
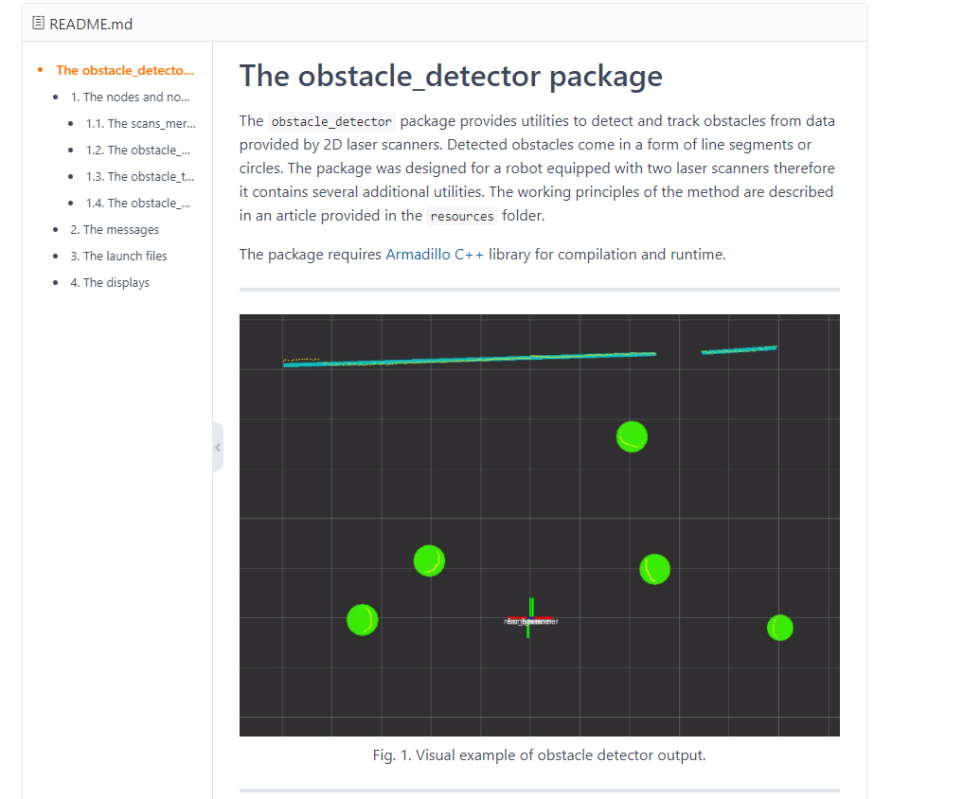
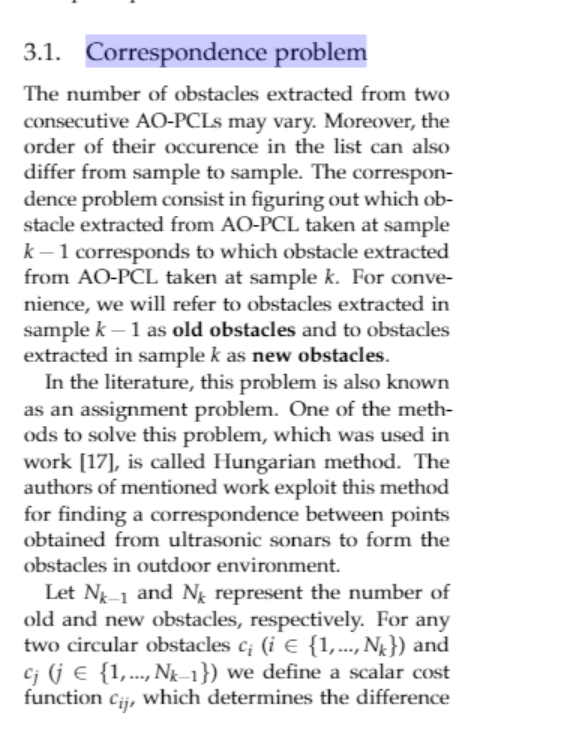
scan2D障碍物检测跟踪,人腿的检测和跟踪
obstacle_detector-master(scan2D障碍物检测跟踪
代码已下载

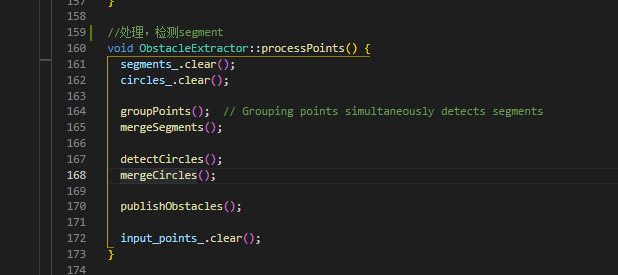
看obstacle_extractor;
segment相关
计算点到直线距离,点到直线的投影,计算顺逆时针;
点集分段拟合直线
直线拟合使用iterative end point fit
参考线段提取IEPF Line Extraction Algorithm----python code.

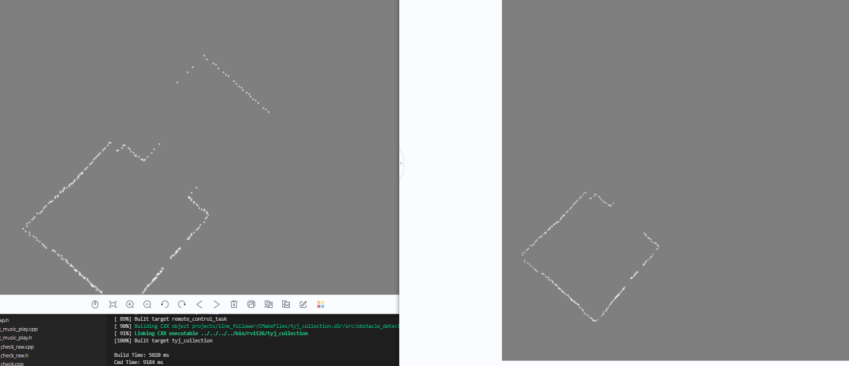
segment检测,线段提取实现;
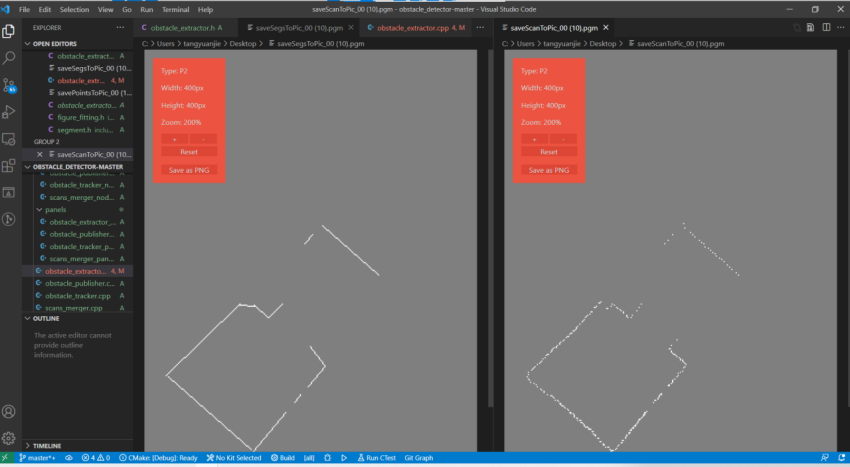
数据点过滤前后对比

代码复现,直线拟合用eigen计算最小二乘解
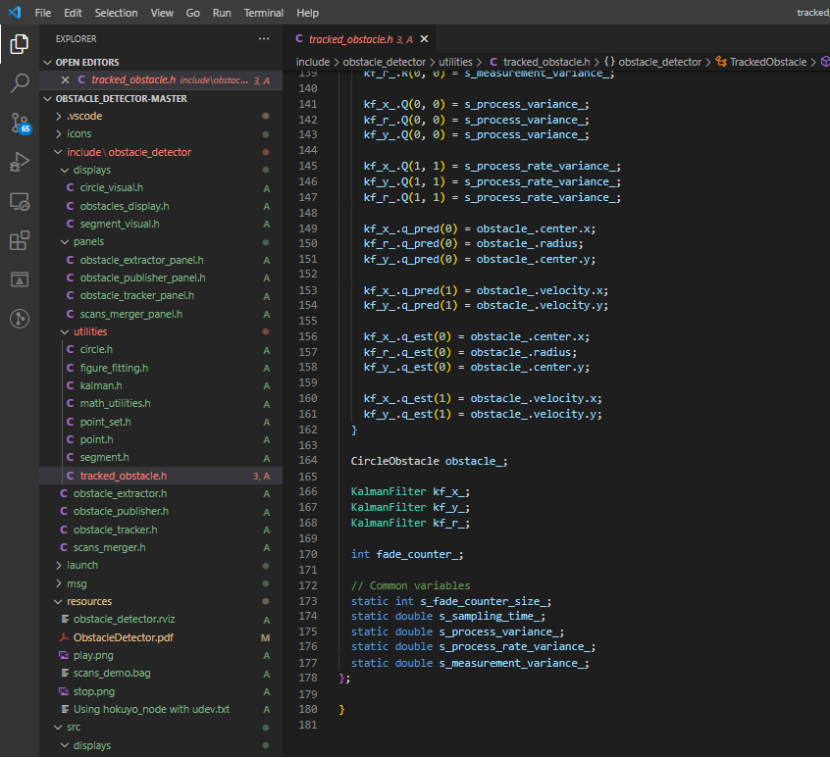
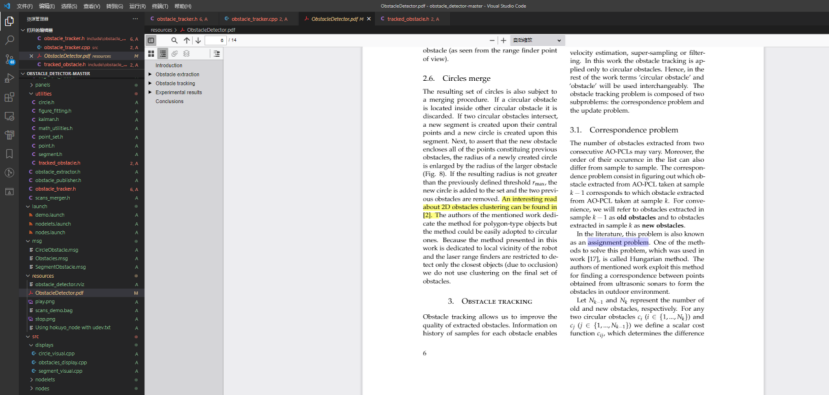
圆的提取和合并(没有写)开源项目里面有
|-------people_melodic ROS包 包含下面的leg_detector
// 包含人脸检测、人的检测、跟踪

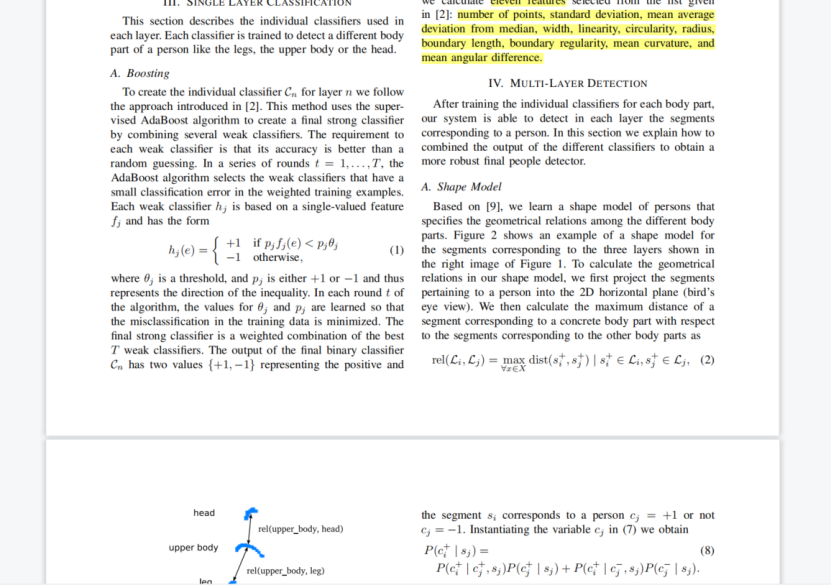
2D scan 识别 人腿的论文
E:\[OPENSOURCE_CODE]\11T-Martinez-Mozos.pdfE:\[OPENSOURCE_CODE]\11T-Martinez-Mozos.pdf
代码已下载
E:\[OPENSOURCE_CODE]\people-melodic\leg_detector
参考博客解读
(4条消息) Ros:people包下子包leg_detector及其相关包笔记_rezrezre的博客-CSDN博客_leg_tracker
计算十几种特征值,每一个特征都是一个浮点数;
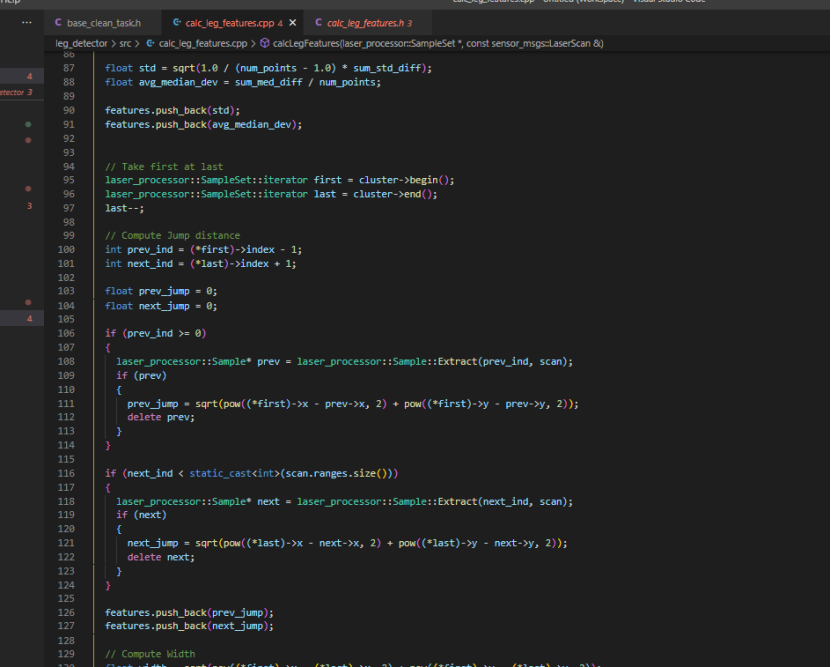
training 使用cvRTree随机树做分类器;
// 样本的bag
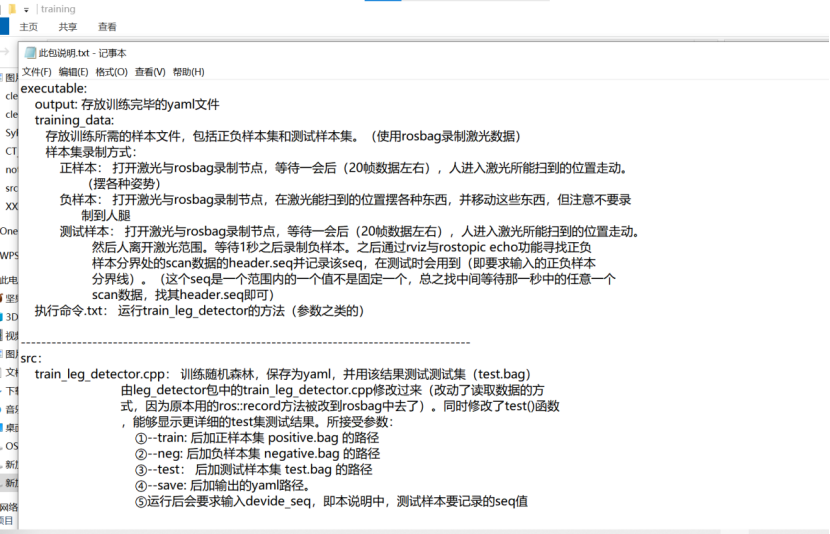
training下载博客中提到的数据集,训练的代码有注释
E:\[OPENSOURCE_CODE]\people-melodic\leg_detector\training
讲到和训练相关的参数,就是一个零一分类;
训练操作说明,要使用ros实现;
【扩展plugin】social navigation layer 社会活动图层
(5条消息) Turtlebot 2e 导航之 `move_base` 参数详解: 社会活动导航层`social_navigation_layers`初探_摸着石头撑船-CSDN博客
Proxemic 层,增加通行代价,在行人的运动方向增加;
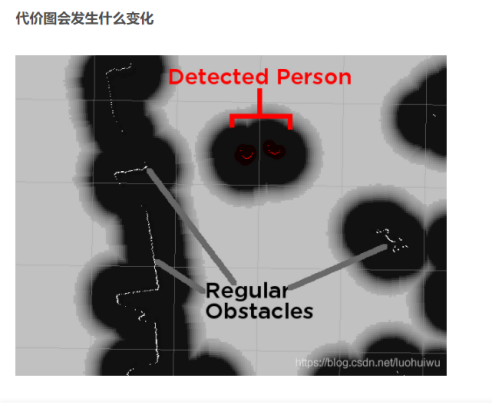
passing layer,始终在人的左侧通过,只在行人的一侧增加通行成本

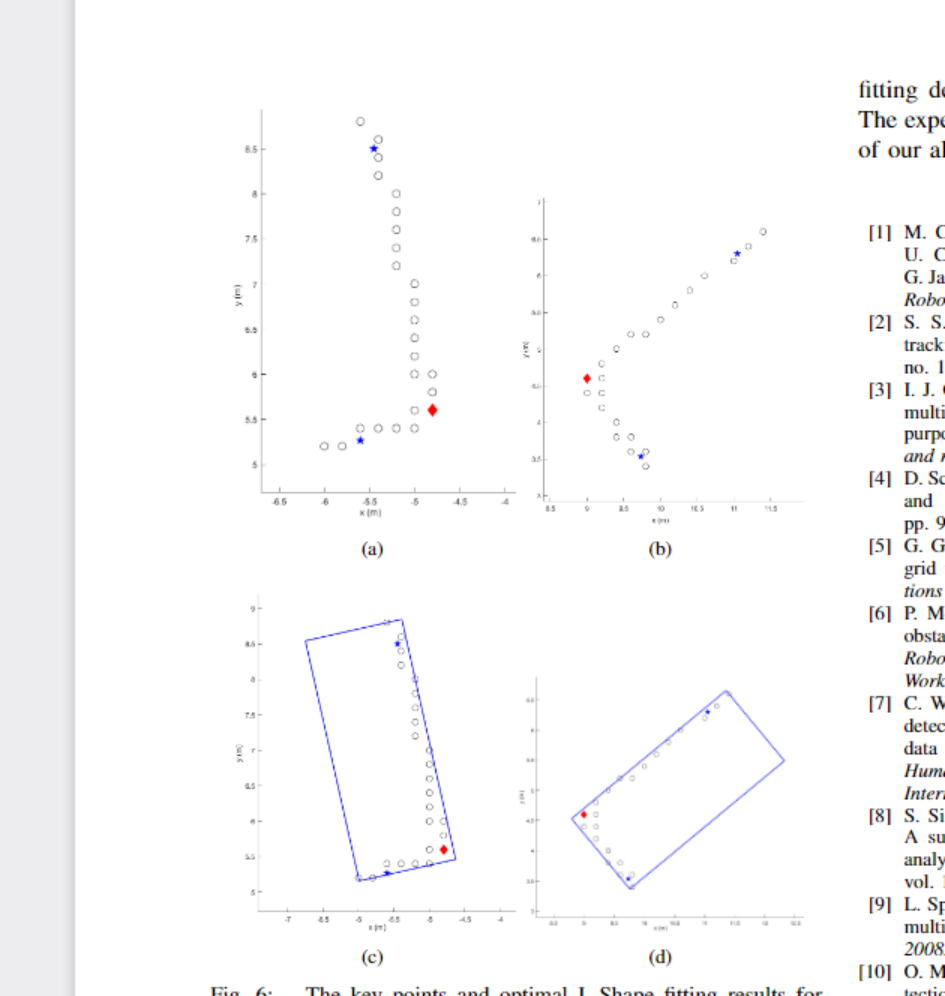
2D雷达数据检测L形状、矩形车辆(行人检测)
论文已经下载
E:\[OPENSOURCE_CODE]\1812.09670.pdf

各种轮廓匹配方法
、匹配方法间的比较
CCH(链码直方图):是一种基于轮廓匹配方法。具有较强的平移不变性,尺度不变性一般,具有90度的旋转不变性。由于编码简单,执行速度快。计算量和所需内存都较小,适合差别明显的物体,对平滑和非平滑物体的识别并不明显;
PGH(成对几何直方图):是一种基于轮廓匹配方法。具有较强的平移不变性和尺度不变性,具有360度的旋转不变性。执行速度快,可以较好地识别多边形物体和部分自封闭的物体,由于它的计算过程,对非多边形物体的识别可能会浪费计算量;
CFSS(五种简单形状描述符结合):是一种基于轮廓匹配方法。具有较强的平移不变性和尺度不变性,具有360度的旋转不变性。执行速度处于CCH方法和PGH方法之间。识别率与PGH相当,但是比它需要更少的计算时间和内存。
HAUSDORFF距离:是一种基于轮廓匹配方法。具有较强的平移不变性,但是尺度不变性和旋转不变性都较差。由于处理的数据维数较多,执行效率是这五种方法中最慢的一个。可用于匹配部分重和形状物体。
Hu不变矩:是一种基于区域的形状匹配方法。具有较强的平移、尺度和旋转不变性,其中旋转不变性为360度。但由于匹配的数据量大,执行速度较慢。适合于进行一些更精确的匹配。
shaplet 时间序列特征提取和分类,可解释性好


 浙公网安备 33010602011771号
浙公网安备 33010602011771号