学习笔记-CCS-MSP430F5529[快速入门篇二]
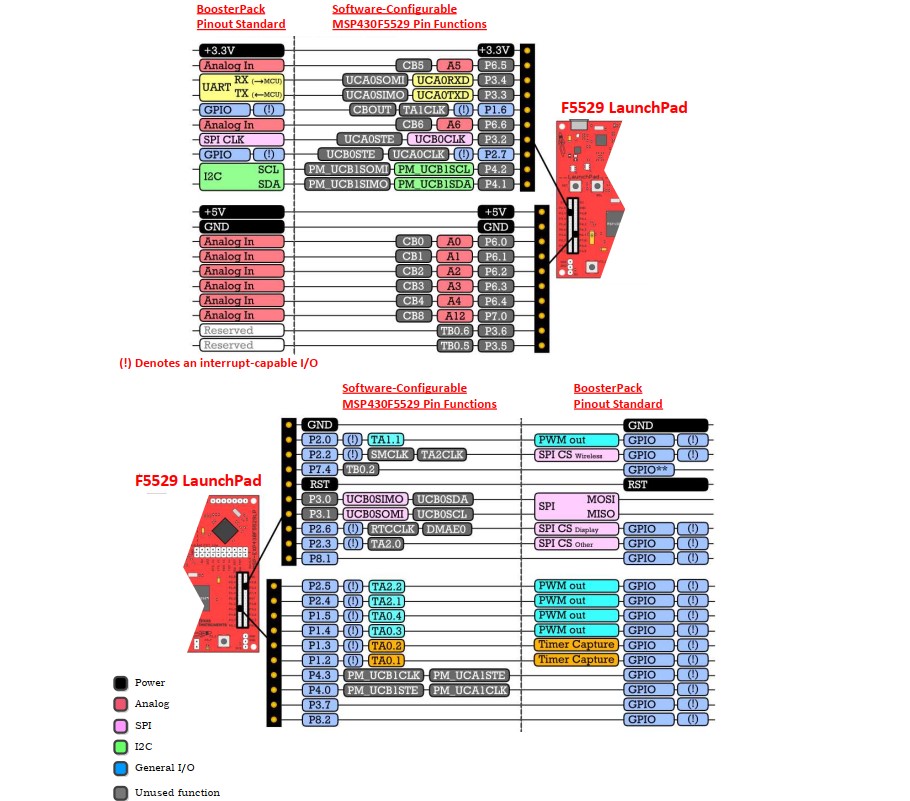
由于2021的全国电赛延期了,从今天开始打算好好整理一下使用CCS编程的经验,本篇笔记会好好整理一下我备赛期间用CCS写的程序,包括外部中断,定时器部分的定时中断,定时器输入捕获,PWM波输出,UART,OLED(IIC),MPU6050,内容涵盖了硬件和软件部分。鉴于笔者水平有限和能力不足,文中有不到之处还请看者多包涵,我的工程源代码链接会在文章末尾贴出。先贴一张peripheral图,MSP430的外部引脚及其复用功能都可在图里查到。
一·外部中断
外部中断的操作方式与GPIO一样是使用寄存器操作,所以学习相关的寄存器是不可避免的,不过MSP430的寄存器不算太多,操作外部中断主要要用到以下寄存器:
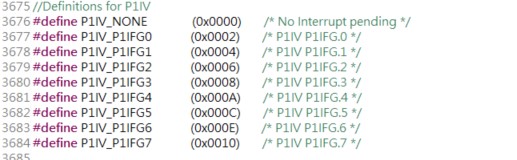
1.PxIV 中断向量表(字),P1端口的中断函数入口地址应该都放在里面,只是一个地址;
2.PxIE 中断使能寄存器,相应引脚位置1表示允许产生中断;置0表示该引脚不产生中断;
3.PxIES 中断触发方式选择寄存器,相应引脚位置1表示下降沿触发,置0表示上升沿触发;
4.PxIFG 中断标志,由于MSP430的中断使能需要使能总中断,所以仅当总中断GIE和中断使能寄存器PxIE都打开后,PxIFG高电平表示有中断请求等待待响应,等中断服务函数结束时需要软件清该标志位;
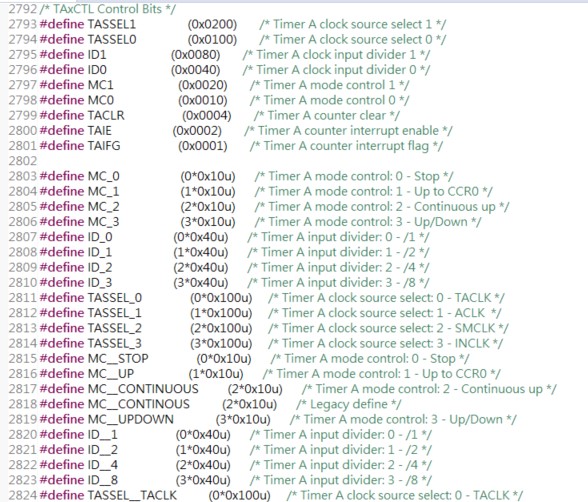
这些寄存器在TI的msp430f5xx_6xxgeneric.h头文件有如下定义


下面看一个外部中断程序,所用引脚为P2.1,对应MSP430F5529火箭板的板载按键S1,初始化为下降沿触发
void EXTI_Init()
{
/*按键中断*/
P2IE |= BIT1; //P2.1中断使能
P2IES |= BIT1; //设置为下降沿触
P2IFG &= ~BIT1; //清中断标志位
P2REN |= BIT1; //上拉电阻
P2OUT |= BIT1; //初始化置高
}
/*中断服务函数*/
#pragma vector=PORT2_VECTOR
__interrupt void P2_ISR(void)
{
if(P2IFG & BIT1)
{
delay(2); //延时2ms消抖动
/*这里是函数算法部分*/
}
P2IFG &=~BIT1; //清空中断标志
}二·定时器
MSP430的定时器资源还算丰富,共有两类共四个定时器,分别是3个TimerA和1TimerB,由于我对TimerA使用较多,所以本文着重来讲TimerA,三个TimerA分别为Timer0_A(5个捕获/比较寄存器),Timer1_A(3个捕获/比较寄存器),Timer2_A(3个捕获/比较寄存器),下面是TimerA的结构图
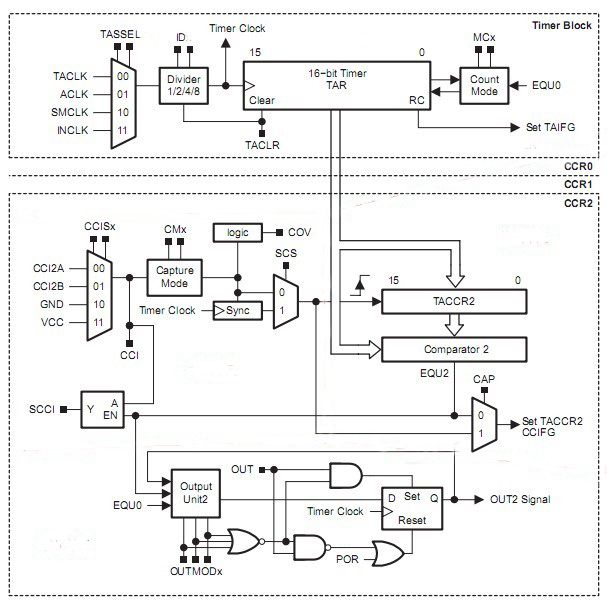
我们结合TimerA的寄存器讲解一下这张图
上半部分是整个定时器的基础,整个上半部分可通过TACTL控制寄存器来编程,从功能角度来讲从左往右分别是,自身时钟源配置TASSEL,第一次分频选择ID,定时器清零位TACLR,计数值存放寄存器TAR,工作模式控制位MC,中断标志位TAIFG以及没有在结构图出现的定时器中断使能TAIE。

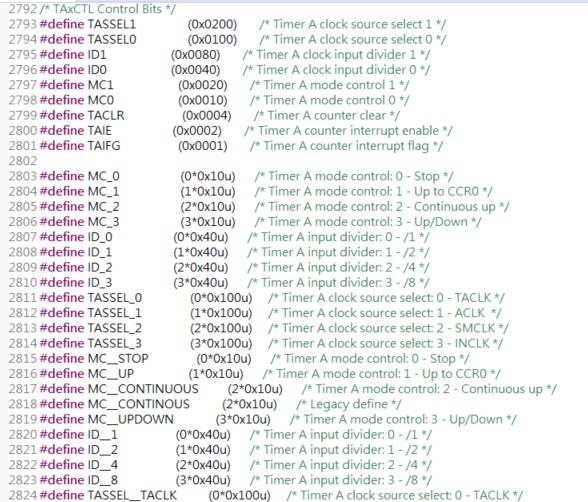
上图为TACTL寄存器各个位的功能,TACTL是一个16bit寄存器,是TA类定时器的控制寄存器,在程序中对定时器进行初始化会经常用到,我会简略的说一下各个寄存器的功能和可选的模式有哪些,具体详细作用还请参考官方手册。
TASSEL 通过更改TASSEL所在位可选4个时钟任一作为当前计数器的时钟源,其中常用的是TASSEL_1 ACLK(32768Hz)以及TASSEL_2 SMCLK(1.045MHz);
IDx 分频可选1,2,4,8分频;
TACLR 定时器清零位,置位会复位寄存器;
TAIE 定时器中断使能,置1后允许中断,同样的使能中断还是需要开启总中断GIE;
TAIFG 中断标志位,该位为1表示有中断发生
定时器的基础配置通过TACTL寄存器就可以完成,但其工作模式还得依靠另一个寄存器TAxCCRx
接下来我们来看定时器的下半部分即捕获/比较控制寄存器TACCTL

TACCTL寄存器也是16bit的寄存器,是定时器实现各种捕获功能的重要寄存器,这个寄存器我们按位来理解它的用法,下面只贴出了我认为比较常用和重要的位的作用,
CMx 捕获模式设定 CM_1上升沿捕获,CM_2下降沿捕获,CM_3上升和下降沿捕获;
CCISx 捕获源选择,00为外部引脚作为捕获源,01为内部信号,配合CMx可做外部编码器输入捕获;
SCS 同步捕获源,是否与时钟同步捕获,为默认值就可;
CAP 0-比较模式,1-捕获模式;
OUTMOD 输出模式控制位,其中MOD2和MOD7可用作PWM波输出;
CCIE 中断允许,这个位是用来允许相应的通道产生中断的,并允许相应标志位CCIFG产生中断请求;
CCIFG 捕获/比较中断标志位,为1表示有中断挂起,定时器中断不需要软件清标志位
到这里定时器的初始化和功能配置已经介绍完毕,就差定时器计数溢出产生中断,而这个中断向量的入口地址存在中断向量字TAIV里,总的来说,通过配置TAxCTL和TACCTLx寄存器就可以完成MSP430的A类定时器的大部分功能,下面举PWM输出例子和定时中断例子
PWM输出
TA(A类定时器)的每个捕获/比较器都有一个输出口,这个输出口可以在定时器工作在特定输出模式时输出不同的信号,当定时器工作在OUTMOD2或者OUTMOD7时,输出口可输出PWM波,下面介绍一下MOD2和MOD7
MOD2 : 翻转/复位输出模式,当定时器计数到TACCRx值时,输出翻转,当定时器技术到TACCR0时,输出复位,显然CCR0寄存器内存放的值和当前的PWM周期有关,CCRx存放的值额占空比有关,通过更改CCR0与CCRx的值,便可实现频率和占空比可调节的方波输出。
MOD7 : 复位/置位输出模式,当定时器计数到TACCRx值时,输出复位,当定时器计数到TACCR0值时,输出置位,这个与MOD2的区别更像是STM32里PWM1模式与PWM2模式的区别一样,占空比和频率仍然是通过修改CCR0与CCRx的值来实现的。
/*电机PWM初始化,周期2KHz*/
void MOTOR_PWM_Init(void)
{
P1DIR |= BIT6;
P1SEL |= BIT6;
P2DIR |=BIT0; // 设置 P2.0为输出
P2SEL |=BIT0; // 设置 P2.0为TA1.1输出
TA1CTL= TASSEL_2 +MC_1; // 设置TIMERA的时钟源为SMCLK, 计数模式为up,到CCR0再自动从0开始计数
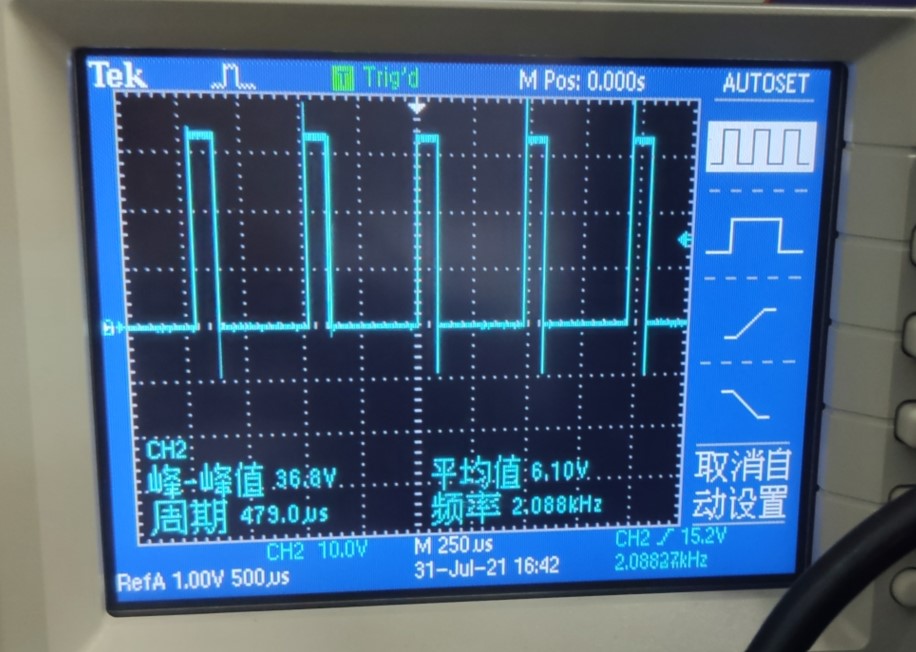
TA1CCR0 = 500; // 设置PWM 周期 ,由于时钟源选择的SMCLK为1.045MHz,周期 T = 1.045M/20000 = 50 Hz
TA1CCTL1 = OUTMOD_7; // 设置PWM 输出模式为:7 - PWM复位/置位模式
TA1CCR1=100; //CCR1/CCR0即为占空比
}用示波器可在TA1.1检测到下面的波形
定时中断
在比较模式下,开启捕获/比较器的中断后,CCRx每计数到设定值后,就会产生一次中断,利用这一性质可实现定时器精准定时中断。下面是一个1s的定时中断
/*定时器中断初始化*/
void SYSTICK_Init(int time)
{
P2DIR|=BIT2;
P2SEL |=BIT2;
TA2CCR0=32768; //置入要比较的数值,实现1s一次中断
TA2CCTL0=CCIE; //捕获比较器1开启 CCIFG 位中断
TA2CTL|=TASSEL_1+MC_1+TACLR;//选择 SCLK32.768KHZ 作为时钟
}
/*定时器中断服务函数,该函数1s执行一次*/
#pragma vector=TIMER2_A0_VECTOR
__interrupt void TIMER2_A0_ISR(void)
{
__enable_interrupt(); //在中断中开启总中断,代表允许中断嵌套
}三·UART
---------------------------------------------等待后续更新(应该明天会更)---------------------------------------
---------------------------------------------更新于2021-08-05-15:21:23---------------------------------------
MSP430的串口通信由USCI(通用串行通讯接口)管理,其中USCI_A0与USCI_A1都可实现异步UART,这里直接给出初始化函数和发送函数,需要知道的是在该例程中,串口的波特率是9600,串口的波特率由选择的时钟频率和分频共同决定,此次初始化使用的是板载UART1,在火箭板上接上RXD和TXD的跳线帽后,连接上MricoUSB就可以在电脑上的串口监视器查看到单片机发送的数据
void USART0_Config(void)
{
/*串口初始化*/
P3SEL |= BIT3+BIT4 ; // 开启P3.3和P3.4的的端口复用
UCA0CTL1 |= UCSWRST;
UCA0CTL1 |= UCSSEL_1; // 时钟源选择为ACLK 32768Hz ,也可选SMCLK
UCA0BR0 = 0x03; // 低八位
UCA0BR1 = 0x00; // 波特率由该公式决定:32768(ACLK)/(3(UCA0BR0)+3(UCA0BR1)/8)=9709
UCA0MCTL |= UCBRS_3 + UCBRF_0; //
UCA0CTL1 &= ~UCSWRST;
UCA0IE |= UCRXIE; // Enable USCI_A1 RX interrupt 使能中断
}
/*UART1发送字符串函数*/
void send1_buf(unsigned char *ptr)
{
while(*ptr != '\0')
{
while(!(UCA1IFG & UCTXIFG));
UCA1TXBUF = *ptr;
ptr++;
delay(10);
}
}四·OLED
0.96寸的OLED屏幕相信大家都不陌生,我使用的是I2C通讯协议的OLED屏幕,虽然MSP430是板载了I2C通讯接口的,不过我使用的还是软件I2C,直接从STM32那边移植过来的,通过对GPIO引脚输出特定时序来软件模拟I2C通讯协议的写和读操作,我的屏幕SCL连接在P6.3,SDA连接在P6.4,没啥好说的,直接上源码,大家移植的时候只需要更改oled.h里SCL和SDA的置位和清位就可以了。
关于显示屏幕的显示函数,其中void OLED_ShowString(u8 x,u8 y, u8 *p,u8 Char_Size)是显示ASCII字符串函数,四个形参分别为 x坐标,y坐标,"显示的字符",字体大小有8和16可选,其他大小需要自己去字模软件去取模,显示汉字的函数没有移植过来,大家去野火论坛下载STM32的oled工程,把里面的显示汉字函数拷过来然后将取模软件的汉字取模数据存放在char Hzk[][32]就可以了。
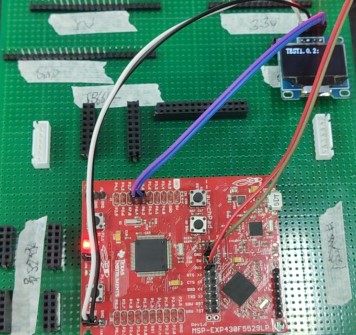
连线和现象如下
#include <oled.h>
void main (void)
{
WDT_A_hold(WDT_A_BASE);
OLED_Init(); //oled初始化
OLED_Clear(); //oled清屏
__enable_interrupt(); //开启全局中断
OLED_ShowString(0,0,"TEST1.0.2:",16); //四个形参分别为 x坐标,y坐标,"显示的字符",字体大小8/16
while(1)
{
}
}/*oled.h文件*/
#ifndef OLED_H_
#define OLED_H_
#include <sys.h>
#define OLED_MODE 0
#define SIZE 8
#define XLevelL 0x00
#define XLevelH 0x10
#define Max_Column 128
#define Max_Row 64
#define Brightness 0xFF
#define X_WIDTH 128
#define Y_WIDTH 64
#define OLED_SCLK_Clr() P6OUT&=~BIT3 //CLK
#define OLED_SCLK_Set() P6OUT|=BIT3
#define OLED_SDIN_Clr() P6OUT&=~BIT4 //DIN
#define OLED_SDIN_Set() P6OUT|=BIT4
#define OLED_CMD 0
#define OLED_DATA 1
// Functions to control OLED are as follows
void OLED_WR_Byte(unsigned dat,unsigned cmd);
void OLED_Display_On(void);
void OLED_Display_Off(void);
void OLED_Init(void);
void OLED_Clear(void);
void OLED_DrawPoint(u8 x,u8 y,u8 t);
void OLED_Fill(u8 x1,u8 y1,u8 x2,u8 y2,u8 dot);
void OLED_ShowChar(u8 x,u8 y,u8 chr,u8 Char_Size);
void OLED_ShowNum(u8 x,u8 y,u32 num,u8 len,u8 size);
void OLED_ShowVI(u8 x,u8 y,u32 num,u8 size);
void OLED_ShowString(u8 x,u8 y, u8 *p,u8 Char_Size);
void OLED_Set_Pos(unsigned char x, unsigned char y);
void Delay_1ms(unsigned int Del_1ms);
void fill_picture(unsigned char fill_Data);
void Picture();
void IIC_Start();
void IIC_Stop();
void Write_IIC_Command(unsigned char IIC_Command);
void Write_IIC_Data(unsigned char IIC_Data);
void Write_IIC_Byte(unsigned char IIC_Byte);
void IIC_Wait_Ack();
#endif /* OLED_H_ *//*oled.c文件*/
// the storage format is as follow
//[0]0 1 2 3 ... 127
//[1]0 1 2 3 ... 127
//[2]0 1 2 3 ... 127
//[3]0 1 2 3 ... 127
//[4]0 1 2 3 ... 127
//[5]0 1 2 3 ... 127
//[6]0 1 2 3 ... 127
//[7]0 1 2 3 ... 127
/**********************************************
//IIC Start
**********************************************/
#include<sys.h>
const unsigned char F6x8[][6] =
{
0x00, 0x00, 0x00, 0x00, 0x00, 0x00,// sp
0x00, 0x00, 0x00, 0x2f, 0x00, 0x00,// !
0x00, 0x00, 0x07, 0x00, 0x07, 0x00,// "
0x00, 0x14, 0x7f, 0x14, 0x7f, 0x14,// #
0x00, 0x24, 0x2a, 0x7f, 0x2a, 0x12,// $
0x00, 0x62, 0x64, 0x08, 0x13, 0x23,// %
0x00, 0x36, 0x49, 0x55, 0x22, 0x50,// &
0x00, 0x00, 0x05, 0x03, 0x00, 0x00,// '
0x00, 0x00, 0x1c, 0x22, 0x41, 0x00,// (
0x00, 0x00, 0x41, 0x22, 0x1c, 0x00,// )
0x00, 0x14, 0x08, 0x3E, 0x08, 0x14,// *
0x00, 0x08, 0x08, 0x3E, 0x08, 0x08,// +
0x00, 0x00, 0x00, 0xA0, 0x60, 0x00,// ,
0x00, 0x08, 0x08, 0x08, 0x08, 0x08,// -
0x00, 0x00, 0x60, 0x60, 0x00, 0x00,// .
0x00, 0x20, 0x10, 0x08, 0x04, 0x02,// /
0x00, 0x3E, 0x51, 0x49, 0x45, 0x3E,// 0
0x00, 0x00, 0x42, 0x7F, 0x40, 0x00,// 1
0x00, 0x42, 0x61, 0x51, 0x49, 0x46,// 2
0x00, 0x21, 0x41, 0x45, 0x4B, 0x31,// 3
0x00, 0x18, 0x14, 0x12, 0x7F, 0x10,// 4
0x00, 0x27, 0x45, 0x45, 0x45, 0x39,// 5
0x00, 0x3C, 0x4A, 0x49, 0x49, 0x30,// 6
0x00, 0x01, 0x71, 0x09, 0x05, 0x03,// 7
0x00, 0x36, 0x49, 0x49, 0x49, 0x36,// 8
0x00, 0x06, 0x49, 0x49, 0x29, 0x1E,// 9
0x00, 0x00, 0x36, 0x36, 0x00, 0x00,// :
0x00, 0x00, 0x56, 0x36, 0x00, 0x00,// ;
0x00, 0x08, 0x14, 0x22, 0x41, 0x00,// <
0x00, 0x14, 0x14, 0x14, 0x14, 0x14,// =
0x00, 0x00, 0x41, 0x22, 0x14, 0x08,// >
0x00, 0x02, 0x01, 0x51, 0x09, 0x06,// ?
0x00, 0x32, 0x49, 0x59, 0x51, 0x3E,// @
0x00, 0x7C, 0x12, 0x11, 0x12, 0x7C,// A
0x00, 0x7F, 0x49, 0x49, 0x49, 0x36,// B
0x00, 0x3E, 0x41, 0x41, 0x41, 0x22,// C
0x00, 0x7F, 0x41, 0x41, 0x22, 0x1C,// D
0x00, 0x7F, 0x49, 0x49, 0x49, 0x41,// E
0x00, 0x7F, 0x09, 0x09, 0x09, 0x01,// F
0x00, 0x3E, 0x41, 0x49, 0x49, 0x7A,// G
0x00, 0x7F, 0x08, 0x08, 0x08, 0x7F,// H
0x00, 0x00, 0x41, 0x7F, 0x41, 0x00,// I
0x00, 0x20, 0x40, 0x41, 0x3F, 0x01,// J
0x00, 0x7F, 0x08, 0x14, 0x22, 0x41,// K
0x00, 0x7F, 0x40, 0x40, 0x40, 0x40,// L
0x00, 0x7F, 0x02, 0x0C, 0x02, 0x7F,// M
0x00, 0x7F, 0x04, 0x08, 0x10, 0x7F,// N
0x00, 0x3E, 0x41, 0x41, 0x41, 0x3E,// O
0x00, 0x7F, 0x09, 0x09, 0x09, 0x06,// P
0x00, 0x3E, 0x41, 0x51, 0x21, 0x5E,// Q
0x00, 0x7F, 0x09, 0x19, 0x29, 0x46,// R
0x00, 0x46, 0x49, 0x49, 0x49, 0x31,// S
0x00, 0x01, 0x01, 0x7F, 0x01, 0x01,// T
0x00, 0x3F, 0x40, 0x40, 0x40, 0x3F,// U
0x00, 0x1F, 0x20, 0x40, 0x20, 0x1F,// V
0x00, 0x3F, 0x40, 0x38, 0x40, 0x3F,// W
0x00, 0x63, 0x14, 0x08, 0x14, 0x63,// X
0x00, 0x07, 0x08, 0x70, 0x08, 0x07,// Y
0x00, 0x61, 0x51, 0x49, 0x45, 0x43,// Z
0x00, 0x00, 0x7F, 0x41, 0x41, 0x00,// [
0x00, 0x55, 0x2A, 0x55, 0x2A, 0x55,// 55
0x00, 0x00, 0x41, 0x41, 0x7F, 0x00,// ]
0x00, 0x04, 0x02, 0x01, 0x02, 0x04,// ^
0x00, 0x40, 0x40, 0x40, 0x40, 0x40,// _
0x00, 0x00, 0x01, 0x02, 0x04, 0x00,// '
0x00, 0x20, 0x54, 0x54, 0x54, 0x78,// a
0x00, 0x7F, 0x48, 0x44, 0x44, 0x38,// b
0x00, 0x38, 0x44, 0x44, 0x44, 0x20,// c
0x00, 0x38, 0x44, 0x44, 0x48, 0x7F,// d
0x00, 0x38, 0x54, 0x54, 0x54, 0x18,// e
0x00, 0x08, 0x7E, 0x09, 0x01, 0x02,// f
0x00, 0x18, 0xA4, 0xA4, 0xA4, 0x7C,// g
0x00, 0x7F, 0x08, 0x04, 0x04, 0x78,// h
0x00, 0x00, 0x44, 0x7D, 0x40, 0x00,// i
0x00, 0x40, 0x80, 0x84, 0x7D, 0x00,// j
0x00, 0x7F, 0x10, 0x28, 0x44, 0x00,// k
0x00, 0x00, 0x41, 0x7F, 0x40, 0x00,// l
0x00, 0x7C, 0x04, 0x18, 0x04, 0x78,// m
0x00, 0x7C, 0x08, 0x04, 0x04, 0x78,// n
0x00, 0x38, 0x44, 0x44, 0x44, 0x38,// o
0x00, 0xFC, 0x24, 0x24, 0x24, 0x18,// p
0x00, 0x18, 0x24, 0x24, 0x18, 0xFC,// q
0x00, 0x7C, 0x08, 0x04, 0x04, 0x08,// r
0x00, 0x48, 0x54, 0x54, 0x54, 0x20,// s
0x00, 0x04, 0x3F, 0x44, 0x40, 0x20,// t
0x00, 0x3C, 0x40, 0x40, 0x20, 0x7C,// u
0x00, 0x1C, 0x20, 0x40, 0x20, 0x1C,// v
0x00, 0x3C, 0x40, 0x30, 0x40, 0x3C,// w
0x00, 0x44, 0x28, 0x10, 0x28, 0x44,// x
0x00, 0x1C, 0xA0, 0xA0, 0xA0, 0x7C,// y
0x00, 0x44, 0x64, 0x54, 0x4C, 0x44,// z
0x14, 0x14, 0x14, 0x14, 0x14, 0x14,// horiz lines
};
/****************************************8*16 dot matrix************************************/
const unsigned char F8X16[]=
{
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,// 0
0x00,0x00,0x00,0xF8,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x33,0x30,0x00,0x00,0x00,//! 1
0x00,0x10,0x0C,0x06,0x10,0x0C,0x06,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//" 2
0x40,0xC0,0x78,0x40,0xC0,0x78,0x40,0x00,0x04,0x3F,0x04,0x04,0x3F,0x04,0x04,0x00,//# 3
0x00,0x70,0x88,0xFC,0x08,0x30,0x00,0x00,0x00,0x18,0x20,0xFF,0x21,0x1E,0x00,0x00,//$ 4
0xF0,0x08,0xF0,0x00,0xE0,0x18,0x00,0x00,0x00,0x21,0x1C,0x03,0x1E,0x21,0x1E,0x00,//% 5
0x00,0xF0,0x08,0x88,0x70,0x00,0x00,0x00,0x1E,0x21,0x23,0x24,0x19,0x27,0x21,0x10,//& 6
0x10,0x16,0x0E,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//' 7
0x00,0x00,0x00,0xE0,0x18,0x04,0x02,0x00,0x00,0x00,0x00,0x07,0x18,0x20,0x40,0x00,//( 8
0x00,0x02,0x04,0x18,0xE0,0x00,0x00,0x00,0x00,0x40,0x20,0x18,0x07,0x00,0x00,0x00,//) 9
0x40,0x40,0x80,0xF0,0x80,0x40,0x40,0x00,0x02,0x02,0x01,0x0F,0x01,0x02,0x02,0x00,//* 10
0x00,0x00,0x00,0xF0,0x00,0x00,0x00,0x00,0x01,0x01,0x01,0x1F,0x01,0x01,0x01,0x00,//+ 11
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0xB0,0x70,0x00,0x00,0x00,0x00,0x00,//, 12
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x01,0x01,0x01,0x01,0x01,0x01,0x01,//- 13
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x30,0x30,0x00,0x00,0x00,0x00,0x00,//. 14
0x00,0x00,0x00,0x00,0x80,0x60,0x18,0x04,0x00,0x60,0x18,0x06,0x01,0x00,0x00,0x00,/// 15
0x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,0x00,0x0F,0x10,0x20,0x20,0x10,0x0F,0x00,//0 16
0x00,0x10,0x10,0xF8,0x00,0x00,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//1 17
0x00,0x70,0x08,0x08,0x08,0x88,0x70,0x00,0x00,0x30,0x28,0x24,0x22,0x21,0x30,0x00,//2 18
0x00,0x30,0x08,0x88,0x88,0x48,0x30,0x00,0x00,0x18,0x20,0x20,0x20,0x11,0x0E,0x00,//3 19
0x00,0x00,0xC0,0x20,0x10,0xF8,0x00,0x00,0x00,0x07,0x04,0x24,0x24,0x3F,0x24,0x00,//4 20
0x00,0xF8,0x08,0x88,0x88,0x08,0x08,0x00,0x00,0x19,0x21,0x20,0x20,0x11,0x0E,0x00,//5 21
0x00,0xE0,0x10,0x88,0x88,0x18,0x00,0x00,0x00,0x0F,0x11,0x20,0x20,0x11,0x0E,0x00,//6 22
0x00,0x38,0x08,0x08,0xC8,0x38,0x08,0x00,0x00,0x00,0x00,0x3F,0x00,0x00,0x00,0x00,//7 23
0x00,0x70,0x88,0x08,0x08,0x88,0x70,0x00,0x00,0x1C,0x22,0x21,0x21,0x22,0x1C,0x00,//8 24
0x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,0x00,0x00,0x31,0x22,0x22,0x11,0x0F,0x00,//9 25
0x00,0x00,0x00,0xC0,0xC0,0x00,0x00,0x00,0x00,0x00,0x00,0x30,0x30,0x00,0x00,0x00,//: 26
0x00,0x00,0x00,0x80,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0x60,0x00,0x00,0x00,0x00,//; 27
0x00,0x00,0x80,0x40,0x20,0x10,0x08,0x00,0x00,0x01,0x02,0x04,0x08,0x10,0x20,0x00,//< 28
0x40,0x40,0x40,0x40,0x40,0x40,0x40,0x00,0x04,0x04,0x04,0x04,0x04,0x04,0x04,0x00,//= 29
0x00,0x08,0x10,0x20,0x40,0x80,0x00,0x00,0x00,0x20,0x10,0x08,0x04,0x02,0x01,0x00,//> 30
0x00,0x70,0x48,0x08,0x08,0x08,0xF0,0x00,0x00,0x00,0x00,0x30,0x36,0x01,0x00,0x00,//? 31
0xC0,0x30,0xC8,0x28,0xE8,0x10,0xE0,0x00,0x07,0x18,0x27,0x24,0x23,0x14,0x0B,0x00,//@ 32
0x00,0x00,0xC0,0x38,0xE0,0x00,0x00,0x00,0x20,0x3C,0x23,0x02,0x02,0x27,0x38,0x20,//A 33
0x08,0xF8,0x88,0x88,0x88,0x70,0x00,0x00,0x20,0x3F,0x20,0x20,0x20,0x11,0x0E,0x00,//B 34
0xC0,0x30,0x08,0x08,0x08,0x08,0x38,0x00,0x07,0x18,0x20,0x20,0x20,0x10,0x08,0x00,//C 35
0x08,0xF8,0x08,0x08,0x08,0x10,0xE0,0x00,0x20,0x3F,0x20,0x20,0x20,0x10,0x0F,0x00,//D 36
0x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,0x20,0x3F,0x20,0x20,0x23,0x20,0x18,0x00,//E 37
0x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,0x20,0x3F,0x20,0x00,0x03,0x00,0x00,0x00,//F 38
0xC0,0x30,0x08,0x08,0x08,0x38,0x00,0x00,0x07,0x18,0x20,0x20,0x22,0x1E,0x02,0x00,//G 39
0x08,0xF8,0x08,0x00,0x00,0x08,0xF8,0x08,0x20,0x3F,0x21,0x01,0x01,0x21,0x3F,0x20,//H 40
0x00,0x08,0x08,0xF8,0x08,0x08,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//I 41
0x00,0x00,0x08,0x08,0xF8,0x08,0x08,0x00,0xC0,0x80,0x80,0x80,0x7F,0x00,0x00,0x00,//J 42
0x08,0xF8,0x88,0xC0,0x28,0x18,0x08,0x00,0x20,0x3F,0x20,0x01,0x26,0x38,0x20,0x00,//K 43
0x08,0xF8,0x08,0x00,0x00,0x00,0x00,0x00,0x20,0x3F,0x20,0x20,0x20,0x20,0x30,0x00,//L 44
0x08,0xF8,0xF8,0x00,0xF8,0xF8,0x08,0x00,0x20,0x3F,0x00,0x3F,0x00,0x3F,0x20,0x00,//M 45
0x08,0xF8,0x30,0xC0,0x00,0x08,0xF8,0x08,0x20,0x3F,0x20,0x00,0x07,0x18,0x3F,0x00,//N 46
0xE0,0x10,0x08,0x08,0x08,0x10,0xE0,0x00,0x0F,0x10,0x20,0x20,0x20,0x10,0x0F,0x00,//O 47
0x08,0xF8,0x08,0x08,0x08,0x08,0xF0,0x00,0x20,0x3F,0x21,0x01,0x01,0x01,0x00,0x00,//P 48
0xE0,0x10,0x08,0x08,0x08,0x10,0xE0,0x00,0x0F,0x18,0x24,0x24,0x38,0x50,0x4F,0x00,//Q 49
0x08,0xF8,0x88,0x88,0x88,0x88,0x70,0x00,0x20,0x3F,0x20,0x00,0x03,0x0C,0x30,0x20,//R 50
0x00,0x70,0x88,0x08,0x08,0x08,0x38,0x00,0x00,0x38,0x20,0x21,0x21,0x22,0x1C,0x00,//S 51
0x18,0x08,0x08,0xF8,0x08,0x08,0x18,0x00,0x00,0x00,0x20,0x3F,0x20,0x00,0x00,0x00,//T 52
0x08,0xF8,0x08,0x00,0x00,0x08,0xF8,0x08,0x00,0x1F,0x20,0x20,0x20,0x20,0x1F,0x00,//U 53
0x08,0x78,0x88,0x00,0x00,0xC8,0x38,0x08,0x00,0x00,0x07,0x38,0x0E,0x01,0x00,0x00,//V 54
0xF8,0x08,0x00,0xF8,0x00,0x08,0xF8,0x00,0x03,0x3C,0x07,0x00,0x07,0x3C,0x03,0x00,//W 55
0x08,0x18,0x68,0x80,0x80,0x68,0x18,0x08,0x20,0x30,0x2C,0x03,0x03,0x2C,0x30,0x20,//X 56
0x08,0x38,0xC8,0x00,0xC8,0x38,0x08,0x00,0x00,0x00,0x20,0x3F,0x20,0x00,0x00,0x00,//Y 57
0x10,0x08,0x08,0x08,0xC8,0x38,0x08,0x00,0x20,0x38,0x26,0x21,0x20,0x20,0x18,0x00,//Z 58
0x00,0x00,0x00,0xFE,0x02,0x02,0x02,0x00,0x00,0x00,0x00,0x7F,0x40,0x40,0x40,0x00,//[ 59
0x00,0x0C,0x30,0xC0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x01,0x06,0x38,0xC0,0x00,//\ 60
0x00,0x02,0x02,0x02,0xFE,0x00,0x00,0x00,0x00,0x40,0x40,0x40,0x7F,0x00,0x00,0x00,//] 61
0x00,0x00,0x04,0x02,0x02,0x02,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//^ 62
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x80,//_ 63
0x00,0x02,0x02,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//` 64
0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x00,0x19,0x24,0x22,0x22,0x22,0x3F,0x20,//a 65
0x08,0xF8,0x00,0x80,0x80,0x00,0x00,0x00,0x00,0x3F,0x11,0x20,0x20,0x11,0x0E,0x00,//b 66
0x00,0x00,0x00,0x80,0x80,0x80,0x00,0x00,0x00,0x0E,0x11,0x20,0x20,0x20,0x11,0x00,//c 67
0x00,0x00,0x00,0x80,0x80,0x88,0xF8,0x00,0x00,0x0E,0x11,0x20,0x20,0x10,0x3F,0x20,//d 68
0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x00,0x1F,0x22,0x22,0x22,0x22,0x13,0x00,//e 69
0x00,0x80,0x80,0xF0,0x88,0x88,0x88,0x18,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//f 70
0x00,0x00,0x80,0x80,0x80,0x80,0x80,0x00,0x00,0x6B,0x94,0x94,0x94,0x93,0x60,0x00,//g 71
0x08,0xF8,0x00,0x80,0x80,0x80,0x00,0x00,0x20,0x3F,0x21,0x00,0x00,0x20,0x3F,0x20,//h 72
0x00,0x80,0x98,0x98,0x00,0x00,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//i 73
0x00,0x00,0x00,0x80,0x98,0x98,0x00,0x00,0x00,0xC0,0x80,0x80,0x80,0x7F,0x00,0x00,//j 74
0x08,0xF8,0x00,0x00,0x80,0x80,0x80,0x00,0x20,0x3F,0x24,0x02,0x2D,0x30,0x20,0x00,//k 75
0x00,0x08,0x08,0xF8,0x00,0x00,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//l 76
0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x00,0x20,0x3F,0x20,0x00,0x3F,0x20,0x00,0x3F,//m 77
0x80,0x80,0x00,0x80,0x80,0x80,0x00,0x00,0x20,0x3F,0x21,0x00,0x00,0x20,0x3F,0x20,//n 78
0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x00,0x1F,0x20,0x20,0x20,0x20,0x1F,0x00,//o 79
0x80,0x80,0x00,0x80,0x80,0x00,0x00,0x00,0x80,0xFF,0xA1,0x20,0x20,0x11,0x0E,0x00,//p 80
0x00,0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x0E,0x11,0x20,0x20,0xA0,0xFF,0x80,//q 81
0x80,0x80,0x80,0x00,0x80,0x80,0x80,0x00,0x20,0x20,0x3F,0x21,0x20,0x00,0x01,0x00,//r 82
0x00,0x00,0x80,0x80,0x80,0x80,0x80,0x00,0x00,0x33,0x24,0x24,0x24,0x24,0x19,0x00,//s 83
0x00,0x80,0x80,0xE0,0x80,0x80,0x00,0x00,0x00,0x00,0x00,0x1F,0x20,0x20,0x00,0x00,//t 84
0x80,0x80,0x00,0x00,0x00,0x80,0x80,0x00,0x00,0x1F,0x20,0x20,0x20,0x10,0x3F,0x20,//u 85
0x80,0x80,0x80,0x00,0x00,0x80,0x80,0x80,0x00,0x01,0x0E,0x30,0x08,0x06,0x01,0x00,//v 86
0x80,0x80,0x00,0x80,0x00,0x80,0x80,0x80,0x0F,0x30,0x0C,0x03,0x0C,0x30,0x0F,0x00,//w 87
0x00,0x80,0x80,0x00,0x80,0x80,0x80,0x00,0x00,0x20,0x31,0x2E,0x0E,0x31,0x20,0x00,//x 88
0x80,0x80,0x80,0x00,0x00,0x80,0x80,0x80,0x80,0x81,0x8E,0x70,0x18,0x06,0x01,0x00,//y 89
0x00,0x80,0x80,0x80,0x80,0x80,0x80,0x00,0x00,0x21,0x30,0x2C,0x22,0x21,0x30,0x00,//z 90
0x00,0x00,0x00,0x00,0x80,0x7C,0x02,0x02,0x00,0x00,0x00,0x00,0x00,0x3F,0x40,0x40,//{ 91
0x00,0x00,0x00,0x00,0xFF,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xFF,0x00,0x00,0x00,//| 92
0x00,0x02,0x02,0x7C,0x80,0x00,0x00,0x00,0x00,0x40,0x40,0x3F,0x00,0x00,0x00,0x00,//} 93
0x00,0x06,0x01,0x01,0x02,0x02,0x04,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//~ 94
};
char Hzk[][32]={
{0x00,0x00,0xF0,0x10,0x10,0x10,0x10,0xFF,0x10,0x10,0x10,0x10,0xF0,0x00,0x00,0x00},
{0x00,0x00,0x0F,0x04,0x04,0x04,0x04,0xFF,0x04,0x04,0x04,0x04,0x0F,0x00,0x00,0x00},/*"中",0*/
};
void IIC_Start()
{
OLED_SCLK_Set();
OLED_SDIN_Set();
OLED_SDIN_Clr();
OLED_SCLK_Clr();
}
/**********************************************
//IIC Stop
**********************************************/
void IIC_Stop()
{
OLED_SCLK_Set() ;
// OLED_SCLK_Clr();
OLED_SDIN_Clr();
OLED_SDIN_Set();
}
void IIC_Wait_Ack()
{
OLED_SCLK_Set() ;
OLED_SCLK_Clr();
}
/**********************************************
// IIC Write byte
**********************************************/
void Write_IIC_Byte(unsigned char IIC_Byte)
{
unsigned char i;
unsigned char m,da;
da=IIC_Byte;
OLED_SCLK_Clr();
for(i=0;i<8;i++)
{
m=da;
// OLED_SCLK_Clr();
m=m&0x80;
if(m==0x80)
{OLED_SDIN_Set();}
else OLED_SDIN_Clr();
da=da<<1;
OLED_SCLK_Set();
OLED_SCLK_Clr();
}
}
/**********************************************
// IIC Write Command
**********************************************/
void Write_IIC_Command(unsigned char IIC_Command)
{
IIC_Start();
Write_IIC_Byte(0x78); //Slave address,SA0=0
IIC_Wait_Ack();
Write_IIC_Byte(0x00); //write command
IIC_Wait_Ack();
Write_IIC_Byte(IIC_Command);
IIC_Wait_Ack();
IIC_Stop();
}
/**********************************************
// IIC Write Data
**********************************************/
void Write_IIC_Data(unsigned char IIC_Data)
{
IIC_Start();
Write_IIC_Byte(0x78); //D/C#=0; R/W#=0
IIC_Wait_Ack();
Write_IIC_Byte(0x40); //write data
IIC_Wait_Ack();
Write_IIC_Byte(IIC_Data);
IIC_Wait_Ack();
IIC_Stop();
}
void OLED_WR_Byte(unsigned dat,unsigned cmd)
{
if(cmd)
{
Write_IIC_Data(dat);
}
else {
Write_IIC_Command(dat);
}
}
/********************************************
// fill_Picture
********************************************/
void fill_picture(unsigned char fill_Data)
{
unsigned char m,n;
for(m=0;m<8;m++)
{
OLED_WR_Byte(0xb0+m,0); //page0-page1
OLED_WR_Byte(0x00,0); //low column start address
OLED_WR_Byte(0x10,0); //high column start address
for(n=0;n<128;n++)
{
OLED_WR_Byte(fill_Data,1);
}
}
}
void Delay_1ms(unsigned int Del_1ms)
{
unsigned char j;
while(Del_1ms--)
{
for(j=0;j<123;j++);
}
}
void OLED_Set_Pos(unsigned char x, unsigned char y)
{
OLED_WR_Byte(0xb0+y,OLED_CMD);
OLED_WR_Byte(((x&0xf0)>>4)|0x10,OLED_CMD);
OLED_WR_Byte((x&0x0f),OLED_CMD);
}
void OLED_Display_On(void)
{
OLED_WR_Byte(0X8D,OLED_CMD);
OLED_WR_Byte(0X14,OLED_CMD); //DCDC ON
OLED_WR_Byte(0XAF,OLED_CMD); //DISPLAY ON
}
void OLED_Display_Off(void)
{
OLED_WR_Byte(0X8D,OLED_CMD);
OLED_WR_Byte(0X10,OLED_CMD); //DCDC OFF
OLED_WR_Byte(0XAE,OLED_CMD); //DISPLAY OFF
}
void OLED_Clear(void)
{
u8 i,n;
for(i=0;i<8;i++)
{
OLED_WR_Byte (0xb0+i,OLED_CMD);
OLED_WR_Byte (0x00,OLED_CMD);
OLED_WR_Byte (0x10,OLED_CMD);
for(n=0;n<128;n++)OLED_WR_Byte(0,OLED_DATA);
}
}
void OLED_On(void)
{
u8 i,n;
for(i=0;i<8;i++)
{
OLED_WR_Byte (0xb0+i,OLED_CMD);
OLED_WR_Byte (0x00,OLED_CMD);
OLED_WR_Byte (0x10,OLED_CMD);
for(n=0;n<128;n++)OLED_WR_Byte(1,OLED_DATA);
}
}
//x:0~127
//y:0~63
//size:16/12
void OLED_ShowChar(u8 x,u8 y,u8 chr,u8 Char_Size)
{
unsigned char c=0,i=0;
c=chr-' ';
if(x>Max_Column-1){x=0;y=y+2;}
if(Char_Size ==16)
{
OLED_Set_Pos(x,y);
for(i=0;i<8;i++)
OLED_WR_Byte(F8X16[c*16+i],OLED_DATA);
OLED_Set_Pos(x,y+1);
for(i=0;i<8;i++)
OLED_WR_Byte(F8X16[c*16+i+8],OLED_DATA);
}
else {
OLED_Set_Pos(x,y);
for(i=0;i<6;i++)
OLED_WR_Byte(F6x8[c][i],OLED_DATA);
}
}
u32 oled_pow(u8 m,u8 n)
{
u32 result=1;
while(n--)result*=m;
return result;
}
void OLED_ShowNum(u8 x,u8 y,u32 num,u8 len,u8 size2)
{
u8 t,temp;
u8 enshow=0;
for(t=0;t<len;t++)
{
temp=(num/oled_pow(10,len-t-1))%10;
if(enshow==0&&t<(len-1))
{
if(temp==0)
{
OLED_ShowChar(x+(size2/2)*t,y,' ',size2);
continue;
}else enshow=1;
}
OLED_ShowChar(x+(size2/2)*t,y,temp+'0',size2);
}
}
void OLED_ShowVI(u8 x,u8 y,u32 num,u8 size2)
{
OLED_ShowNum(x+size2*4-1,y,num%10,1,size2);
OLED_ShowNum(x+size2*3-1,y,num/10%10,1,size2);
OLED_ShowNum(x+size2*2-1,y,num/100%10,1,size2);
OLED_ShowString(x+size2*1-1,y,".",size2);
OLED_ShowNum(x-1,y,num/1000,1,size2);
}
void OLED_ShowString(u8 x,u8 y,u8 *chr,u8 Char_Size)
{
unsigned char j=0;
while (chr[j]!='\0')
{ OLED_ShowChar(x,y,chr[j],Char_Size);
x+=8;
if(x>120){x=0;y+=2;}
j++;
}
}
void OLED_Init(void)
{
P6DIR |= BIT3+BIT4;
Delay_1ms(200);
OLED_WR_Byte(0xAE,OLED_CMD);
OLED_WR_Byte(0x00,OLED_CMD);
OLED_WR_Byte(0x10,OLED_CMD);
OLED_WR_Byte(0x40,OLED_CMD);
OLED_WR_Byte(0xB0,OLED_CMD);
OLED_WR_Byte(0x81,OLED_CMD); // contract control
OLED_WR_Byte(0xFF,OLED_CMD);//--128
OLED_WR_Byte(0xA1,OLED_CMD);
OLED_WR_Byte(0xA6,OLED_CMD);//--normal / reverse
OLED_WR_Byte(0xA8,OLED_CMD);//--set multiplex ratio(1 to 64)
OLED_WR_Byte(0x3F,OLED_CMD);//--1/32 duty
OLED_WR_Byte(0xC8,OLED_CMD);
OLED_WR_Byte(0xD3,OLED_CMD);//-set display offset
OLED_WR_Byte(0x00,OLED_CMD);//
OLED_WR_Byte(0xD5,OLED_CMD);
OLED_WR_Byte(0x80,OLED_CMD);//
OLED_WR_Byte(0xD8,OLED_CMD);
OLED_WR_Byte(0x05,OLED_CMD);//
OLED_WR_Byte(0xD9,OLED_CMD);
OLED_WR_Byte(0xF1,OLED_CMD);//
OLED_WR_Byte(0xDA,OLED_CMD);
OLED_WR_Byte(0x12,OLED_CMD);//
OLED_WR_Byte(0xDB,OLED_CMD);
OLED_WR_Byte(0x30,OLED_CMD);//
OLED_WR_Byte(0x8D,OLED_CMD);
OLED_WR_Byte(0x14,OLED_CMD);//
OLED_WR_Byte(0xAF,OLED_CMD);
}五·MPU6050
---------------------------------------------等待后续更新(应该明天会更)---------------------------------------
---------------------------------------------更新于2021-08-05-15:58:13---------------------------------------
与OLED一样,软件I2C协议MPU6050的使用我也是从STM32那边移植过来的,MPU6050的STM32源码在野火论坛上可以找到,使用的时候只需要更改宏定义SCL和SDA置位清位以及void i2c_GPIO_Config(void)就行了,还有一个需要注意的是,访问MPU6050的寄存器需要读回当前SDA的状态信息,我自己写了一个int I2C_SDA_READ(void)函数,可返回SDA的电平状态,其余与野火的源代码并无太多差别
下面简介讲解一下这个MPU6050库的使用方法,通讯协议方面这个库也是软件I2C,在野火的MPU6050使用例程里,也有硬件I2C的解决方案,不过使用硬件I2C会不兼容OLED,I2C总线会经常挂掉,所以我在MSP430中也就没有使用硬件I2C,函数void MPU6050ReadAcc(short *accData),void MPU6050ReadGyro(short *gyroData),分别可以读回寄存器原始加速度值和角加速度值,具体MPU6050的例程详解还请参照野火的MPU6050
/*main.c部分*/
#include <mpu6050.h>
short Accel[3]; //MPU6050读回数据
void main (void)
{
WDT_A_hold(WDT_A_BASE);
i2c_GPIO_Config(); //软件I2C协议初始化
MPU6050_Init(); //MPU6050初始化
__enable_interrupt(); //开启全局中断
/
while(1)
{
MPU6050ReadAcc(Accel);
}
}/*mpu6050.h部分*/
/*
* mpu6050.h
*
* Created on: 2021年8月3日
* Author: 18771
*/
#ifndef MPU6050_H_
#define MPU6050_H_
#include <sys.h>
#define I2C_WR 0 //写控制位
#define I2C_RD 1 //读控制位
int I2C_SDA_READ(void);
void i2c_Start(void);
void i2c_Stop(void);
void i2c_SendByte(uint8_t _ucByte);
uint8_t i2c_ReadByte(uint8_t ack);
uint8_t i2c_WaitAck(void);
void i2c_Ack(void);
void i2c_NAck(void);
uint8_t i2c_CheckDevice(uint8_t _Address);
void i2c_GPIO_Config(void);
//模块的·A0引脚接GND,IIC的七位地址为0X68,若接到VC,需要改为0X69
#define MPU6050_SLAVE_ADDRESS (0x68<<1) //MPU6050器件读地址
#define MPU6050_WHO_AM_I 0x75
#define MPU6050_SMPLRT_DIV 0 //8000Hz
#define MPU6050_DLPF_CFG 0
#define MPU6050_GYRO_OUT 0x43 //MPU6050陀螺仪数据寄存器地址
#define MPU6050_ACC_OUT 0x3B //MPU6050加速度数据寄存器地址
#define MPU6050_ADDRESS_AD0_LOW 0x68 // address pin low (GND), default for InvenSense evaluation board
#define MPU6050_ADDRESS_AD0_HIGH 0x69 // address pin high (VCC)
#define MPU6050_DEFAULT_ADDRESS MPU6050_ADDRESS_AD0_LOW
#define MPU6050_RA_XG_OFFS_TC 0x00 //[7] PWR_MODE, [6:1] XG_OFFS_TC, [0] OTP_BNK_VLD
#define MPU6050_RA_YG_OFFS_TC 0x01 //[7] PWR_MODE, [6:1] YG_OFFS_TC, [0] OTP_BNK_VLD
#define MPU6050_RA_ZG_OFFS_TC 0x02 //[7] PWR_MODE, [6:1] ZG_OFFS_TC, [0] OTP_BNK_VLD
#define MPU6050_RA_X_FINE_GAIN 0x03 //[7:0] X_FINE_GAIN
#define MPU6050_RA_Y_FINE_GAIN 0x04 //[7:0] Y_FINE_GAIN
#define MPU6050_RA_Z_FINE_GAIN 0x05 //[7:0] Z_FINE_GAIN
#define MPU6050_RA_XA_OFFS_H 0x06 //[15:0] XA_OFFS
#define MPU6050_RA_XA_OFFS_L_TC 0x07
#define MPU6050_RA_YA_OFFS_H 0x08 //[15:0] YA_OFFS
#define MPU6050_RA_YA_OFFS_L_TC 0x09
#define MPU6050_RA_ZA_OFFS_H 0x0A //[15:0] ZA_OFFS
#define MPU6050_RA_ZA_OFFS_L_TC 0x0B
#define MPU6050_RA_XG_OFFS_USRH 0x13 //[15:0] XG_OFFS_USR
#define MPU6050_RA_XG_OFFS_USRL 0x14
#define MPU6050_RA_YG_OFFS_USRH 0x15 //[15:0] YG_OFFS_USR
#define MPU6050_RA_YG_OFFS_USRL 0x16
#define MPU6050_RA_ZG_OFFS_USRH 0x17 //[15:0] ZG_OFFS_USR
#define MPU6050_RA_ZG_OFFS_USRL 0x18
#define MPU6050_RA_SMPLRT_DIV 0x19
#define MPU6050_RA_CONFIG 0x1A
#define MPU6050_RA_GYRO_CONFIG 0x1B
#define MPU6050_RA_ACCEL_CONFIG 0x1C
#define MPU6050_RA_FF_THR 0x1D
#define MPU6050_RA_FF_DUR 0x1E
#define MPU6050_RA_MOT_THR 0x1F
#define MPU6050_RA_MOT_DUR 0x20
#define MPU6050_RA_ZRMOT_THR 0x21
#define MPU6050_RA_ZRMOT_DUR 0x22
#define MPU6050_RA_FIFO_EN 0x23
#define MPU6050_RA_I2C_MST_CTRL 0x24
#define MPU6050_RA_I2C_SLV0_ADDR 0x25
#define MPU6050_RA_I2C_SLV0_REG 0x26
#define MPU6050_RA_I2C_SLV0_CTRL 0x27
#define MPU6050_RA_I2C_SLV1_ADDR 0x28
#define MPU6050_RA_I2C_SLV1_REG 0x29
#define MPU6050_RA_I2C_SLV1_CTRL 0x2A
#define MPU6050_RA_I2C_SLV2_ADDR 0x2B
#define MPU6050_RA_I2C_SLV2_REG 0x2C
#define MPU6050_RA_I2C_SLV2_CTRL 0x2D
#define MPU6050_RA_I2C_SLV3_ADDR 0x2E
#define MPU6050_RA_I2C_SLV3_REG 0x2F
#define MPU6050_RA_I2C_SLV3_CTRL 0x30
#define MPU6050_RA_I2C_SLV4_ADDR 0x31
#define MPU6050_RA_I2C_SLV4_REG 0x32
#define MPU6050_RA_I2C_SLV4_DO 0x33
#define MPU6050_RA_I2C_SLV4_CTRL 0x34
#define MPU6050_RA_I2C_SLV4_DI 0x35
#define MPU6050_RA_I2C_MST_STATUS 0x36
#define MPU6050_RA_INT_PIN_CFG 0x37
#define MPU6050_RA_INT_ENABLE 0x38
#define MPU6050_RA_DMP_INT_STATUS 0x39
#define MPU6050_RA_INT_STATUS 0x3A
#define MPU6050_RA_ACCEL_XOUT_H 0x3B
#define MPU6050_RA_ACCEL_XOUT_L 0x3C
#define MPU6050_RA_ACCEL_YOUT_H 0x3D
#define MPU6050_RA_ACCEL_YOUT_L 0x3E
#define MPU6050_RA_ACCEL_ZOUT_H 0x3F
#define MPU6050_RA_ACCEL_ZOUT_L 0x40
#define MPU6050_RA_TEMP_OUT_H 0x41
#define MPU6050_RA_TEMP_OUT_L 0x42
#define MPU6050_RA_GYRO_XOUT_H 0x43
#define MPU6050_RA_GYRO_XOUT_L 0x44
#define MPU6050_RA_GYRO_YOUT_H 0x45
#define MPU6050_RA_GYRO_YOUT_L 0x46
#define MPU6050_RA_GYRO_ZOUT_H 0x47
#define MPU6050_RA_GYRO_ZOUT_L 0x48
#define MPU6050_RA_EXT_SENS_DATA_00 0x49
#define MPU6050_RA_EXT_SENS_DATA_01 0x4A
#define MPU6050_RA_EXT_SENS_DATA_02 0x4B
#define MPU6050_RA_EXT_SENS_DATA_03 0x4C
#define MPU6050_RA_EXT_SENS_DATA_04 0x4D
#define MPU6050_RA_EXT_SENS_DATA_05 0x4E
#define MPU6050_RA_EXT_SENS_DATA_06 0x4F
#define MPU6050_RA_EXT_SENS_DATA_07 0x50
#define MPU6050_RA_EXT_SENS_DATA_08 0x51
#define MPU6050_RA_EXT_SENS_DATA_09 0x52
#define MPU6050_RA_EXT_SENS_DATA_10 0x53
#define MPU6050_RA_EXT_SENS_DATA_11 0x54
#define MPU6050_RA_EXT_SENS_DATA_12 0x55
#define MPU6050_RA_EXT_SENS_DATA_13 0x56
#define MPU6050_RA_EXT_SENS_DATA_14 0x57
#define MPU6050_RA_EXT_SENS_DATA_15 0x58
#define MPU6050_RA_EXT_SENS_DATA_16 0x59
#define MPU6050_RA_EXT_SENS_DATA_17 0x5A
#define MPU6050_RA_EXT_SENS_DATA_18 0x5B
#define MPU6050_RA_EXT_SENS_DATA_19 0x5C
#define MPU6050_RA_EXT_SENS_DATA_20 0x5D
#define MPU6050_RA_EXT_SENS_DATA_21 0x5E
#define MPU6050_RA_EXT_SENS_DATA_22 0x5F
#define MPU6050_RA_EXT_SENS_DATA_23 0x60
#define MPU6050_RA_MOT_DETECT_STATUS 0x61
#define MPU6050_RA_I2C_SLV0_DO 0x63
#define MPU6050_RA_I2C_SLV1_DO 0x64
#define MPU6050_RA_I2C_SLV2_DO 0x65
#define MPU6050_RA_I2C_SLV3_DO 0x66
#define MPU6050_RA_I2C_MST_DELAY_CTRL 0x67
#define MPU6050_RA_SIGNAL_PATH_RESET 0x68
#define MPU6050_RA_MOT_DETECT_CTRL 0x69
#define MPU6050_RA_USER_CTRL 0x6A
#define MPU6050_RA_PWR_MGMT_1 0x6B
#define MPU6050_RA_PWR_MGMT_2 0x6C
#define MPU6050_RA_BANK_SEL 0x6D
#define MPU6050_RA_MEM_START_ADDR 0x6E
#define MPU6050_RA_MEM_R_W 0x6F
#define MPU6050_RA_DMP_CFG_1 0x70
#define MPU6050_RA_DMP_CFG_2 0x71
#define MPU6050_RA_FIFO_COUNTH 0x72
#define MPU6050_RA_FIFO_COUNTL 0x73
#define MPU6050_RA_FIFO_R_W 0x74
#define MPU6050_RA_WHO_AM_I 0x75
#define MPU6050_TC_PWR_MODE_BIT 7
#define MPU6050_TC_OFFSET_BIT 6
#define MPU6050_TC_OFFSET_LENGTH 6
#define MPU6050_TC_OTP_BNK_VLD_BIT 0
#define MPU6050_VDDIO_LEVEL_VLOGIC 0
#define MPU6050_VDDIO_LEVEL_VDD 1
#define MPU6050_CFG_EXT_SYNC_SET_BIT 5
#define MPU6050_CFG_EXT_SYNC_SET_LENGTH 3
#define MPU6050_CFG_DLPF_CFG_BIT 2
#define MPU6050_CFG_DLPF_CFG_LENGTH 3
#define MPU6050_EXT_SYNC_DISABLED 0x0
#define MPU6050_EXT_SYNC_TEMP_OUT_L 0x1
#define MPU6050_EXT_SYNC_GYRO_XOUT_L 0x2
#define MPU6050_EXT_SYNC_GYRO_YOUT_L 0x3
#define MPU6050_EXT_SYNC_GYRO_ZOUT_L 0x4
#define MPU6050_EXT_SYNC_ACCEL_XOUT_L 0x5
#define MPU6050_EXT_SYNC_ACCEL_YOUT_L 0x6
#define MPU6050_EXT_SYNC_ACCEL_ZOUT_L 0x7
#define MPU6050_DLPF_BW_256 0x00
#define MPU6050_DLPF_BW_188 0x01
#define MPU6050_DLPF_BW_98 0x02
#define MPU6050_DLPF_BW_42 0x03
#define MPU6050_DLPF_BW_20 0x04
#define MPU6050_DLPF_BW_10 0x05
#define MPU6050_DLPF_BW_5 0x06
#define MPU6050_GCONFIG_FS_SEL_BIT 4
#define MPU6050_GCONFIG_FS_SEL_LENGTH 2
#define MPU6050_GYRO_FS_250 0x00
#define MPU6050_GYRO_FS_500 0x01
#define MPU6050_GYRO_FS_1000 0x02
#define MPU6050_GYRO_FS_2000 0x03
#define MPU6050_ACONFIG_XA_ST_BIT 7
#define MPU6050_ACONFIG_YA_ST_BIT 6
#define MPU6050_ACONFIG_ZA_ST_BIT 5
#define MPU6050_ACONFIG_AFS_SEL_BIT 4
#define MPU6050_ACONFIG_AFS_SEL_LENGTH 2
#define MPU6050_ACONFIG_ACCEL_HPF_BIT 2
#define MPU6050_ACONFIG_ACCEL_HPF_LENGTH 3
#define MPU6050_ACCEL_FS_2 0x00
#define MPU6050_ACCEL_FS_4 0x01
#define MPU6050_ACCEL_FS_8 0x02
#define MPU6050_ACCEL_FS_16 0x03
#define MPU6050_DHPF_RESET 0x00
#define MPU6050_DHPF_5 0x01
#define MPU6050_DHPF_2P5 0x02
#define MPU6050_DHPF_1P25 0x03
#define MPU6050_DHPF_0P63 0x04
#define MPU6050_DHPF_HOLD 0x07
#define MPU6050_TEMP_FIFO_EN_BIT 7
#define MPU6050_XG_FIFO_EN_BIT 6
#define MPU6050_YG_FIFO_EN_BIT 5
#define MPU6050_ZG_FIFO_EN_BIT 4
#define MPU6050_ACCEL_FIFO_EN_BIT 3
#define MPU6050_SLV2_FIFO_EN_BIT 2
#define MPU6050_SLV1_FIFO_EN_BIT 1
#define MPU6050_SLV0_FIFO_EN_BIT 0
#define MPU6050_MULT_MST_EN_BIT 7
#define MPU6050_WAIT_FOR_ES_BIT 6
#define MPU6050_SLV_3_FIFO_EN_BIT 5
#define MPU6050_I2C_MST_P_NSR_BIT 4
#define MPU6050_I2C_MST_CLK_BIT 3
#define MPU6050_I2C_MST_CLK_LENGTH 4
#define MPU6050_CLOCK_DIV_348 0x0
#define MPU6050_CLOCK_DIV_333 0x1
#define MPU6050_CLOCK_DIV_320 0x2
#define MPU6050_CLOCK_DIV_308 0x3
#define MPU6050_CLOCK_DIV_296 0x4
#define MPU6050_CLOCK_DIV_286 0x5
#define MPU6050_CLOCK_DIV_276 0x6
#define MPU6050_CLOCK_DIV_267 0x7
#define MPU6050_CLOCK_DIV_258 0x8
#define MPU6050_CLOCK_DIV_500 0x9
#define MPU6050_CLOCK_DIV_471 0xA
#define MPU6050_CLOCK_DIV_444 0xB
#define MPU6050_CLOCK_DIV_421 0xC
#define MPU6050_CLOCK_DIV_400 0xD
#define MPU6050_CLOCK_DIV_381 0xE
#define MPU6050_CLOCK_DIV_364 0xF
#define MPU6050_I2C_SLV_RW_BIT 7
#define MPU6050_I2C_SLV_ADDR_BIT 6
#define MPU6050_I2C_SLV_ADDR_LENGTH 7
#define MPU6050_I2C_SLV_EN_BIT 7
#define MPU6050_I2C_SLV_BYTE_SW_BIT 6
#define MPU6050_I2C_SLV_REG_DIS_BIT 5
#define MPU6050_I2C_SLV_GRP_BIT 4
#define MPU6050_I2C_SLV_LEN_BIT 3
#define MPU6050_I2C_SLV_LEN_LENGTH 4
#define MPU6050_I2C_SLV4_RW_BIT 7
#define MPU6050_I2C_SLV4_ADDR_BIT 6
#define MPU6050_I2C_SLV4_ADDR_LENGTH 7
#define MPU6050_I2C_SLV4_EN_BIT 7
#define MPU6050_I2C_SLV4_INT_EN_BIT 6
#define MPU6050_I2C_SLV4_REG_DIS_BIT 5
#define MPU6050_I2C_SLV4_MST_DLY_BIT 4
#define MPU6050_I2C_SLV4_MST_DLY_LENGTH 5
#define MPU6050_MST_PASS_THROUGH_BIT 7
#define MPU6050_MST_I2C_SLV4_DONE_BIT 6
#define MPU6050_MST_I2C_LOST_ARB_BIT 5
#define MPU6050_MST_I2C_SLV4_NACK_BIT 4
#define MPU6050_MST_I2C_SLV3_NACK_BIT 3
#define MPU6050_MST_I2C_SLV2_NACK_BIT 2
#define MPU6050_MST_I2C_SLV1_NACK_BIT 1
#define MPU6050_MST_I2C_SLV0_NACK_BIT 0
#define MPU6050_INTCFG_INT_LEVEL_BIT 7
#define MPU6050_INTCFG_INT_OPEN_BIT 6
#define MPU6050_INTCFG_LATCH_INT_EN_BIT 5
#define MPU6050_INTCFG_INT_RD_CLEAR_BIT 4
#define MPU6050_INTCFG_FSYNC_INT_LEVEL_BIT 3
#define MPU6050_INTCFG_FSYNC_INT_EN_BIT 2
#define MPU6050_INTCFG_I2C_BYPASS_EN_BIT 1
#define MPU6050_INTCFG_CLKOUT_EN_BIT 0
#define MPU6050_INTMODE_ACTIVEHIGH 0x00
#define MPU6050_INTMODE_ACTIVELOW 0x01
#define MPU6050_INTDRV_PUSHPULL 0x00
#define MPU6050_INTDRV_OPENDRAIN 0x01
#define MPU6050_INTLATCH_50USPULSE 0x00
#define MPU6050_INTLATCH_WAITCLEAR 0x01
#define MPU6050_INTCLEAR_STATUSREAD 0x00
#define MPU6050_INTCLEAR_ANYREAD 0x01
#define MPU6050_INTERRUPT_FF_BIT 7
#define MPU6050_INTERRUPT_MOT_BIT 6
#define MPU6050_INTERRUPT_ZMOT_BIT 5
#define MPU6050_INTERRUPT_FIFO_OFLOW_BIT 4
#define MPU6050_INTERRUPT_I2C_MST_INT_BIT 3
#define MPU6050_INTERRUPT_PLL_RDY_INT_BIT 2
#define MPU6050_INTERRUPT_DMP_INT_BIT 1
#define MPU6050_INTERRUPT_DATA_RDY_BIT 0
// TODO: figure out what these actually do
// UMPL source code is not very obivous
#define MPU6050_DMPINT_5_BIT 5
#define MPU6050_DMPINT_4_BIT 4
#define MPU6050_DMPINT_3_BIT 3
#define MPU6050_DMPINT_2_BIT 2
#define MPU6050_DMPINT_1_BIT 1
#define MPU6050_DMPINT_0_BIT 0
#define MPU6050_MOTION_MOT_XNEG_BIT 7
#define MPU6050_MOTION_MOT_XPOS_BIT 6
#define MPU6050_MOTION_MOT_YNEG_BIT 5
#define MPU6050_MOTION_MOT_YPOS_BIT 4
#define MPU6050_MOTION_MOT_ZNEG_BIT 3
#define MPU6050_MOTION_MOT_ZPOS_BIT 2
#define MPU6050_MOTION_MOT_ZRMOT_BIT 0
#define MPU6050_DELAYCTRL_DELAY_ES_SHADOW_BIT 7
#define MPU6050_DELAYCTRL_I2C_SLV4_DLY_EN_BIT 4
#define MPU6050_DELAYCTRL_I2C_SLV3_DLY_EN_BIT 3
#define MPU6050_DELAYCTRL_I2C_SLV2_DLY_EN_BIT 2
#define MPU6050_DELAYCTRL_I2C_SLV1_DLY_EN_BIT 1
#define MPU6050_DELAYCTRL_I2C_SLV0_DLY_EN_BIT 0
#define MPU6050_PATHRESET_GYRO_RESET_BIT 2
#define MPU6050_PATHRESET_ACCEL_RESET_BIT 1
#define MPU6050_PATHRESET_TEMP_RESET_BIT 0
#define MPU6050_DETECT_ACCEL_ON_DELAY_BIT 5
#define MPU6050_DETECT_ACCEL_ON_DELAY_LENGTH 2
#define MPU6050_DETECT_FF_COUNT_BIT 3
#define MPU6050_DETECT_FF_COUNT_LENGTH 2
#define MPU6050_DETECT_MOT_COUNT_BIT 1
#define MPU6050_DETECT_MOT_COUNT_LENGTH 2
#define MPU6050_DETECT_DECREMENT_RESET 0x0
#define MPU6050_DETECT_DECREMENT_1 0x1
#define MPU6050_DETECT_DECREMENT_2 0x2
#define MPU6050_DETECT_DECREMENT_4 0x3
#define MPU6050_USERCTRL_DMP_EN_BIT 7
#define MPU6050_USERCTRL_FIFO_EN_BIT 6
#define MPU6050_USERCTRL_I2C_MST_EN_BIT 5
#define MPU6050_USERCTRL_I2C_IF_DIS_BIT 4
#define MPU6050_USERCTRL_DMP_RESET_BIT 3
#define MPU6050_USERCTRL_FIFO_RESET_BIT 2
#define MPU6050_USERCTRL_I2C_MST_RESET_BIT 1
#define MPU6050_USERCTRL_SIG_COND_RESET_BIT 0
#define MPU6050_PWR1_DEVICE_RESET_BIT 7
#define MPU6050_PWR1_SLEEP_BIT 6
#define MPU6050_PWR1_CYCLE_BIT 5
#define MPU6050_PWR1_TEMP_DIS_BIT 3
#define MPU6050_PWR1_CLKSEL_BIT 2
#define MPU6050_PWR1_CLKSEL_LENGTH 3
#define MPU6050_CLOCK_INTERNAL 0x00
#define MPU6050_CLOCK_PLL_XGYRO 0x01
#define MPU6050_CLOCK_PLL_YGYRO 0x02
#define MPU6050_CLOCK_PLL_ZGYRO 0x03
#define MPU6050_CLOCK_PLL_EXT32K 0x04
#define MPU6050_CLOCK_PLL_EXT19M 0x05
#define MPU6050_CLOCK_KEEP_RESET 0x07
#define MPU6050_PWR2_LP_WAKE_CTRL_BIT 7
#define MPU6050_PWR2_LP_WAKE_CTRL_LENGTH 2
#define MPU6050_PWR2_STBY_XA_BIT 5
#define MPU6050_PWR2_STBY_YA_BIT 4
#define MPU6050_PWR2_STBY_ZA_BIT 3
#define MPU6050_PWR2_STBY_XG_BIT 2
#define MPU6050_PWR2_STBY_YG_BIT 1
#define MPU6050_PWR2_STBY_ZG_BIT 0
#define MPU6050_WAKE_FREQ_1P25 0x0
#define MPU6050_WAKE_FREQ_2P5 0x1
#define MPU6050_WAKE_FREQ_5 0x2
#define MPU6050_WAKE_FREQ_10 0x3
#define MPU6050_BANKSEL_PRFTCH_EN_BIT 6
#define MPU6050_BANKSEL_CFG_USER_BANK_BIT 5
#define MPU6050_BANKSEL_MEM_SEL_BIT 4
#define MPU6050_BANKSEL_MEM_SEL_LENGTH 5
#define MPU6050_WHO_AM_I_BIT 6
#define MPU6050_WHO_AM_I_LENGTH 6
#define MPU6050_DMP_MEMORY_BANKS 8
#define MPU6050_DMP_MEMORY_BANK_SIZE 256
#define MPU6050_DMP_MEMORY_CHUNK_SIZE 16
void MPU6050ReadTemp(short *tempData);
void MPU6050ReadGyro(short *gyroData);
void MPU6050ReadAcc(short *accData);
void MPU6050_ReturnTemp(float *Temperature);
void MPU6050_Init(void);
uint8_t MPU6050ReadID(void);
void PMU6050_ReadData(u8 reg_add,unsigned char*Read,u8 num);
void PMU6050_WriteReg(u8 reg_add,u8 reg_dat);
void MPU6050_PWR_MGMT_1_INIT(void);
#endif /* MPU6050_H_ */
/*
* mpu6050.c
*
* Created on: 2021年8月3日
* Author: 18771
*/
/*
应用说明
在访问IIC设备之前,先调用i2c_CheckDevice()检测I2C设备是否正常,该函数会配置IO
*/
#include <sys.h>
///*定义I2C总线连接的IO端口,可任意更改SCL和SDA引脚 */
//#define GPIO_PORT_I2C GPIOB /* GPIO端口 */
//#define RCC_I2C_PORT RCC_APB2Periph_GPIOB /* 端口时钟 */
//#define I2C_SCL_PIN GPIO_Pin_10 /* SCL的GPIO */
//#define I2C_SDA_PIN GPIO_Pin_11 /* SDA的GPIO */
//
///*定义读写SCL和SDA的宏,以增加代码的可移植性和可阅读性 */
// #define I2C_SCL_1() GPIO_SetBits(GPIO_PORT_I2C, I2C_SCL_PIN) /* SCL = 1 */
// #define I2C_SCL_0() GPIO_ResetBits(GPIO_PORT_I2C, I2C_SCL_PIN) /* SCL = 0 */
//
// #define I2C_SDA_1() GPIO_SetBits(GPIO_PORT_I2C, I2C_SDA_PIN) /* SDA = 1 */
// #define I2C_SDA_0() GPIO_ResetBits(GPIO_PORT_I2C, I2C_SDA_PIN) /* SDA = 0 */
//
// #define I2C_SDA_READ() GPIO_ReadInputDataBit(GPIO_PORT_I2C, I2C_SDA_PIN) /* 读SDA口线的状态 */
/*定义读写SCL和SDA的宏,以增加代码的可移植性和可阅读性 */
#define I2C_SCL_1() P3OUT|=BIT5 /* SCL = 1 */
#define I2C_SCL_0() P3OUT&=~BIT5 /* SCL = 0 */
#define I2C_SDA_1() P3OUT|=BIT6 /* SDA = 1 */
#define I2C_SDA_0() P3OUT&=~BIT6 /* SDA = 0 */
// #define I2C_SDA_READ() P3IN&=BIT6 /* 读SDA口线的状态 */
int I2C_SDA_READ(void)
{
if(P3IN&BIT6)
{ return 1;}
else
return 0 ;
}
/*
*********************************************************************************************************
* 配置IO,模拟IO实现
*********************************************************************************************************
*/
void i2c_GPIO_Config(void)
{
P3DIR |= BIT5+BIT6;
P3OUT |= BIT5+BIT6;
/*给一个停止信号,复位I2C总线上的所有设备到待机模式 */
i2c_Stop();
}
/*
*********************************************************************************************************
* I2C总线位延迟,最快400KHz
*********************************************************************************************************
*/
static void i2c_Delay(void)
{
uint8_t i;
for (i = 0; i < 5; i++);
}
/*
*********************************************************************************************************
CPU发起I2C总线信号
*********************************************************************************************************
*/
void i2c_Start(void)
{
/* 当SCL高电平时,SD出现一个下跳沿表示I2C总线启动信号 */
I2C_SDA_1();
I2C_SCL_1();
i2c_Delay();
I2C_SDA_0();
i2c_Delay();
I2C_SCL_0();
i2c_Delay();
}
/*
*********************************************************************************************************
CPU发起I2C总线停止信号
*********************************************************************************************************
*/
void i2c_Stop(void)
{
/* 当SCL高电平时,SDA出现一个上跳沿表示I2C总线停止信号 */
I2C_SDA_0();
I2C_SCL_1();
i2c_Delay();
I2C_SDA_1();
}
/*
*********************************************************************************************************
CPU向I2C总线设备发送8bit数据
*********************************************************************************************************
*/
void i2c_SendByte(uint8_t _ucByte)
{
uint8_t i;
/*先发送字节的高位bit7 */
for (i = 0; i < 8; i++)
{
if (_ucByte & 0x80)
{
I2C_SDA_1();
}
else
{
I2C_SDA_0();
}
i2c_Delay();
I2C_SCL_1();
i2c_Delay();
I2C_SCL_0();
if (i == 7)
{
I2C_SDA_1(); // 释放总线
}
_ucByte <<= 1; /* 左移一个bit */
i2c_Delay();
}
}
/*
*********************************************************************************************************
* CPU从总线读取8bit数据
*********************************************************************************************************
*/
uint8_t i2c_ReadByte(u8 ack)
{
uint8_t i;
uint8_t value;
/* 读到第一个bit为数据的bit7 */
value = 0;
for (i = 0; i < 8; i++)
{
value <<= 1;
I2C_SCL_1();
i2c_Delay();
if (I2C_SDA_READ())
{
value++;
}
I2C_SCL_0();
i2c_Delay();
}
if(ack==0)
i2c_NAck();
else
i2c_Ack();
return value;
}
/*
*********************************************************************************************************
*CPU产生一个时钟,并读取器件的ACK应答信号
*********************************************************************************************************
*/
uint8_t i2c_WaitAck(void)
{
uint8_t re;
I2C_SDA_1(); /* CPU释放SDA总线*/
i2c_Delay();
I2C_SCL_1(); /* CPU驱动SCL=1,此时器件会返回ACK应答*/
i2c_Delay();
if (I2C_SDA_READ()) /* CPU读取SDA口线的状态*/
{
re = 1;
}
else
{
re = 0;
}
I2C_SCL_0();
i2c_Delay();
return re;
}
/*
*********************************************************************************************************
* CPU产生一个ACK信号
*********************************************************************************************************
*/
void i2c_Ack(void)
{
I2C_SDA_0(); /*SDA = 0 */
i2c_Delay();
I2C_SCL_1(); /* 产生一个时钟 */
i2c_Delay();
I2C_SCL_0();
i2c_Delay();
I2C_SDA_1(); /* 释放SDA总线 */
}
/*
*********************************************************************************************************
* 产生一个NAck信号
*********************************************************************************************************
*/
void i2c_NAck(void)
{
I2C_SDA_1(); /* SDA = 1 */
i2c_Delay();
I2C_SCL_1(); /* 产生一个时钟 */
i2c_Delay();
I2C_SCL_0();
i2c_Delay();
}
/*
*********************************************************************************************************
* 检测I2C总线设备,CPU发送设备地址,然后读取设备应答来判断该设备是否存在
*********************************************************************************************************
*/
uint8_t i2c_CheckDevice(uint8_t _Address)
{
uint8_t ucAck;
i2c_GPIO_Config(); /*配置GPIO*/
i2c_Start(); /*发送启动信号·*/
i2c_SendByte(_Address|I2C_WR);
ucAck = i2c_WaitAck(); /*检测ACK应答*/
i2c_Stop(); /*发送停止信号 */
return ucAck;
}
/**
写数据到MPU6050寄存器
*/
void MPU6050_WriteReg(u8 reg_add,u8 reg_dat)
{
i2c_Start();
i2c_SendByte(MPU6050_SLAVE_ADDRESS);
i2c_WaitAck();
i2c_SendByte(reg_add);
i2c_WaitAck();
i2c_SendByte(reg_dat);
i2c_WaitAck();
i2c_Stop();
}
/**
从MPU6050寄存器读取数据
*/
void MPU6050_ReadData(u8 reg_add,unsigned char*Read,u8 num)
{
unsigned char i;
i2c_Start();
i2c_SendByte(MPU6050_SLAVE_ADDRESS);
i2c_WaitAck();
i2c_SendByte(reg_add);
i2c_WaitAck();
i2c_Start();
i2c_SendByte(MPU6050_SLAVE_ADDRESS+1);
i2c_WaitAck();
for(i=0;i<(num-1);i++){
*Read=i2c_ReadByte(1);
Read++;
}
*Read=i2c_ReadByte(0);
i2c_Stop();
}
/**
初始化MPU6050芯片
*/
void MPU6050_Init(void)
{
int i=0,j=0;
//初始化之前需延时一段时间
for(i=0;i<1000;i++)
{
for(j=0;j<1000;j++)
{
;
}
}
MPU6050_WriteReg(MPU6050_RA_PWR_MGMT_1, 0x00); //解除休眠状态
MPU6050_WriteReg(MPU6050_RA_SMPLRT_DIV , 0x07); //陀螺仪采样率 1KHz
MPU6050_WriteReg(MPU6050_RA_CONFIG , 0x06); //低通滤波器设置,截止频率是1K,带宽是5K
MPU6050_WriteReg(MPU6050_RA_ACCEL_CONFIG , 0x00); //配置加速度传感器工作在2G模式,不自检
MPU6050_WriteReg(MPU6050_RA_GYRO_CONFIG, 0x18); //陀螺仪自检及测量范围,典型:0x18
}
/**
读取MPU6050的ID
*/
uint8_t MPU6050ReadID(void)
{
unsigned char Re = 0;
MPU6050_ReadData(MPU6050_RA_WHO_AM_I,&Re,1); //读器件地址
if(Re != 0x68)
{
send1_buf("检测不到陀螺仪\r\n");
return 0;
}
else
{
send1_buf("陀螺仪状态正常\r\n");
return 1;
}
}
/**
读取陀螺仪加速度数据
*/
void MPU6050ReadAcc(short *accData)
{
u8 buf[6];
MPU6050_ReadData(MPU6050_ACC_OUT, buf, 6);
accData[0] = (buf[0] << 8) | buf[1];
accData[1] = (buf[2] << 8) | buf[3];
accData[2] = (buf[4] << 8) | buf[5];
}
/**
读取陀螺仪角加速度数据
*/
void MPU6050ReadGyro(short *gyroData)
{
u8 buf[6];
MPU6050_ReadData(MPU6050_GYRO_OUT,buf,6);
gyroData[0] = (buf[0] << 8) | buf[1];
gyroData[1] = (buf[2] << 8) | buf[3];
gyroData[2] = (buf[4] << 8) | buf[5];
}
/**
读取原始温度
*/
void MPU6050ReadTemp(short *tempData)
{
u8 buf[2];
MPU6050_ReadData(MPU6050_RA_TEMP_OUT_H,buf,2); //读温度
*tempData = (buf[0] << 8) | buf[1];
}
/**
将原始温度转换为摄氏度
*/
void MPU6050_ReturnTemp(float *Temperature)
{
short temp3;
u8 buf[2];
MPU6050_ReadData(MPU6050_RA_TEMP_OUT_H,buf,2);
temp3= (buf[0] << 8) | buf[1];
*Temperature=((double) temp3/340.0)+36.53;
}六·工程源码
百度云链接:https://pan.baidu.com/s/1ExXd9izre5nG0bmySn8c6A
提取码:4096
解压后就是完整的CCS工程文件,希望我的分享能够帮到有需要的同学
最后编辑于2021-08-05-16:38:23

 浙公网安备 33010602011771号
浙公网安备 33010602011771号