
C++API搭建Tensorrt深度解析及构建模板(构建引擎/序列化与反序列化/推理)
好久没写一篇关于使用C++ API搭建构建Tensorrt的文章了,而本篇文章该说些什么了,也不想像很多博客介绍Tensorrt的C++API,直接来几个步骤,然后如何搭建网络,构造engine,需要前提logger等。
为此,本篇博客为了减少下载什么pth,根据什么onnx等不必要麻烦,我们将从torch构建一个简单网络, 并将其转换wts格式,然后通过C++API调用wts(权重)建立如何构建tensorrt的网络的一个模板。
至于简单使用tensorrt搭建实列,可参考“使用tensorRT C++ API搭建MLP网络详解”文章,该篇文章简单介绍了visual studio环境搭建。、
一.python搭建网络,得到权重wts
因其搭建简单网络,我将不在介绍,直接根据代码可实现网络搭建,也不必要训练,直接保存pth,构建wts即可,以下为python构建wts代码。


from torch import nn import torch import struct from torchsummary import summary import numpy as np import cv2 class TRY(nn.Module): def __init__( self ): super(TRY, self).__init__() self.cov1=nn.Conv2d(3,64,3,1) self.r1=nn.ReLU(inplace=True) self.conv2=nn.Conv2d(64,2,3,1) def forward(self, x) : x = self.cov1(x) x = self.r1(x) x = self.conv2(x) return x def transform(img): img = img.astype('float32') img -= 127.5 img *= 0.0078125 img = np.transpose(img, (2, 0, 1)) img = np.expand_dims(img, axis=0) return img def infer(img=None): net = torch.load('./try.pth') net = net.cuda() net = net.eval() print('model: ', net) # print('state dict: ', net.state_dict().keys()) if img is None: tmp = torch.ones(1, 3, 224, 224).cuda() else: if isinstance(img, str): img = cv2.imread(img) tmp = transform(img) tmp = torch.from_numpy(tmp).cuda() print('input: ', tmp) out = net(tmp) out_index = torch.argmax(out).cpu().numpy() print('output_index:', out_index) summary(net, (3, 224, 224)) # return f = open("try.wts", 'w') f.write("{}\n".format(len(net.state_dict().keys()))) for k, v in net.state_dict().items(): print('key: ', k) print('value: ', v.shape) vr = v.reshape(-1).cpu().numpy() f.write("{} {}".format(k, len(vr))) for vv in vr: f.write(" ") f.write(struct.pack(">f", float(vv)).hex()) f.write("\n") def main_createnet(): print('cuda device count: ', torch.cuda.device_count()) net = TRY() net = net.eval() net = net.cuda() print(net) tmp = torch.ones(2, 3, 224, 224).cuda() out = net(tmp) print('out:', out.shape) torch.save(net, "./try.pth") if __name__ == '__main__': # main_createnet() infer(img='../dog.png')
以上代码可获得wts文件,基于此文件,我们将继续搭建tensorrt网络模板。
二.构建tensorrt网络模板
本次使用tensorrt版本为8.2左右。
搭建tensorrt网络模板前,我先推荐大神git上的code,建议读者拜读,可点击code查阅。
我将通过网络图重点介绍某些功能,具体说明已在代码中给出注释。
①构建logger信息,简单构建可用以下代码,来源于官网,不必纠结。
class Logger : public ILogger { void log(Severity severity, const char* msg) noexcept override { // suppress info-level messages if (severity <= Severity::kWARNING) std::cout << msg << std::endl; } } gLogger;
②createEngine实际内部调用torch构建网络转换为wts加载,搭建网络,并创造了engine,此时想用engine依然可以进行推理,后续将不需要转序列化/反序列化再次构建引擎engine了,但每次推理需构建引擎会很耗时间,教程将不会推荐,我也强烈建议
engine序列化方法。然我将说明无需序列化的推理,便于加深理解。具体细节如下图。
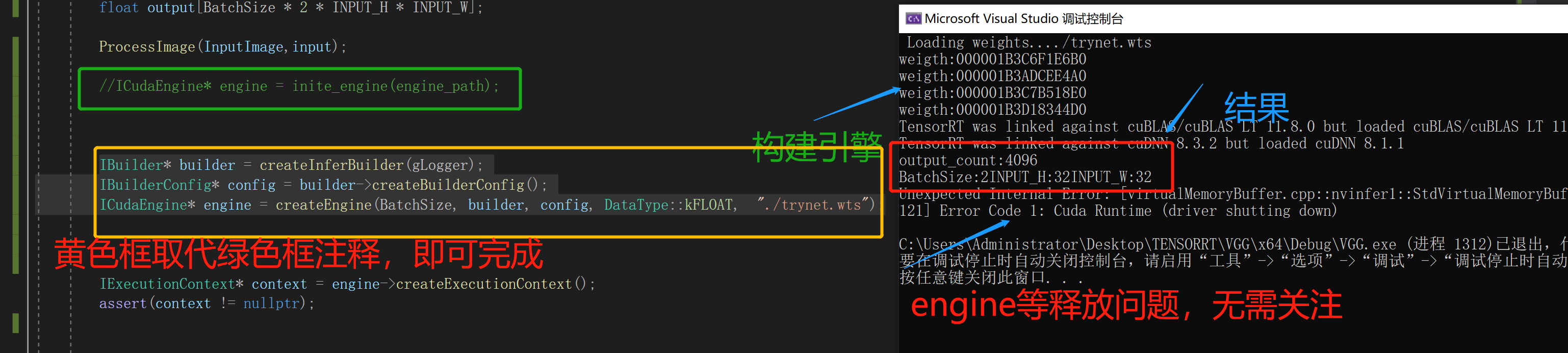
为防止读者误解,我将贴出修改后的主函数,其所有方法函数将在下面代码里。
int main() { bool serialize = false; std::string engine_path = "./model.engine"; if (serialize) { //将模型序列化 IHostMemory* modelStream{ nullptr }; modelStream = engine2serialize(); //构建引擎与保存 } else { //加载引擎,预测图片 std::string path = "./2.jpg"; cv::Mat img = cv::imread(path); if (img.empty()) { std::cout << "input images error!" << std::endl; return 0; } cv::Mat imgInput; cv::resize(img, imgInput, cv::Size(INPUT_W, INPUT_H), 0, 0, cv::INTER_LINEAR); vector<cv::Mat> InputImage; InputImage.push_back(imgInput); InputImage.push_back(imgInput); float input[BatchSize * 3 * INPUT_H * INPUT_W]; float output[BatchSize * 2 * INPUT_H * INPUT_W]; ProcessImage(InputImage,input); //ICudaEngine* engine = inite_engine(engine_path); IBuilder* builder = createInferBuilder(gLogger); IBuilderConfig* config = builder->createBuilderConfig(); ICudaEngine* engine = createEngine(BatchSize, builder, config, DataType::kFLOAT, "./trynet.wts"); IExecutionContext* context = engine->createExecutionContext(); assert(context != nullptr); doInference(*context, input, output, 2); cout << "output_count:" << sizeof(output) / sizeof(output[0]) << endl; cout << "BatchSize:" << BatchSize << "INPUT_H:" << INPUT_H << "INPUT_W:" << INPUT_W << endl; //for (int i = 0; i < BatchSize * 2 * INPUT_H * INPUT_W; i++) { // cout << i << *output << endl; //} } }
③完成引擎构建,实际可以使用IExecutionContext* context = engine->createExecutionContext();进行推理,而使用CUDA推理需将输入输出转到cuda上,因此需要数据转换,此时可用模板doInference函数,也来源别人框架。
④ APIToMode/createEngine/doInference等函数,属于基本默认方法,APIToMode函数集成并将其序列化;createEngine主要搭建网络并将其转为engine,其中搭建网络很重要;doinference函数属于如何推理,并将输入输出在
host与cuda内存传输,主要稍微修改输入输出,其它可复制。
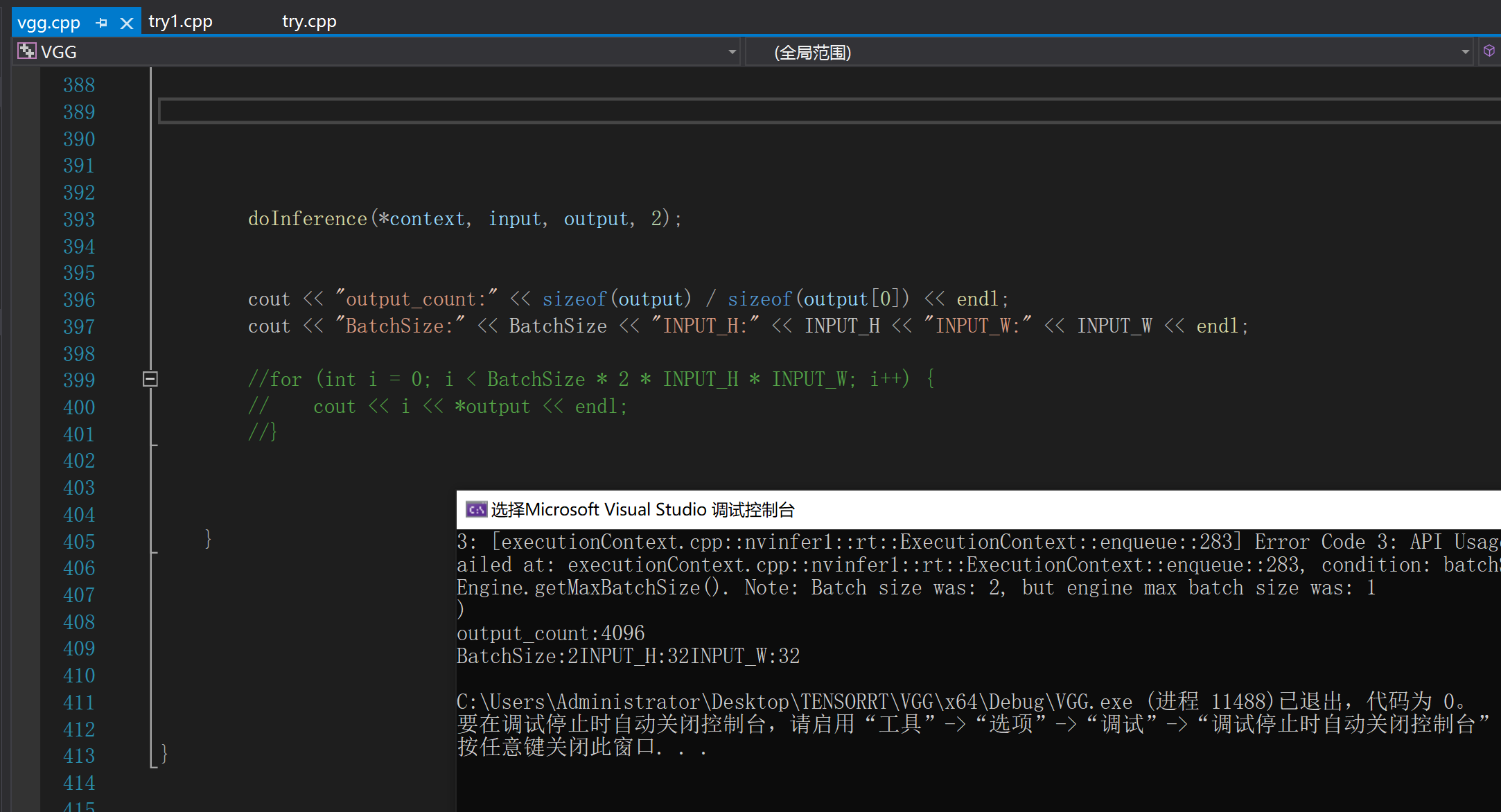
⑤ 我已验证,若构建引擎可使用batch为1,而推理可使用batch为n,构建好的引擎的序列化,推理宽高batch可任意修改。dt构建输入float32或half等数据。
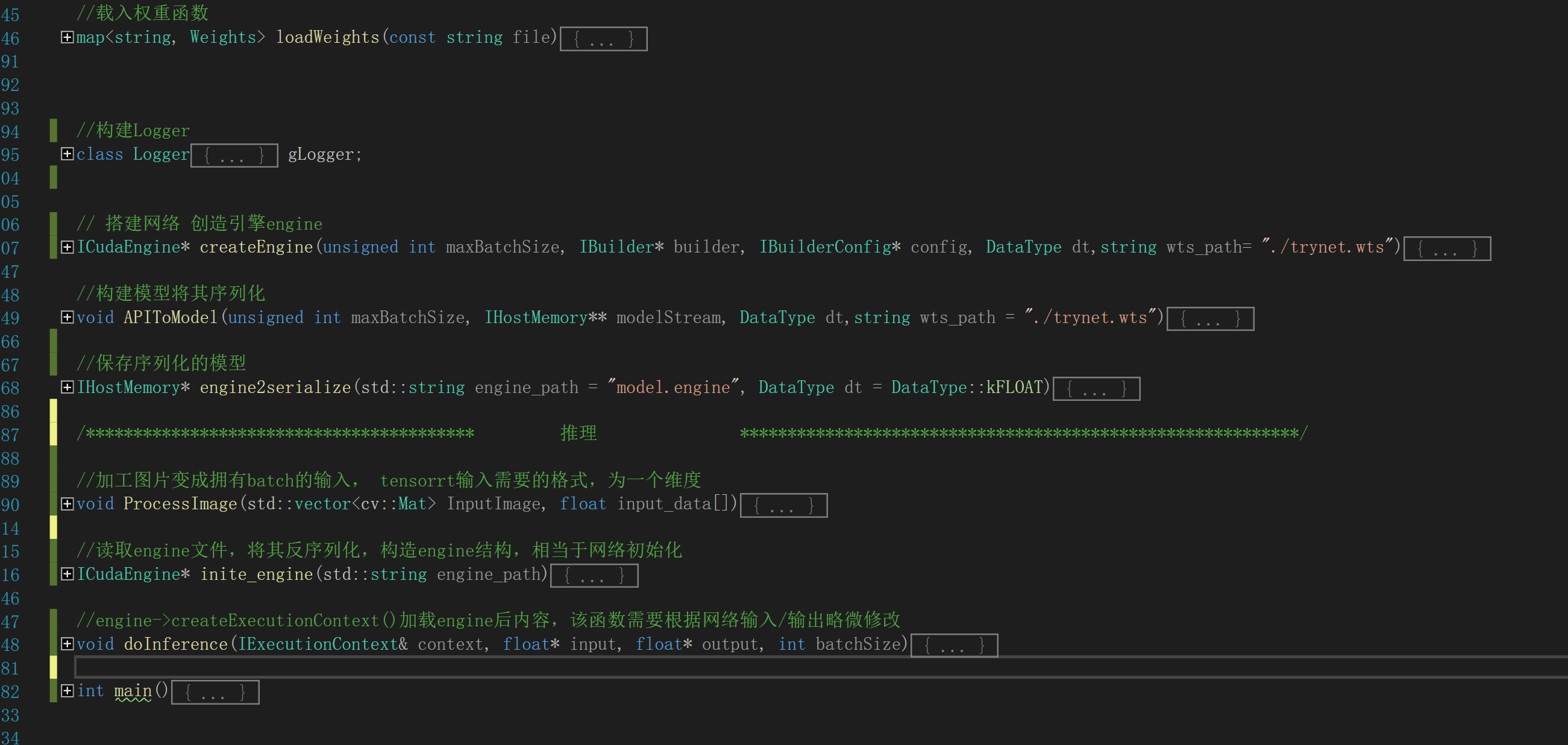
以下为具体实习tensrrt C++API基本模板。
#include "NvInferRuntimeCommon.h" #include <cassert> #include "NvInfer.h" // TensorRT library #include "iostream" // Standard input/output library #include <map> // for weight maps #include <fstream> // for file-handling #include <chrono> // for timing the execution<br> #include <assert.h> #include "NvInfer.h" #include "cuda_runtime_api.h" #include<opencv2/core/core.hpp> #include<opencv2/highgui/highgui.hpp> #include <opencv2/opencv.hpp> #include<vector> using namespace nvinfer1; using namespace std; static const int INPUT_H = 32; static const int INPUT_W = 32; static const int INPUT_C = 3; const char* INPUT_NAME = "data"; const char* OUTPUT_NAME = "pred"; static const int BatchSize = 2; //载入权重函数 map<string, Weights> loadWeights(const string file) { /* * Parse the .wts file and store weights in dict format. * @param file path to .wts file * @return weight_map: dictionary containing weights and their values */ std::cout << " Loading weights..." << file << std::endl; std::map<string, Weights> weightMap; //定义声明 // Open Weight file ifstream input(file); assert(input.is_open() && "[ERROR]: Unable to load weight file..."); int32_t count; input >> count;//右移获得第一个数据,得到有多少个权重 assert(count > 0 && "Invalid weight map file."); // Loop through number of line, actually the number of weights & biases while (count--) { // TensorRT weights Weights wt{ DataType::kFLOAT, nullptr, 0 }; uint32_t size; // Read name and type of weights std::string w_name; input >> w_name >> std::dec >> size; wt.type = DataType::kFLOAT; uint32_t* val = reinterpret_cast<uint32_t*>(malloc(sizeof(uint32_t) * size)); for (uint32_t x = 0, y = size; x < y; ++x) { // Change hex values to uint32 (for higher values) input >> std::hex >> val[x]; //hex为16进制 } wt.values = val; wt.count = size; cout << "weigth:" << val << endl; // Add weight values against its name (key) weightMap[w_name] = wt; //将权重结果保存此处 } return weightMap; } //构建Logger class Logger : public ILogger { void log(Severity severity, const char* msg) noexcept override { // suppress info-level messages if (severity <= Severity::kWARNING) std::cout << msg << std::endl; } } gLogger; #define CHECK(status) \ do\ {\ auto ret = (status);\ if (ret != 0)\ {\ std::cerr << "Cuda failure: " << ret << std::endl;\ abort();\ }\ } while (0) // 搭建网络 创造引擎 ICudaEngine* createEngine(unsigned int maxBatchSize, IBuilder* builder, IBuilderConfig* config, DataType dt,string wts_path= "./trynet.wts") { INetworkDefinition* network = builder->createNetworkV2(0U); // Create input tensor of shape { 1, 32, 32 } with name INPUT_BLOB_NAME ITensor* data = network->addInput(INPUT_NAME, dt, Dims3{ 3, INPUT_H, INPUT_W }); assert(data); std::map<std::string, Weights> weightMap = loadWeights(wts_path); IConvolutionLayer* conv1 = network->addConvolutionNd(*data, 64, DimsHW{ 3, 3 }, weightMap["cov1.weight"], weightMap["cov1.bias"]); assert(conv1); conv1->setName("cov1");//设置名字 conv1->setPaddingNd(DimsHW{ 1, 1 }); conv1 = network->addConvolutionNd(*conv1->getOutput(0), 2, DimsHW{ 3, 3 }, weightMap["cov2.weight"], weightMap["cov2.bias"]); conv1->setPaddingNd(DimsHW{ 1, 1 }); conv1->setName("cov2");//设置名字 conv1->getOutput(0)->setName(OUTPUT_NAME); network->markOutput(*conv1->getOutput(0)); // 构建引擎,其它网络都可以使用这个 builder->setMaxBatchSize(maxBatchSize); config->setMaxWorkspaceSize(1 << 20); ICudaEngine* engine = builder->buildEngineWithConfig(*network, *config); network->destroy();// Don't need the network any more 释放内存 // Release host memory for (auto& mem : weightMap) { free((void*)(mem.second.values)); } return engine; } //构建模型将其序列化 void APIToModel(unsigned int maxBatchSize, IHostMemory** modelStream, DataType dt,string wts_path = "./trynet.wts") { // Create builder IBuilder* builder = createInferBuilder(gLogger); IBuilderConfig* config = builder->createBuilderConfig(); // Create model to populate the network, then set the outputs and create an engine ICudaEngine* engine = createEngine(maxBatchSize, builder, config, dt,wts_path=wts_path); assert(engine != nullptr); // Serialize the engine (*modelStream) = engine->serialize(); // Close everything down engine->destroy(); builder->destroy(); } //保存序列化的模型 IHostMemory* engine2serialize(std::string engine_path = "model.engine", DataType dt = DataType::kFLOAT) { IHostMemory* modelStream{ nullptr }; APIToModel(1, &modelStream, dt); //batchsize assert(modelStream != nullptr); std::ofstream p(engine_path, std::ios::binary); if (!p) { std::cerr << "could not open plan output file" << std::endl; } p.write(reinterpret_cast<const char*>(modelStream->data()), modelStream->size()); modelStream->destroy(); return modelStream; } /***************************************** 推理 ***********************************************************/ //加工图片变成拥有batch的输入, tensorrt输入需要的格式,为一个维度 void ProcessImage(std::vector<cv::Mat> InputImage, float input_data[]) { int ImgCount = InputImage.size(); assert(ImgCount == BatchSize); //float input_data[BatchSize * 3 * INPUT_H * INPUT_W]; for (int b = 0; b < ImgCount; b++) { cv::Mat img = InputImage.at(b); int w = img.cols; int h = img.rows; int i = 0; for (int row = 0; row < h; ++row) { uchar* uc_pixel = img.data + row * img.step; for (int col = 0; col < INPUT_W; ++col) { input_data[b * 3 * INPUT_H * INPUT_W + i] = (float)uc_pixel[2] / 255.0; input_data[b * 3 * INPUT_H * INPUT_W + i + INPUT_H * INPUT_W] = (float)uc_pixel[1] / 255.0; input_data[b * 3 * INPUT_H * INPUT_W + i + 2 * INPUT_H * INPUT_W] = (float)uc_pixel[0] / 255.0; uc_pixel += 3; ++i; } } } } //读取engine文件,将其反序列化,构造engine结构,相当于网络初始化 ICudaEngine* inite_engine(std::string engine_path) { char* trtModelStream{ nullptr }; //指针函数,创建保存engine序列化文件结果 size_t size{ 0 }; // read model from the engine file std::ifstream file(engine_path, std::ios::binary); if (file.good()) { file.seekg(0, file.end); size = file.tellg(); file.seekg(0, file.beg); trtModelStream = new char[size]; assert(trtModelStream); file.read(trtModelStream, size); file.close(); } // create a runtime (required for deserialization of model) with NVIDIA's logger IRuntime* runtime = createInferRuntime(gLogger); //反序列化方法 assert(runtime != nullptr); // deserialize engine for using the char-stream ICudaEngine* engine = runtime->deserializeCudaEngine(trtModelStream, size, nullptr); assert(engine != nullptr); /* 一个engine可以有多个execution context,并允许将同一套weights用于多个推理任务。 可以在并行的CUDA streams流中按每个stream流一个engine和一个context来处理图像。 每个context在engine相同的GPU上创建。 */ runtime->destroy(); return engine; }; //engine->createExecutionContext()加载engine后内容,该函数需要根据网络输入/输出略微修改 void doInference(IExecutionContext& context, float* input, float* output, int batchSize) { const ICudaEngine& engine = context.getEngine(); // Pointers to input and output device buffers to pass to engine. // Engine requires exactly IEngine::getNbBindings() number of buffers. assert(engine.getNbBindings() == 2); void* buffers[2]; // In order to bind the buffers, we need to know the names of the input and output tensors. // Note that indices are guaranteed to be less than IEngine::getNbBindings() const int inputIndex = engine.getBindingIndex(INPUT_NAME); const int outputIndex = engine.getBindingIndex(OUTPUT_NAME); // Create GPU buffers on device CHECK(cudaMalloc(&buffers[inputIndex], batchSize * 3 * INPUT_H * INPUT_W * sizeof(float))); //CHECK 核对校验 也可不使用 cudaMalloc(&buffers[outputIndex], batchSize * 2 * INPUT_H * INPUT_W * sizeof(float)); // Create stream cudaStream_t stream; cudaStreamCreate(&stream); // DMA input batch data to device, infer on the batch asynchronously, and DMA output back to host cudaMemcpyAsync(buffers[inputIndex], input, batchSize * 3 * INPUT_H * INPUT_W * sizeof(float), cudaMemcpyHostToDevice, stream); context.enqueue(batchSize, buffers, stream, nullptr);//通常TensorRT的执行是异步的,因此将kernels加入队列放在CUDA stream流上 cudaMemcpyAsync(output, buffers[outputIndex], batchSize * 2 * INPUT_H * INPUT_W * sizeof(float), cudaMemcpyDeviceToHost, stream); cudaStreamSynchronize(stream); // Release stream and buffers cudaStreamDestroy(stream); cudaFree(buffers[inputIndex]); cudaFree(buffers[outputIndex]); } int main() { bool serialize = false; std::string engine_path = "./model.engine"; if (serialize) { //将模型序列化 IHostMemory* modelStream{ nullptr }; modelStream = engine2serialize(); //构建引擎与保存 } else { //加载引擎,预测图片 std::string path = "./2.jpg"; cv::Mat img = cv::imread(path); if (img.empty()) { std::cout << "input images error!" << std::endl; return 0; } cv::Mat imgInput; cv::resize(img, imgInput, cv::Size(INPUT_W, INPUT_H), 0, 0, cv::INTER_LINEAR); vector<cv::Mat> InputImage; InputImage.push_back(imgInput); InputImage.push_back(imgInput); float input[BatchSize * 3 * INPUT_H * INPUT_W]; float output[BatchSize * 2 * INPUT_H * INPUT_W]; ProcessImage(InputImage,input); ICudaEngine* engine = inite_engine(engine_path); IExecutionContext* context = engine->createExecutionContext(); assert(context != nullptr); doInference(*context, input, output, 2); cout << "output_count:" << sizeof(output) / sizeof(output[0]) << endl; cout << "BatchSize:" << BatchSize << "INPUT_H:" << INPUT_H << "INPUT_W:" << INPUT_W << endl; //for (int i = 0; i < BatchSize * 2 * INPUT_H * INPUT_W; i++) { // cout << i << *output << endl; //} } }
结果展示:
以上为本次进一步理解和实现tensorrt的过程,若有问题,欢迎指正。
下次我将使用onnx搭建网络解析。
最后无需复制啥,只需按照以下配置(照猫画虎)即可完成windows10的visual tudio的环境配置:
电脑环境path配置: E:\InstallPackage\TensorRT-8.4.0.6\lib E:\InstallPackage\opencv\build\x64\vc15\bin
说明:engine无需电脑环境配置
包含目录: C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v11.1\include E:\InstallPackage\eigen-3.4.0 E:\InstallPackage\opencv\build\include\opencv2 E:\InstallPackage\opencv\build\include E:\InstallPackage\TensorRT-8.4.0.6\include 库目录: C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v11.1\lib\x64 E:\InstallPackage\opencv\build\x64\vc15\lib E:\InstallPackage\TensorRT-8.4.0.6\lib 链接器-->附加依赖: opencv_world455d.lib nvinfer.lib nvinfer_plugin.lib nvonnxparser.lib nvparsers.lib cuda.lib cudart.lib

 浙公网安备 33010602011771号
浙公网安备 33010602011771号