
基于可见性图的最短路径规划
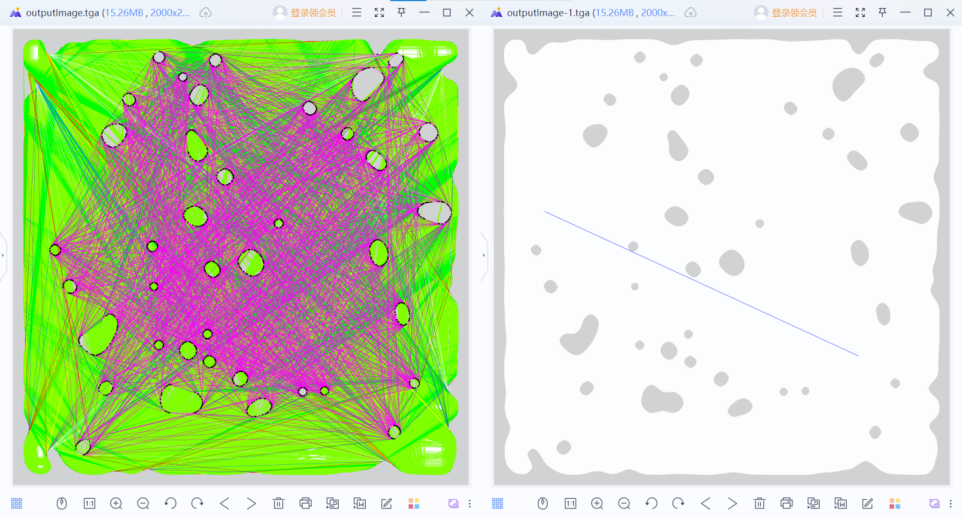
实现效果;
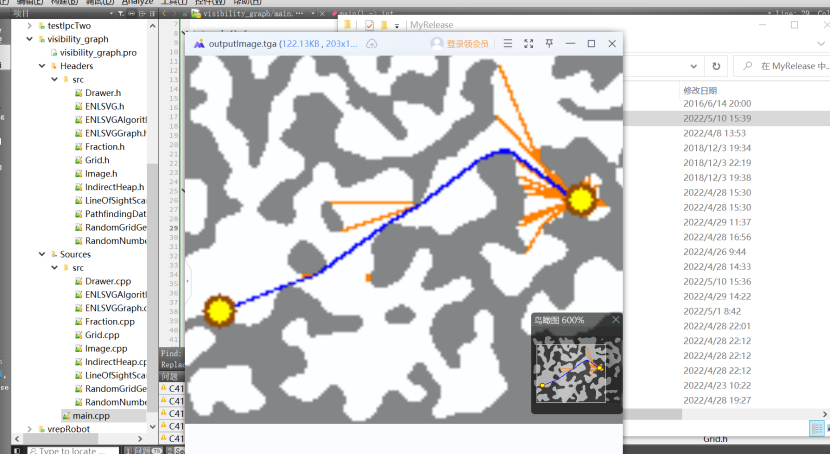
建立地图相关数据结构很耗时,适合离线路径规划
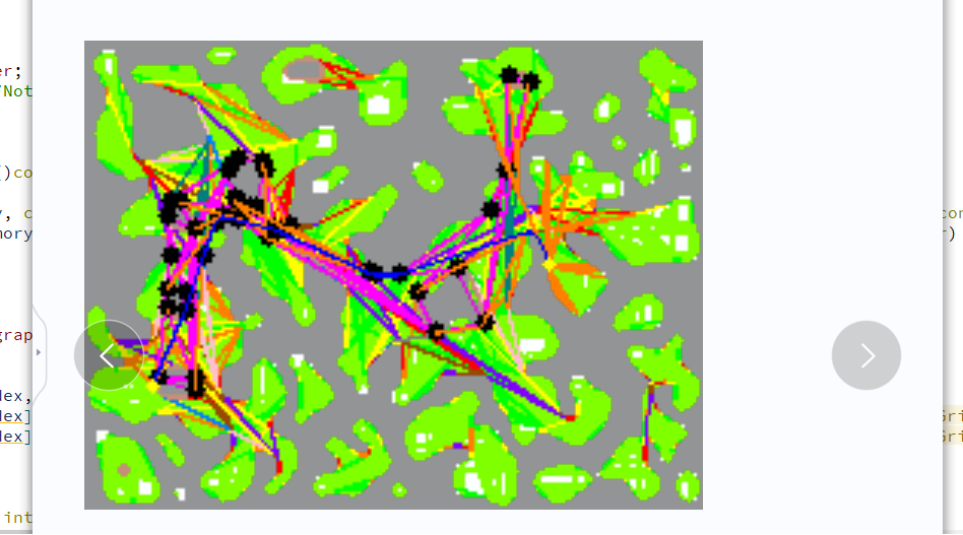
可见性图的建立会比较复杂,障碍物都会转换为多边形,convex或者concave;
地图转换为多边形考虑使用approxypoly轮廓多边形拟合或者使用ros中的costmap_convertor;
visibility graph原理
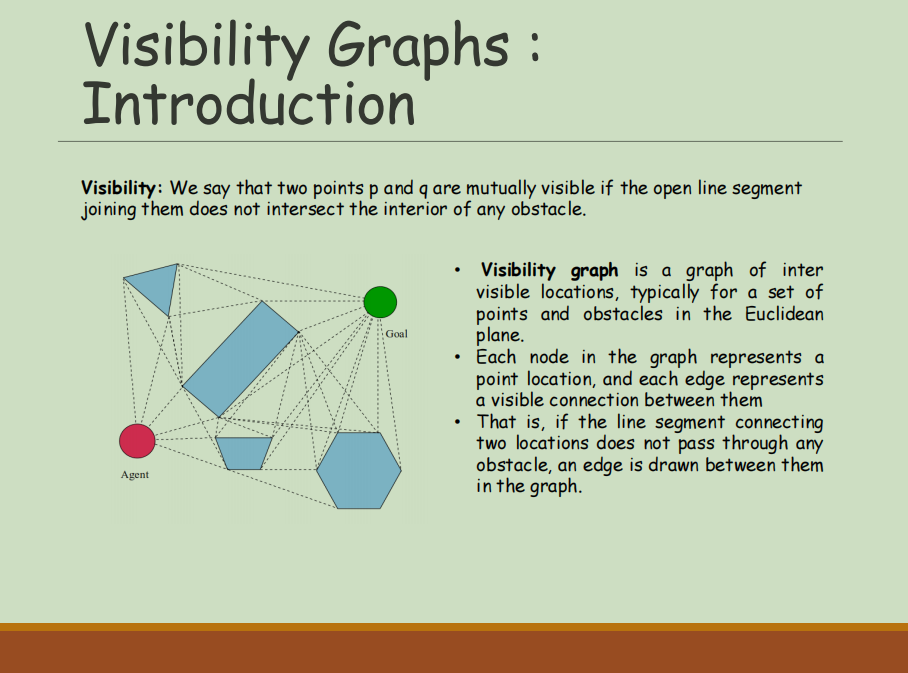
why use visibilty graph?
给定平面上一些多边形障碍物和两个障碍物之外的点,可以据此找到不穿过障碍物的最短路径;
优化处理

如上图中,指向凸多边形内部的edge可以直接去掉;因为两边之和大于第三边;这样做可以减少搜索时间;
处理之后称之为reduced visibility graph;
可见性图的应用
最短路径搜索;(把起点和终点和多边形顶点一起建立 visibility graph,然后使用图论最短路径搜索,使用dijkstra)
艺术画廊问题;
参考文献
1. https://en.wikipedia.org/wiki/Visibility_graph
2. http://cs.smith.edu/~streinu/Teaching/Courses/274/Spring98/Proje
cts/Philip/fp/visibility.htm
3. http://www.cs.wustl.edu/~pless/546/lectures/l22.html
4. Choset, Howie M. Principles of robot motion: theory, algorithms, and
implementation. MIT press, 2005.

