使用Qt opengl 显示机械手模型【Robotics_openGL_simulation】
【Robotics_openGL_simulation】
加载模型文件
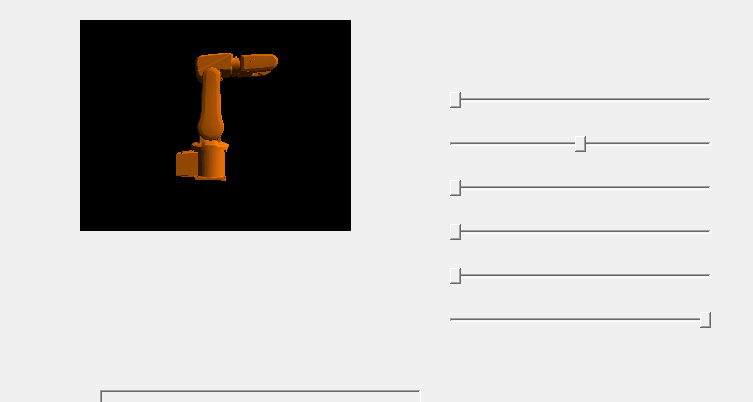
文件中点的坐标都是以世界坐标系作为原点,给动画制作带来麻烦;需要在初始状态下转换到连杆自身坐标系下;
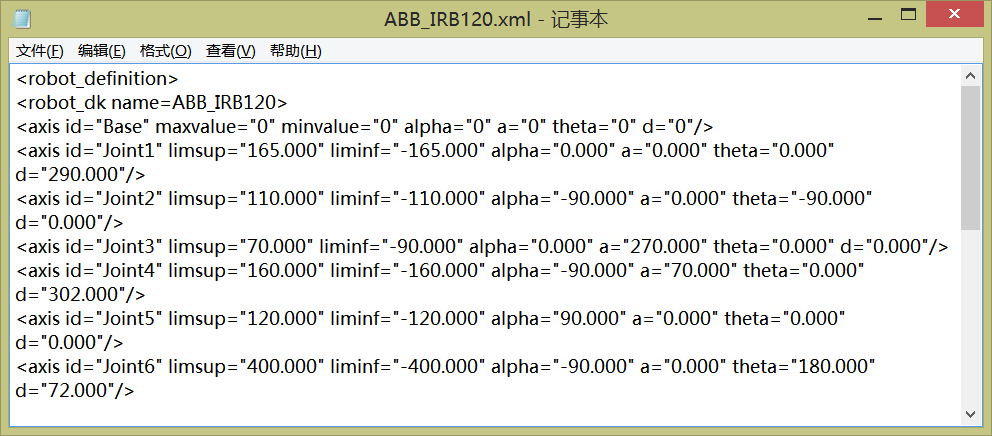
机器人的配置文件中已经给出了机器人的关节参数为DH参数;


【Robotics_openGL_simulation】
加载模型文件
文件中点的坐标都是以世界坐标系作为原点,给动画制作带来麻烦;需要在初始状态下转换到连杆自身坐标系下;
机器人的配置文件中已经给出了机器人的关节参数为DH参数;

【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】凌霞软件回馈社区,博客园 & 1Panel & Halo 联合会员上线
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】博客园社区专享云产品让利特惠,阿里云新客6.5折上折
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步