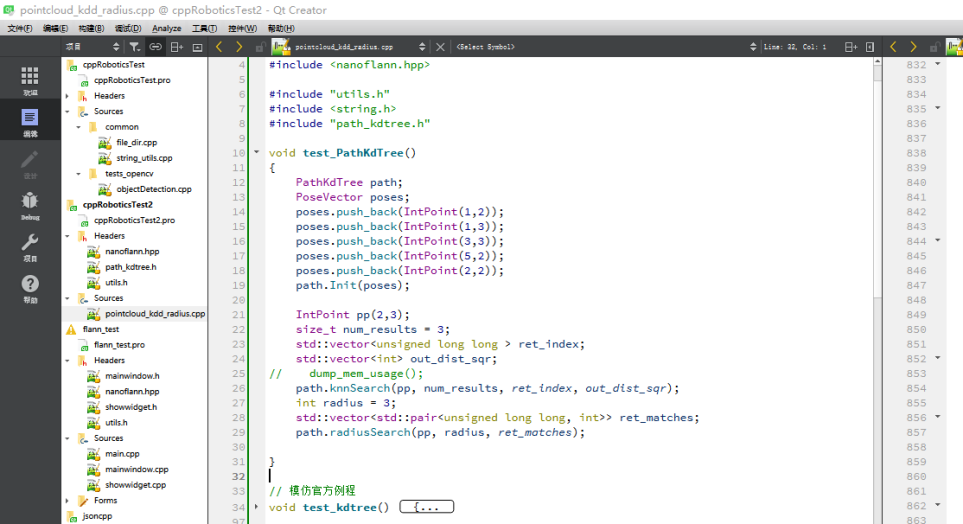
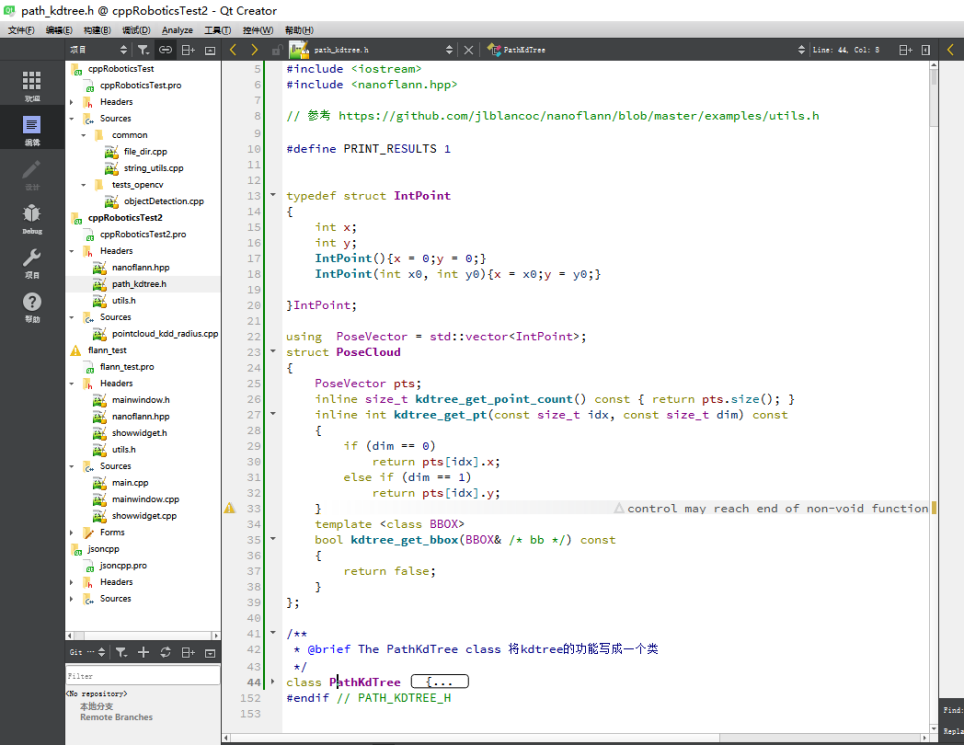
封装之后可以直接求解path路径点最近邻相关问题;