

D*算法(转)
一、简介
“D*算法”的名称源自 Dynamic A Star,最初由Anthony Stentz于“Optimal and Efficient Path Planning for Partially-Known Environments”中介绍。它是一种启发式的路径搜索算法,适合面对周围环境未知或者周围环境存在动态变化的场景。
二、算法介绍
同A*算法类似,D-star通过一个维护一个优先队列(OpenList)来对场景中的路径节点进行搜索,所不同的是,D*不是由起始点开始搜索,而是以目标点为起始,通过将目标点置于Openlist中来开始搜索,直到机器人当前位置节点由队列中出队为止(当然如果中间某节点状态有动态改变,需要重新寻路,所以才是一个动态寻路算法)。
2.1 符号表示
本部分主要介绍一下论文中用到的一些符号及其含义。
论文中将地图中的路径点用State表示,每一个State包含如下信息:
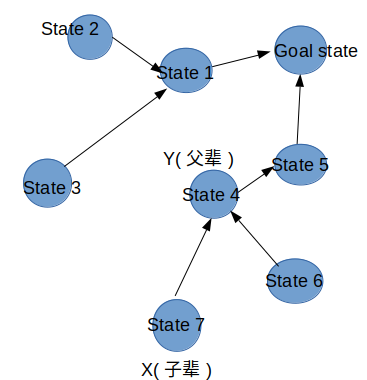
Backpointer: 指向前一个state的指针,指向的state为当前状态的父辈,当前state称为指针指向state的后代,目标state无Backpointer。(路径搜索完毕后,通过机器人所在的state,通过backpointer即可一步步地移动到目标Goal state,GoalState以后用 G表示),b(X)=Y表示X的父辈为Y。类似下面这样,每个指针都是Backpointer:
Tag:表示当前state的状态,有 New、Open、Closed三种状态,
New:该State从未被置于Openlist中,
Open:该State正位于OpenList中,
Closed:已不再位于Openlist中。
H(X):代价函数估计,表示当前State到G的开销估计。
K(X):Key Function,该值是优先队列Openlist中的排序依据,K值最小的State位于队列头 (对于dijsktra而言是以H值作为排序依据),对于处于OpenList上的State X,K(X)表示从X被置于Openlist后,X到G的最小代价H(X),可以简单理解为。K(X)将位于Openlist的State X划分为两种不同的状态,一种状态为Raise(如果K(X)<H(X)),用来传递路径开销的增加(例如某两点之间开销的增加,会导致与之相关的节点到目标的路径开销随之增加);另一种状态为 Lower(如果K(X)<H(X)),用来传递路径开销的减少(例如某两点之间开销的减少,或者某一新的节点被加入到Openlist中,可能导致与之相关的节点到目标的路径开销随之减少)。
kmin:表示所有位于Openlist上的state的最小K值。( K值应该是一个动态变化的值,因为随着地图发生变化,Openlist上保存的是受影响的state)
C(X,Y) :表示X与Y之间的路径开销。
Openlist 是依据K值由小到大进行排序的优先队列。
2.2 算法描述
搜索的关键是state的传递过程,即由G向机器人所在位置进行搜索的过程,这种传递过程是通过不断地从当前OpenList中取出K值最小的State来实现的,每当一个State由Openlist中移出时,它会将开销传递给它的邻居state,这些邻居state会被置于Openlist中,持续进行该循环,直到机器人所在State的状态为 Closed ,或者Openlist为空(表示不存在到G的路径)。
算法最主要的是两个函数, Process-State 和 Modify-Cost ,前者用于计算到目标G的最优路径(也就是dijsktra中的cost值),后者用于改变两个state之间的开销C(X,Y)并将受影响的state置于Openlist中。
(注意Modify-Cost是移动过程中监测到图发生变化后动态调用的)
算法的主要流程:
- 在初始时,所有state的t(Tag)被设置为 New ,H(G)被设置为0。
- G被放置于OpenList,然后Process-State函数被不断执行,直到机器人所处state X由openlist中出队。
- 然后可以通过机器人的当前state按backpointer指向目标G。
- 当移动过程中发现新探测到的障碍时,Modify-Cost函数立刻被调用,来更正C(°)中的路径开销(比如有些点永远到达不了了,那么它的开销就变成无穷大),并将受影响的state重新置于openlist中。
- 令Y表示robot发现障碍时所在的state,通过不断调用Process-State直到 H(Y) ≤ kmin,这时表示路径开销的更改已经传播到了Y,此时,新的路径构建完成。
1~3步其实就是dijsktra算法,

上图中L1-L3表示拥有最低K值的X由openlist中移出,如果X为Lower,那么它的路径代价为最优的。
在L8-L13,X的所有邻接state都被检测是否其路径代价可以更低,状态为New的邻接state被赋予初始路径开销值,并且开销的变动被传播给每一个backpointer指向X的邻接state Y(不管这个新的开销比原开销大或者小),也就是说只要你指向了X,那么X的路径开销变动时,你的路径代价必须随之改变。这里可能存在由于X路径开销变动过大,Y可以通过非X的其他state到达目标且路径开销更小的情况,这点在L8-13中并没有处理,而是放在后续针对Y的process-state函数中,在对Y进行处理时,会将其backpointer指向周围路径开销最小的state。如果X的邻接State状态为New时,应将其邻接state的backpointer指向X。所有路径开销有所变动的state都被置于Openlist中进行处理,从而将变动传播给邻接的state。
上述讨论的时X为Lower状态,接下来讨论X为Raise状态。
如果X为Raise,它的路径开销H可能不是最优的,在L4-L7中,通过其邻居state中已经处于最优开销(即h(Y)≤kold)的节点来优化X的路径开销,如果存在更短的路径,则将X的backpointer指向其neighbor。在L15-L18中,开销变动传播到状态为New的邻居state。如果X可以使一个backpointer并不指向X的邻居state的路径开销最小,即Y通过X到目标G的距离更短,但是此时Y的backpointer并不指向X,针对这种情况,可以将X重新置于Openlist中进而优化Y。在L23-25中,如果X可以通过一个状态为closed的并不是最理想的邻居stateY来减小路径开销,那么将Y重新置于Openlist中。
————————————————
版权声明:本文为CSDN博主「肚皮朝上的刺猬」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/a380331382/article/details/82841071

