GCC嵌入式开发
 gcc嵌入式开发入门
gcc嵌入式开发入门
1.编译器和IDE介绍
最早刚入门单片机开发的时候,用的最多的就是KEIL开发,但是随着现在的编辑软件不断丰富,类似于KEIL这种偏上世纪的界面编写代码的时候已经十分不优雅了。
而仔细刨析下KEIL可以发现,KEIL主要是由一个名为ARMCC的编译器搭建起来的IDE(以下KEIL主要已MDK-ARM说明,C51版本只是编译器略有差异)。
目前比较主流使用的两个IDE:KEIL IAR。均有专门的编译器和开发环境。而开源免费的C语言编译器GCC并无特定的IDE,所以目前一些芯片厂商基于这个特性再结合eclipse这个开源的IDE就可以做出自己公司芯片专属的一体化IDE。例如STM32CubeIDE就是这样的。
对此以上的特性,为何我们不可以自己搭建一个关于GCC编译器的开发平台。
2.准备工作
其实前期有写过关于GCC编译器相关的文章,当时主要介绍了利用CMake和GCC搭建Window开发C/C++环境。
cmake开发环境--msys2搭建 - 一月一星辰 - 博客园 (cnblogs.com)
这次主要介绍GCC搭建ARM系列单片机开发环境。
安装环境
-
arm-none-eabi-gcc
Downloads | GNU Arm Embedded Toolchain Downloads – Arm Developer
解压完后在用户环境变量中添加:

-
MinGW
Download File List - MinGW - Minimalist GNU for Windows - OSDN
这里这个软件网络不好特别难安装,建议使用资料包所提供的。
解压完后在用户环境变量中添加:

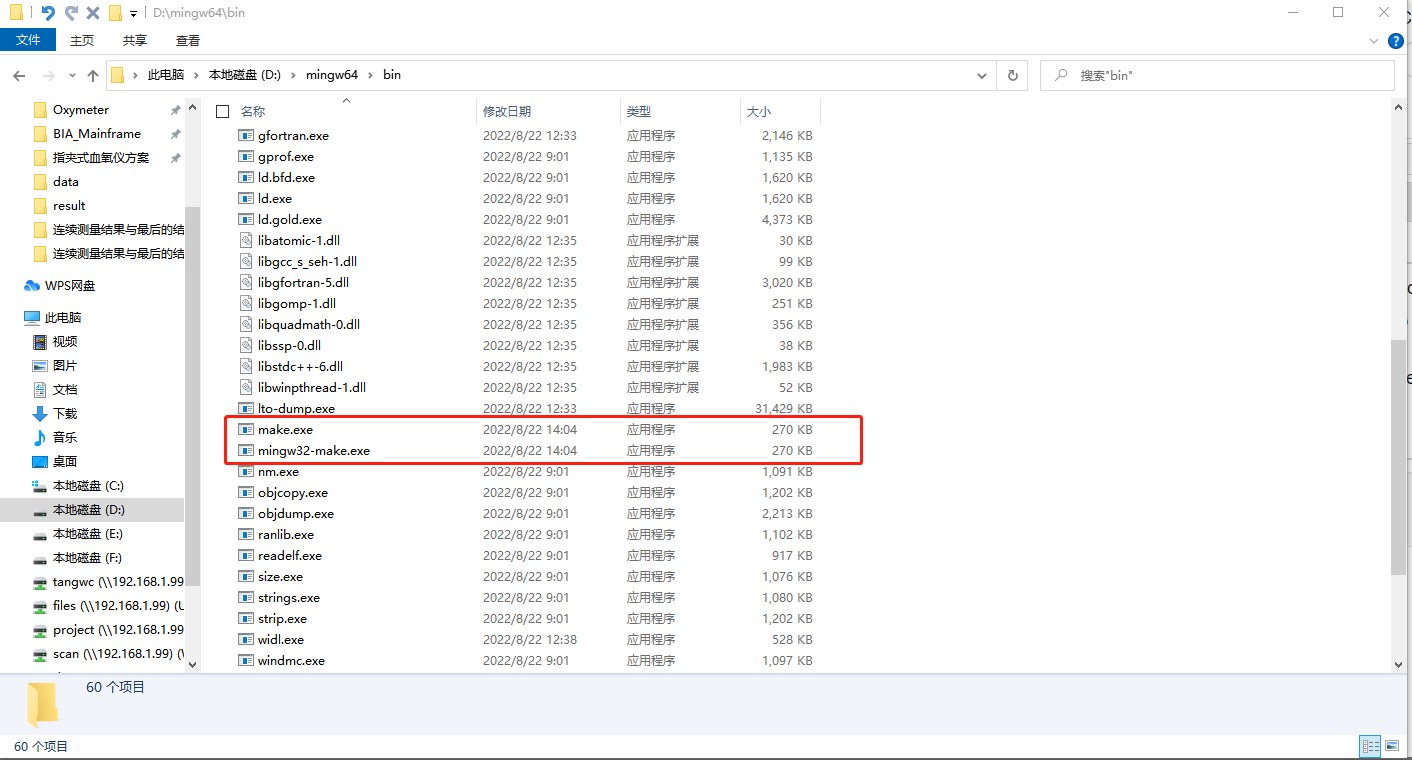
这里打开mingw64\bin 路径下找到mingw32-make.exe复制一个相同的文件并改名为make.exe
-
VScode
用于代码编辑界面,直接去官网下载最新版本即可安装好相关C/C++插件即可。
源码工程下载
到芯片官网或者找相关厂商要到SDK包,这里用MM32G0001举例,之前样片申请搞到了MM32G0001开发板,而且官网也没有相关GCC开发的DEMO,正好可以拿来试试手。
3.开始移植和编译
这里编译主要是将C代码编译成二进制文件并且写入单片机当作。主要流程为 编译 -----> 链接 ------>生成二进制。
但是由于当前这个SDK当作并没有相关的编译执行文件和链接文件,而且单片机代码头部一般为复位函数和相关中断函数的入口,这里一般会有一个启动文件(参考KEIL环境下启动文件.S)所以在正式开始移植前需要将这些工作做好。
Makefile编写
主要在STM32CubeMX生成出来的文件上进行修改:
-
工程基础信息
# 项目编译目标名 TARGET = MM32G0001_DEMO # 调试信息 DEBUG = 1 # 优化等级 OPT = -Og # 链接时优化 LTO = -flto # 编译临时文件目录 BUILD_DIR = build EXEC_DIR = build_exec -
头文件和源文件导入
这里与STM32CubeMX生成的略有不同,结构更加分层和模块化。
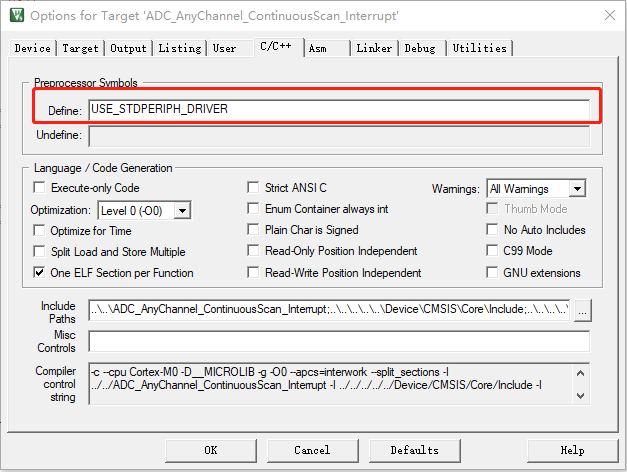
宏定义和keil环境下所定义的对齐,且要加上-D
# 模块导入 Core_DIR = Core include Core/Core.mk Device_DIR = Device include Device/Device.mk # C补充头文件路径 C_INCLUDES += # C补充源代码路径 C_SOURCES += # C源文件宏定义 C_DEFS += -DUSE_STDPERIPH_DRIVER # 汇编文件宏定义 AS_DEFS += # 汇编头文件目录 AS_INCLUDES += # 汇编源文件(starup) ASM_SOURCES += starup_mm32g0001_gcc.s如图在统计文件夹下分别添加与文件夹相同命名的.mk文件,并在主Makefile中添加导入
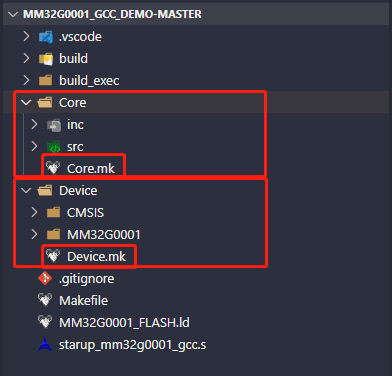
相应的.mk文件分别添加当前文件夹中的.c .h的目录,这里展示一个
# 模块名_DIR 是上一层传递下来的参数, # 是从工程根目录到该模块文件夹的路径 # 向 C_SOURCES 中添加需要编译的源文件 这里会包含当前目录下所有的.c文件 C_SOURCES += $(wildcard $(Device_DIR)/MM32G0001/HAL_Lib/src/*.c) C_SOURCES += $(wildcard $(Device_DIR)/MM32G0001/Source/*.c) # 向 C_INCLUDES 中添加头文件路径 C_INCLUDES += -I$(Device_DIR)/MM32G0001/HAL_Lib/inc C_INCLUDES += -I$(Device_DIR)/MM32G0001/Include C_INCLUDES += -I$(Device_DIR)/CMSIS/Core/Include -
编译器指定
PREFIX = arm-none-eabi- # 启用下一项以指定GCC目录 不启动则使用默认环境变量中的gcc路径 # GCC_PATH = ifdef GCC_PATH CC = $(GCC_PATH)/$(PREFIX)gcc AS = $(GCC_PATH)/$(PREFIX)gcc -x assembler-with-cpp CP = $(GCC_PATH)/$(PREFIX)objcopy DUMP = $(GCC_PATH)/$(PREFIX)objdump SZ = $(GCC_PATH)/$(PREFIX)size else CC = $(PREFIX)gcc AS = $(PREFIX)gcc -x assembler-with-cpp CP = $(PREFIX)objcopy DUMP = $(PREFIX)objdump SZ = $(PREFIX)size endif HEX = $(CP) -O ihex BIN = $(CP) -O binary -S -
目标单片机配置信息
MM32G0001为ARM Cortex-M0处理器 无浮点运算单元。
# cpu CPU = -mcpu=cortex-m0 # fpu FPU = #none # float-abi FLOAT-ABI = #none # mcu MCU = $(CPU) -mthumb $(FPU) $(FLOAT-ABI) # compile gcc flags ASFLAGS = $(MCU) $(AS_DEFS) $(AS_INCLUDES) $(OPT) -Wall -fdata-sections -ffunction-sections CFLAGS += $(MCU) $(C_DEFS) $(C_INCLUDES) $(OPT) -Wall -fdata-sections -ffunction-sections ifeq ($(DEBUG), 1) CFLAGS += -g -gdwarf-2 endif # Generate dependency information CFLAGS += -MMD -MP -MF"$(@:%.o=%.d)" -
链接说明
# 向 LIBDIR 中添加静态库文件路径 # LIBDIR += -L$(Libraries_DIR)/Lib # 向 LIBS 中添加需要链接的静态库 # LIBS += -lxxxx # link script LDSCRIPT = MM32G0001_FLASH.ld # 链接库 LIBS += -lc -lm -lnosys # 库文件路径 LIBDIR += # libraries LDFLAGS = $(MCU) -specs=nano.specs -T$(LDSCRIPT) $(LIBDIR) $(LIBS) -Wl,-Map=$(BUILD_DIR)/$(TARGET).map,--cref -Wl,--gc-sections \ -ffunction-sections --specs=nosys.specs $(LTO) # printf float 打印浮点数 (rom 太小不开启) # LDFLAGS += -lc -lrdimon -u _printf_float # cStandard CMODE = c99 # cppStandard CPPMODE = c++11 # default action: build all all: $(EXEC_DIR)/$(TARGET).elf $(EXEC_DIR)/$(TARGET).hex $(EXEC_DIR)/$(TARGET).bin POST_BUILD -
编译过程和链接过程
# list of objects OBJECTS += $(addprefix $(BUILD_DIR)/,$(notdir $(C_SOURCES:.c=.o))) vpath %.c $(sort $(dir $(C_SOURCES))) # list of ASM program objects OBJECTS += $(addprefix $(BUILD_DIR)/,$(notdir $(ASM_SOURCES:.s=.o))) vpath %.s $(sort $(dir $(ASM_SOURCES))) $(BUILD_DIR)/%.o: %.c Makefile | $(BUILD_DIR) @echo "[CC] $< -> $@" @$(CC) -c $(CFLAGS) -Wa,-a,-ad,-alms=$(BUILD_DIR)/$(notdir $(<:.c=.lst)) $< -o $@ -std=$(CMODE) $(BUILD_DIR)/%.o: %.s Makefile | $(BUILD_DIR) @echo "[AS] $< -> $@" @$(AS) -c $(CFLAGS) $< -o $@ $(EXEC_DIR)/$(TARGET).elf: $(OBJECTS) Makefile | $(EXEC_DIR) @echo "[LD] $(OBJECTS) -> $@" @$(CC) $(OBJECTS) $(LDFLAGS) -o $@ $(EXEC_DIR)/%.hex: $(EXEC_DIR)/%.elf | $(EXEC_DIR) @echo "[HEX] $< -> $@" @$(HEX) $< $@ $(EXEC_DIR)/%.bin: $(EXEC_DIR)/%.elf | $(EXEC_DIR) @echo "[BIN] $< -> $@" @$(BIN) $< $@ $(BUILD_DIR): @mkdir $@ $(EXEC_DIR): @mkdir $@ .PHONY: POST_BUILD POST_BUILD: $(EXEC_DIR)/$(TARGET).elf ifeq ($(DEBUG), 1) @echo "[DUMP] $< -> $(EXEC_DIR)/$(TARGET).s" @$(DUMP) -d $< > $(EXEC_DIR)/$(TARGET).s endif @echo "[SIZE] $<" @$(SZ) $< @echo -e "------Build Finish------" -
清理过程文件和其他
####################################### # 清除临时文件 ####################################### .PHONY: clean clean: -del $(BUILD_DIR) @echo -e "------Clean Build Finish------" .PHONY: cleanall cleanall: clean -del $(EXEC_DIR) @echo -e "------Clean Exec Finish------" ####################################### # 依赖文件 ####################################### -include $(wildcard $(BUILD_DIR)/*.d)
启动文件(.s)编写
选择一个同为ARM Cortex-M0处理器的启动文件,看代码说明,前半部分主要是复位回调函数的内容,直接拿来就可以直接使用
.syntax unified
.cpu cortex-m0
.fpu softvfp
.thumb
.global g_pfnVectors
.global Default_Handler
/* start address for the initialization values of the .data section.
defined in linker script */
.word _sidata
/* start address for the .data section. defined in linker script */
.word _sdata
/* end address for the .data section. defined in linker script */
.word _edata
/* start address for the .bss section. defined in linker script */
.word _sbss
/* end address for the .bss section. defined in linker script */
.word _ebss
/**
* @brief This is the code that gets called when the processor first
* starts execution following a reset event. Only the absolutely
* necessary set is performed, after which the application
* supplied main() routine is called.
* @param None
* @retval None
*/
.section .text.Reset_Handler
.weak Reset_Handler
.type Reset_Handler, %function
Reset_Handler:
ldr r0, =_estack
mov sp, r0 /* set stack pointer */
/* Call the clock system initialization function.*/
bl SystemInit
/* Copy the data segment initializers from flash to SRAM */
ldr r0, =_sdata
ldr r1, =_edata
ldr r2, =_sidata
movs r3, #0
b LoopCopyDataInit
CopyDataInit:
ldr r4, [r2, r3]
str r4, [r0, r3]
adds r3, r3, #4
LoopCopyDataInit:
adds r4, r0, r3
cmp r4, r1
bcc CopyDataInit
/* Zero fill the bss segment. */
ldr r2, =_sbss
ldr r4, =_ebss
movs r3, #0
b LoopFillZerobss
FillZerobss:
str r3, [r2]
adds r2, r2, #4
LoopFillZerobss:
cmp r2, r4
bcc FillZerobss
/* Call static constructors */
bl __libc_init_array
/* Call the application s entry point.*/
bl main
LoopForever:
b LoopForever
.size Reset_Handler, .-Reset_Handler
/**
* @brief This is the code that gets called when the processor receives an
* unexpected interrupt. This simply enters an infinite loop, preserving
* the system state for examination by a debugger.
*
* @param None
* @retval None
*/
.section .text.Default_Handler,"ax",%progbits
Default_Handler:
Infinite_Loop:
b Infinite_Loop
.size Default_Handler, .-Default_Handler
后面关于向量表,需要根据实际的应用手册上进行改写,不同芯片虽然使用同一内核,但是很多功能有被阉割或者是增加。可以根据官方给出的KEIL环境下的启动文件进行改写,改写完如下。
/******************************************************************************
*
* The minimal vector table for a Cortex M0. Note that the proper constructs
* must be placed on this to ensure that it ends up at physical address
* 0x0000.0000.
*
******************************************************************************/
.section .isr_vector,"a",%progbits
.type g_pfnVectors, %object
.size g_pfnVectors, .-g_pfnVectors
g_pfnVectors:
.word _estack /* Top of Stack */
.word Reset_Handler /* Reset Handler */
.word NMI_Handler /* Hard Fault Handler */
.word HardFault_Handler /* MPU Fault Handler */
.word MemManage_Handler /* Bus Fault Handler */
.word BusFault_Handler /* Usage Fault Handler */
.word UsageFault_Handler /* Reserved */
.word 0 /* Reserved */
.word 0 /* Reserved */
.word 0 /* Reserved */
.word 0 /* Reserved */
.word SVC_Handler /* SVCall Handler */
.word 0 /* Reserved */
.word 0 /* Reserved */
.word PendSV_Handler /* PendSV Handler */
.word SysTick_Handler /* SysTick Handler */
.word IWDG_IRQHandler /* 0 Watch Dog Timer Interrupt Handler */
.word PVD_IRQHandler /* 1 PVD through EXTI Line detect */
.word 0 /* 2 Reserved */
.word FLASH_IRQHandler /* 3 FLASH Interrupt Handler */
.word RCC_IRQHandler /* 4 RCC Interupt Handler */
.word EXTI0_1_IRQHandler /* 5 EXTI Line 0 and 1 */
.word EXTI2_3_IRQHandler /* 6 EXTI Line 2 and 3 */
.word EXTI4_15_IRQHandler /* 7 EXTI Line 4 to 15 */
.word 0 /* 8 Reserved */
.word 0 /* 9 Reserved */
.word 0 /* 10 Reserved */
.word 0 /* 11 Reserved */
.word ADC1_IRQHandler /* 12 ADC Interrupt Handler */
.word TIM1_BRK_UP_TRG_COM_IRQHandler /* 13 TIM1 Break, Update, Trigger and Commutation */
.word TIM1_CC_IRQHandler /* 14 TIM1 Capture Compare */
.word 0 /* 15 Reserved */
.word TIM3_IRQHandler /* 16 General Timer1 Interrupt Handler */
.word 0 /* 17 Reserved */
.word 0 /* 18 Reserved */
.word TIM14_IRQHandler /* 19 General Timer14 Interrupt Handler */
.word 0 /* 20 Reserved */
.word 0 /* 21 Reserved */
.word 0 /* 22 Reserved */
.word I2C1_IRQHandler /* 23 I2C1 Interrupt Handler */
.word 0 /* 24 Reserved */
.word SPI1_IRQHandler /* 25 SPI1 Interrupt Handler */
.word 0 /* 26 Reserved */
.word USART1_IRQHandler /* 27 UART1 Interrupt Handler */
.word USART2_IRQHandler /* 28 UART2 Interrupt Handler */
.word 0 /* 29 Reserved */
.word 0 /* 30 Reserved */
.word 0 /* 31 Reserved */
/*******************************************************************************
*
* Provide weak aliases for each Exception handler to the Default_Handler.
* As they are weak aliases, any function with the same name will override
* this definition.
*
*******************************************************************************/
.weak NMI_Handler
.thumb_set NMI_Handler,Default_Handler
.weak HardFault_Handler
.thumb_set HardFault_Handler,Default_Handler
.weak MemManage_Handler
.thumb_set MemManage_Handler,Default_Handler
.weak BusFault_Handler
.thumb_set BusFault_Handler,Default_Handler
.weak UsageFault_Handler
.thumb_set UsageFault_Handler,Default_Handler
.weak SVC_Handler
.thumb_set SVC_Handler,Default_Handler
.weak PendSV_Handler
.thumb_set PendSV_Handler,Default_Handler
.weak SysTick_Handler
.thumb_set SysTick_Handler,Default_Handler
.weak IWDG_IRQHandler
.thumb_set IWDG_IRQHandler,Default_Handler
.weak PVD_IRQHandler
.thumb_set PVD_IRQHandler,Default_Handler
.weak FLASH_IRQHandler
.thumb_set FLASH_IRQHandler,Default_Handler
.weak RCC_IRQHandler
.thumb_set RCC_IRQHandler,Default_Handler
.weak EXTI0_1_IRQHandler
.thumb_set EXTI0_1_IRQHandler,Default_Handler
.weak EXTI2_3_IRQHandler
.thumb_set EXTI2_3_IRQHandler,Default_Handler
.weak EXTI4_15_IRQHandler
.thumb_set EXTI4_15_IRQHandler,Default_Handler
.weak ADC1_IRQHandler
.thumb_set ADC1_IRQHandler,Default_Handler
.weak TIM1_BRK_UP_TRG_COM_IRQHandler
.thumb_set TIM1_BRK_UP_TRG_COM_IRQHandler,Default_Handler
.weak TIM1_CC_IRQHandler
.thumb_set TIM1_CC_IRQHandler,Default_Handler
.weak TIM3_IRQHandler
.thumb_set TIM3_IRQHandler,Default_Handler
.weak TIM14_IRQHandler
.thumb_set TIM14_IRQHandler,Default_Handler
.weak I2C1_IRQHandler
.thumb_set I2C1_IRQHandler,Default_Handler
.weak SPI1_IRQHandler
.thumb_set SPI1_IRQHandler,Default_Handler
.weak USART1_IRQHandler
.thumb_set USART1_IRQHandler,Default_Handler
.weak USART2_IRQHandler
.thumb_set USART2_IRQHandler,Default_Handler
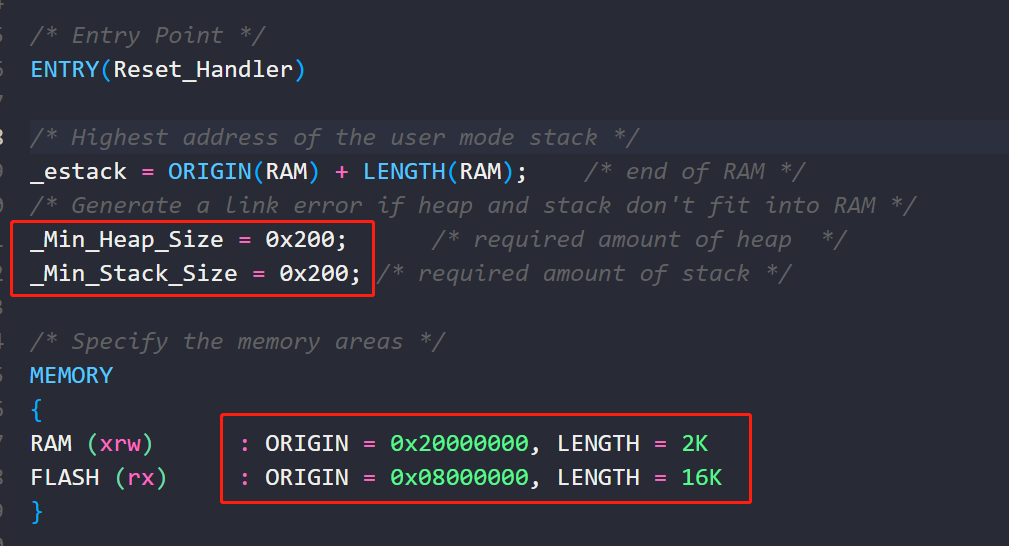
链接文件(.ld)编写
链接文件这里跟启动文件一样,找到一样内核的工程,直接copy过来就可以直接使用,注意这里唯一需要修改的就是相关ram,rom和堆栈空间大小。
在文件的开头处修改。
尝试编译和排错
这个时候就可以尝试进行编译了,在终端输入make -j12 12这个值需要根据自己的电脑的CPU数量来决定的,数量越大编译越快。
正常编译成功输出结果:
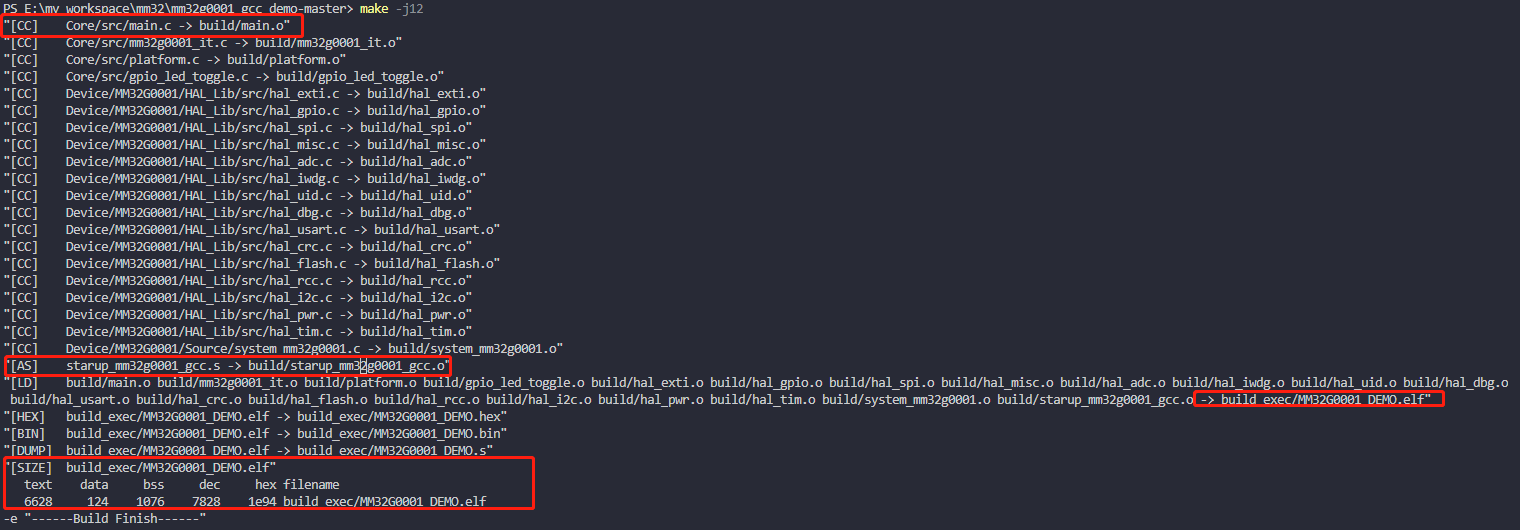
可以看到正常编译结果:.c编译成.o;.s编译成.o;所有.ol链接成.elf
并且打印出固件资源占用。
扩展:
这里如果想打包成库文件使别人调用的化,可以使用ar工具,只需要编译完成后用ar工具进行链接生成.a的库。
部分错误原因,代码中原来是armcc编译器特有的指令在gcc环境下不适用。
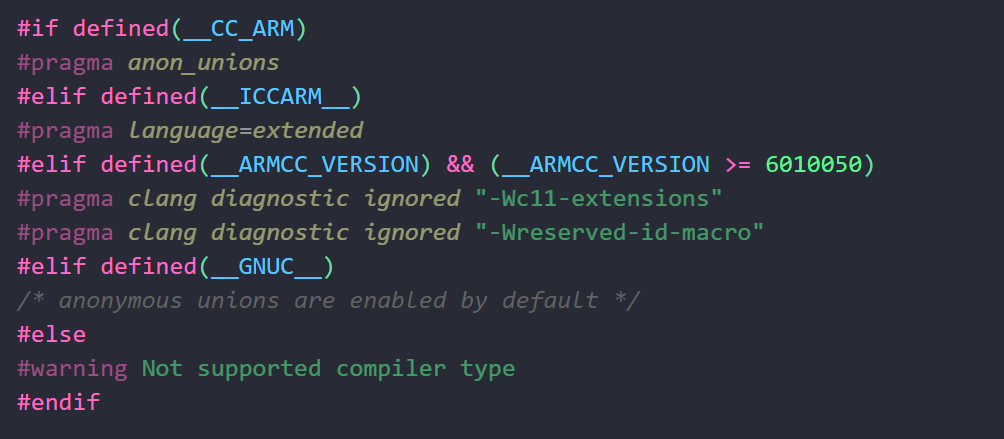
一般来说,代码中会都会有类似这种代码。
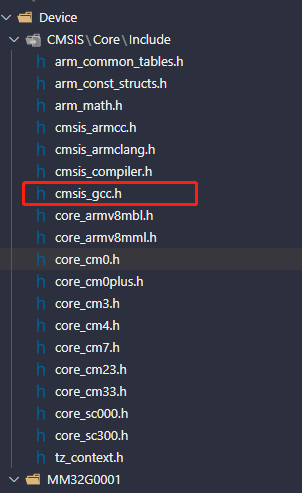
部分指令集代码。一般要包含的CMSIS头文件
4.DEBUG调试和下载
正常来说ARM单片机使用DAP-link或者jlink均可以正常下载。想在VScode中调试的话,需要借助一个插件。
建立一个launch.json文件进行如下编辑
{
// 使用 IntelliSense 了解相关属性。
// 悬停以查看现有属性的描述。
// 欲了解更多信息,请访问: https://go.microsoft.com/fwlink/?linkid=830387
"version": "0.2.0",
"configurations": [
{
"cwd": "${workspaceFolder}",
"executable": "./build_exec/CW32_DEMO.elf",// 需要烧录的elf文件
"name": "Debug with JLink",// debug 名称
"request": "launch",
"type": "cortex-debug",
"device": "CW32F030x8", // driver 信息,最好已经集成到jlink当作
"runToEntryPoint": "main", // 运行到开始main处
"showDevDebugOutput":"none",
"servertype": "jlink",// 选择下载器
"svdFile": "Tools/CW32F030.svd", // svd文件,编译查看寄存器信息
"interface": "swd" // 通信方式
}
]
}
这样就可以在VScode上愉快的debug了
第三方debug软件:Ozone。关于jlink官方的的一种工具。可以自行查找一下如何使用。
后话
通过这种方式,在大部分的情况下都可以正常使用,但在部分大工程的项目中,在debug下有时会有异常。建议debug的时候还是使用专用的软件比较好。
本文来自博客园,作者:一月一星辰,转载请注明原文链接:https://www.cnblogs.com/tangwc/p/17793356.html
