本质矩阵基本矩阵单应矩阵标定等
参考:十四讲,学习opencv,标定原理,
总结
标定:已知世界坐标系平面内的三维坐标和像素坐标,求解内参和外参;
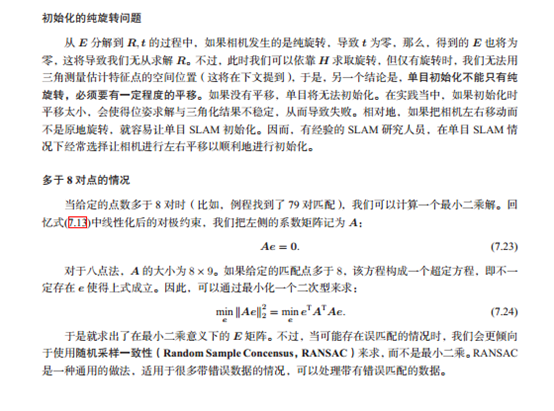
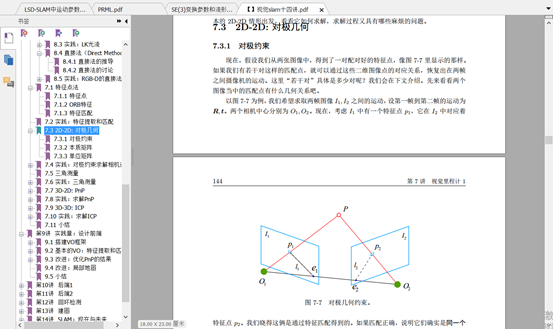
本质矩阵和基本矩阵:已知内参和两幅图像中对应点的坐标,通过对极约束(八点法,尺度等价性,齐次坐标)求解相机的运动R和t(用到RANSAC);
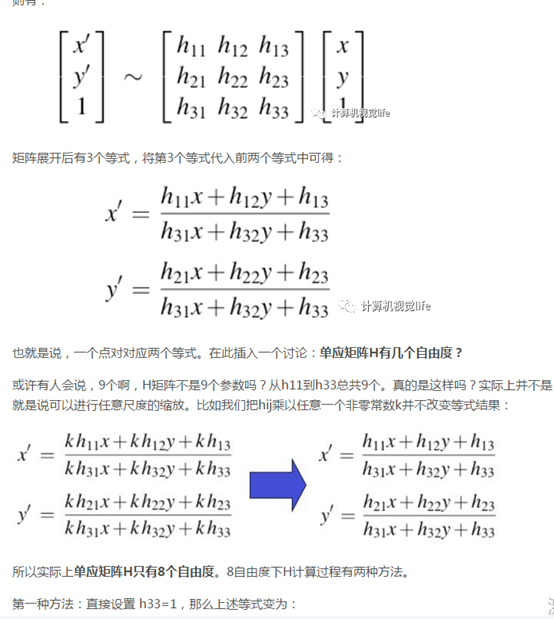
单应矩阵:根据同一平面上的点在不同图像上的坐标,得到对应的变换关系(十四讲);
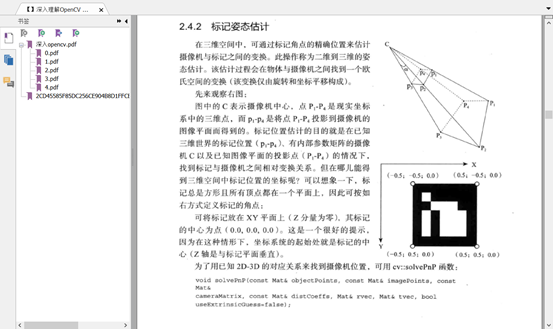
PNP:根据三维空间点的坐标和他们的投影坐标(归一化平面坐标),估计相机的位姿(用到BA);
ICP:得到三维点云的变换关系(使用SVD);
尺度等价性:
十四讲
相机模型(针孔相机模型)
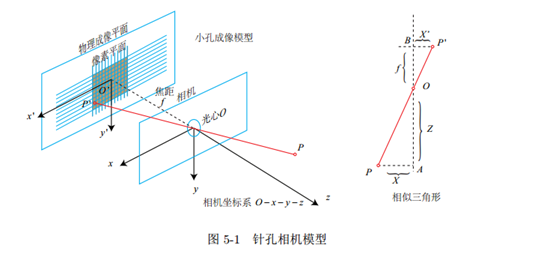
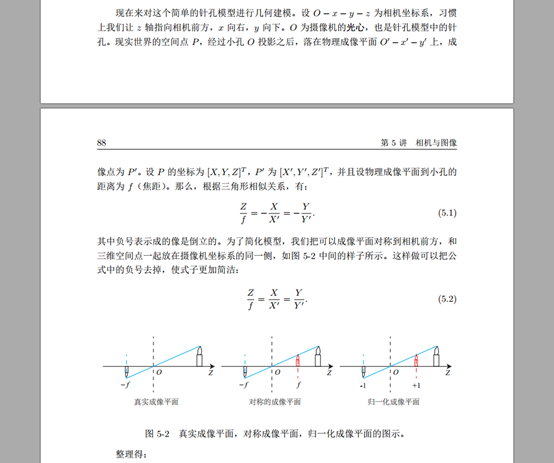
注意:相机坐标系和成像平面;把成像平面对称到相机前方,去掉负号;
像素坐标系的定义,

像素坐标(分辨率作为比例系数,以左上角作为原点就要加上偏移量),
内参数矩阵(分辨率和偏移量)
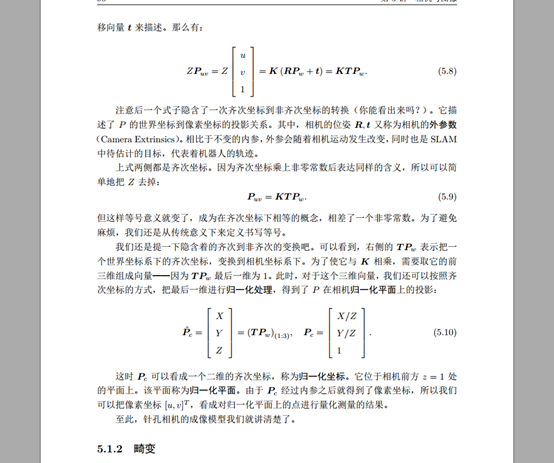
P是点在相机坐标系中的坐标;
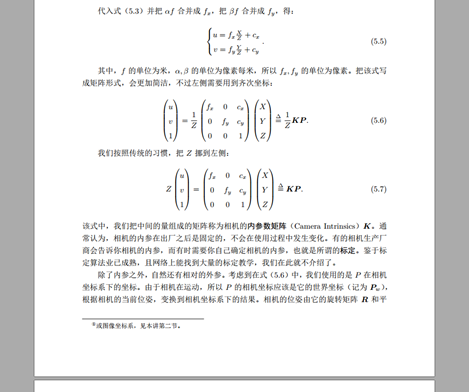
Pw是点在世界坐标系中的坐标;需要使用一个刚体变换(外参);
使用齐次坐标来描述;
将相机坐标系中的坐标归一化到归一化平面
标定原理;
【】OPENCV立体标定
二代标定原理
单应矩阵H的求解(最小奇异值的特征向量)(参考二代标定原理)
因为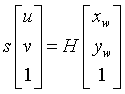 ,根据牙齿二代参考的浙大论文,可以采用最小平方差方法来计算单应性矩阵H的值。令
,根据牙齿二代参考的浙大论文,可以采用最小平方差方法来计算单应性矩阵H的值。令 ,
, ,则有
,则有 ,所以向量y与向量Hx平行,所以有
,所以向量y与向量Hx平行,所以有 (3)
(3)
成立(叉乘)。将H用行向量表示成 ,所以(3)可以化为
,所以(3)可以化为 ,又该式子中只有两个是线性无关的,该式可进一步化为
,又该式子中只有两个是线性无关的,该式可进一步化为 (4)
(4)
将(4)式转置可得 ,并改写成矩阵运算形式:
,并改写成矩阵运算形式: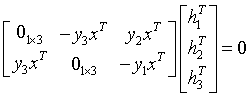 (5),
(5),
 表示矩阵[0 0 0];
表示矩阵[0 0 0];
对于标定板上每个方格的角点,都有上面的两个等式成立,因此有n个点时,可以建立n个类似(5)的方程组,合并这n个方程组,可得
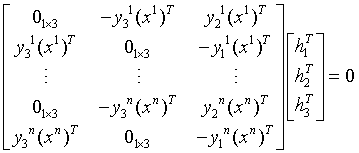 (6)
(6)
这样,求解H的问题就变成了求解次线性方程组(6)的问题,利用奇异值分解即可求出 ,
, ,
, 的值,则H得解。
的值,则H得解。
具体解法:
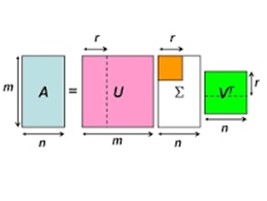
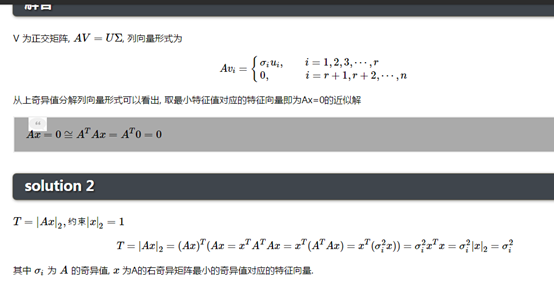
已知: 已知 A∈Rm×n,m≥nA∈Rm×n,m≥n
问题: Ax=0Ax=0 的解
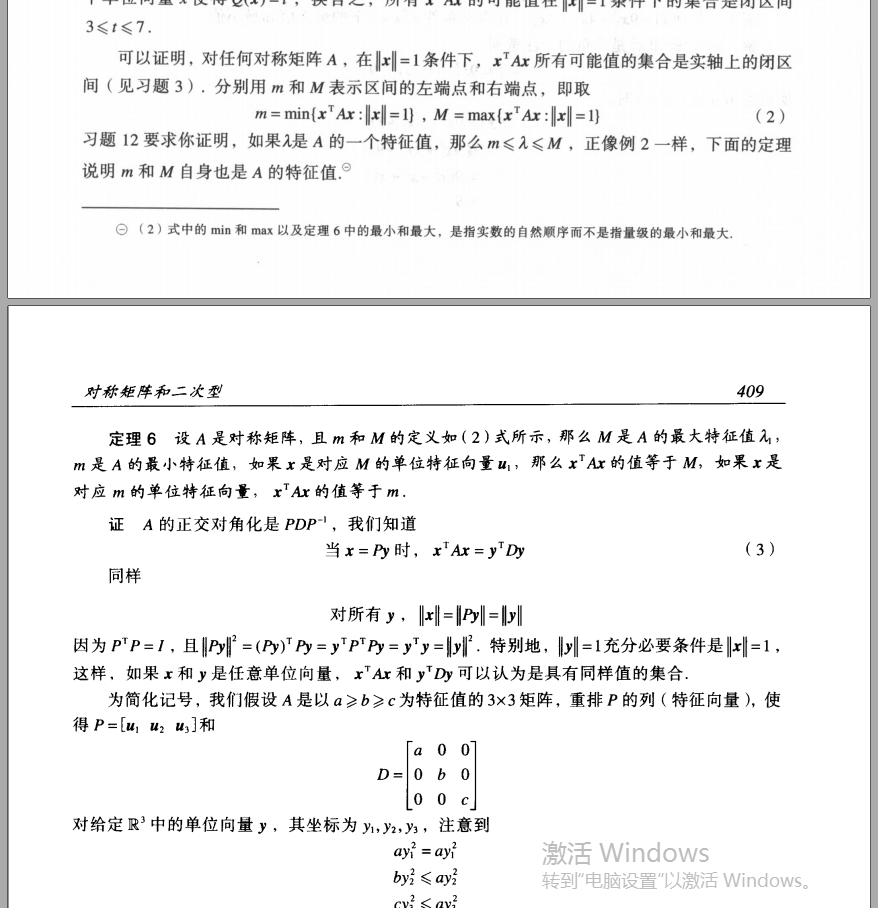
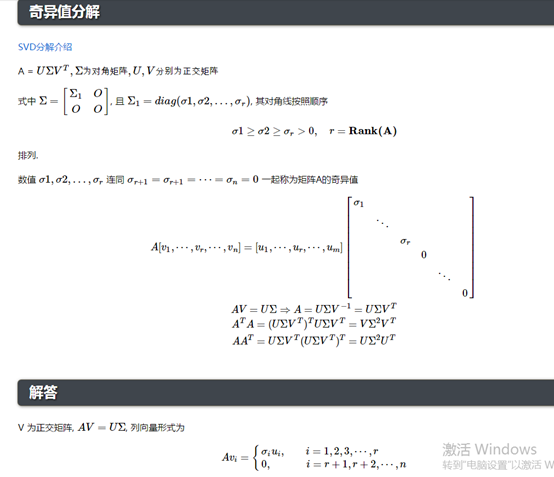
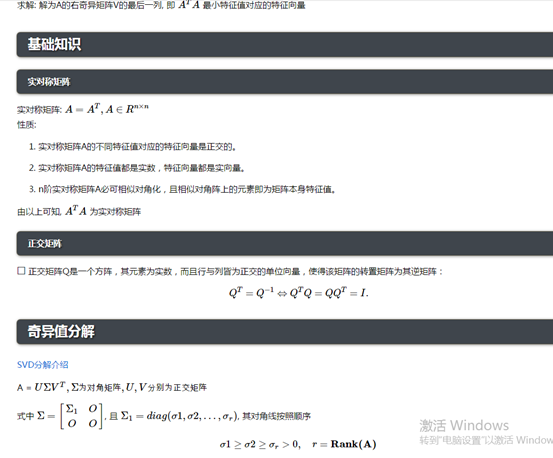
求解: 解为A的右奇异矩阵V的最后一列, 即 ATAATA 最小特征值对应的特征向量(参考:线性代数及其应用:二次型:定理6)
公式推导
相机模型中一般要用到三个坐标系:成像平面参考坐标系、相机参考坐标系和世界坐标系。
- 世界坐标系:
是在物体(标定板)环境中选择的一个基准坐标系,二代采用的张正友标定方法都以标定板的方格角点为原点,方格的两边为x、y轴,垂直于标定板为z轴建立直角坐标系。度量单位为mm。
- 相机参考坐标系:
以相机的光心为原点,平行于图像平面的两条垂直边界的方向为x、y轴,相机主光轴为z轴建立三维直角坐标系。度量单位为mm。
- 成像平面参考坐标系:
以图像平面的主点为原点(主光轴与图像平面交点),建立图像平面的两条垂直边界为x、y轴建立二维直角坐标系。度量单位为像素。
设世界坐标系中标定板上的一点M的坐标为
 ,它在相机参考坐标系中的坐标为
,它在相机参考坐标系中的坐标为 ,则它们之间的转换关系为
,则它们之间的转换关系为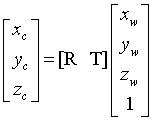 ,
, 是一个3X3的正交矩阵,表示两个坐标系之间的旋转关系,T为一个3X1矩阵,表示两个坐标系之间的平移关系。由于R是正交矩阵,因此组成R的9个数中只有三个参数独立,而组成T的三个数则都独立。由于[R T]矩阵只与摄像机相对于物体的位置有关,因此[R T]称为摄像机的外参矩阵,[R T]的六个独立参数称为摄像机的外参。
是一个3X3的正交矩阵,表示两个坐标系之间的旋转关系,T为一个3X1矩阵,表示两个坐标系之间的平移关系。由于R是正交矩阵,因此组成R的9个数中只有三个参数独立,而组成T的三个数则都独立。由于[R T]矩阵只与摄像机相对于物体的位置有关,因此[R T]称为摄像机的外参矩阵,[R T]的六个独立参数称为摄像机的外参。
设点M以摄像机光心为投影中心,在成像平面参考坐标系上投影点的坐标为
 ,则由相机参考坐标系投影到成像平面参考坐标系之间的转换关系为
,则由相机参考坐标系投影到成像平面参考坐标系之间的转换关系为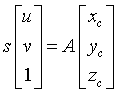 ,s为放缩因子,A是一个3X3矩阵,
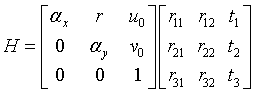
,s为放缩因子,A是一个3X3矩阵,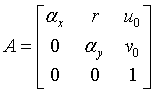 ,共有5个未知参数,因为这五个参数均只与摄像机的参数有关,称为摄像机的内参矩阵。所以由世界坐标系到成像平面参考坐标系的变换关系可以表示为:
,共有5个未知参数,因为这五个参数均只与摄像机的参数有关,称为摄像机的内参矩阵。所以由世界坐标系到成像平面参考坐标系的变换关系可以表示为: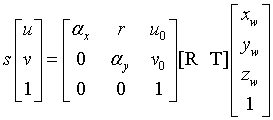 即
即
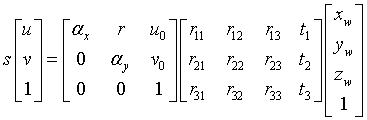 (1)
(1)
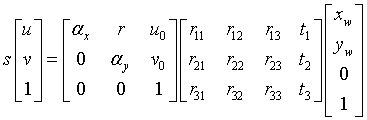
,由于标定板所有点都在z=0的平面上,所以
 ,所以(1)式又可以写成
,所以(1)式又可以写成
 ,化简得
,化简得
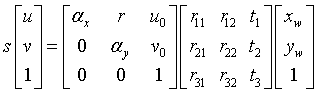 (2)
(2)
记
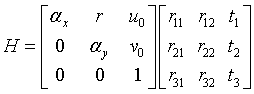 ,则H为一个3X3矩阵,称为单应矩阵。
,则H为一个3X3矩阵,称为单应矩阵。
摄像机内参的求解
依据:旋转矩阵的列向量正交
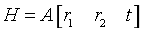
在已知H以后就可以由
 求解摄像机的内外参了。将左式写成
求解摄像机的内外参了。将左式写成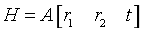 的形式,将A变换到式子左边,可得
的形式,将A变换到式子左边,可得 即
即 (7)
(7)
,因为
 ,
, 是正交矩阵R的列向量,即
是正交矩阵R的列向量,即 与
与 是单位正交向量,所以有下式成立:
是单位正交向量,所以有下式成立: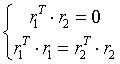 ,代入(7)式可得
,代入(7)式可得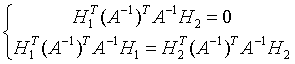 (8)
(8)
,令
 ,因为B是对称矩阵,所以只有
,因为B是对称矩阵,所以只有 六个数是独立的,类比矩阵二次型,可以知道
六个数是独立的,类比矩阵二次型,可以知道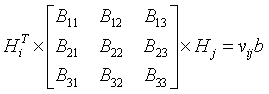 (9)
(9)
其中

所以利用(9)式,可以将(8)式表示为
 ,化成矩阵形式
,化成矩阵形式
 (10),由于(10)式中b有6个未知数,而该式只相当于两个方程,所以需要三组不同位置求解出的H,获得3个类似(10)的式子并联立,就能求解出b。(因为b中的六个未知数由摄像机内参决定,与摄像机位置无关,所以可以利用三个不同位置拍摄标定板,并求解出三个H来求b)。
(10),由于(10)式中b有6个未知数,而该式只相当于两个方程,所以需要三组不同位置求解出的H,获得3个类似(10)的式子并联立,就能求解出b。(因为b中的六个未知数由摄像机内参决定,与摄像机位置无关,所以可以利用三个不同位置拍摄标定板,并求解出三个H来求b)。
求出b以后就可以得到B,因为
 ,
,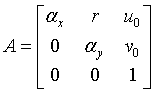 ,设B的第i行第j列为
,设B的第i行第j列为 ,则A的五个未知数可以表示为
,则A的五个未知数可以表示为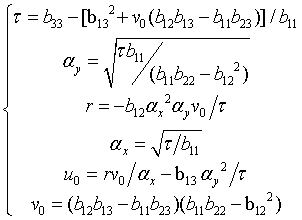 ,即摄像机内参得解。
,即摄像机内参得解。
摄像机外参的求解
由
 ,可得
,可得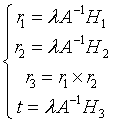 ,其中
,其中 ,(乘以
,(乘以 的原因:
的原因:
因为前面解得的H是利用向量y与向量Hx平行的条件,即
 ,这里求解出的H只是被y与向量Hx平行这个条件约束,若H乘上一个常数,它仍然满足这个约束条件,
,这里求解出的H只是被y与向量Hx平行这个条件约束,若H乘上一个常数,它仍然满足这个约束条件, 仍成立,因此求解出的H应该是真实的H乘上一个常数比例因子K,1.4中利用H求解内参时k可以被约掉不影响结果,而这里由于
仍成立,因此求解出的H应该是真实的H乘上一个常数比例因子K,1.4中利用H求解内参时k可以被约掉不影响结果,而这里由于 ,
, 都是单位向量,所以由
都是单位向量,所以由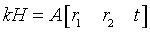 可知
可知 ,所以
,所以 )。
)。
求解H的SVD解释
https://www.cnblogs.com/nowgood/p/jie-ax--0.html
opencv实现
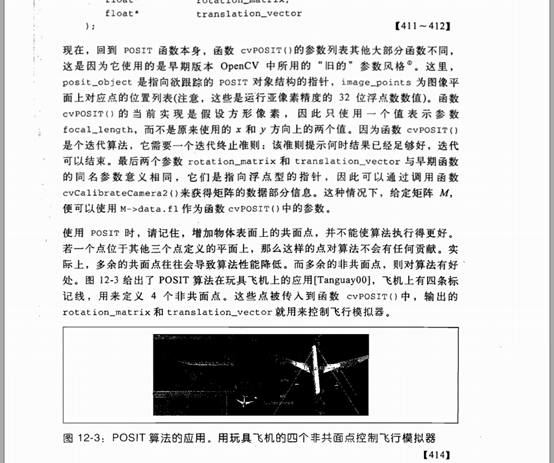
POSIT算法
一下来自《学习opencv》
RANSAC算法
随机采样一致性,用于