怎样理解控制系统中的带宽
0. 写在前面
在控制系统的稳定性与动态特性分析中,总少不了“带宽”这个量,本文尝试从带宽的定义,对系统动态特性的影响及其与系统稳定性之间的相关关系进行介绍。由于作者非控制专业科班,在表述中可能出现不专业的名词,如有错误还请指出便于改正。
1. 带宽的定义
“带宽”是一个非常宽泛的概念,在通信,控制以及信号处理中都常出现。而本文针对控制系统中带宽相关内容进行讨论,希望为读者提供一个理解带宽概念的参考内容。
从宏观的角度上来说,在线性定常系统(LTI)中,假定一个单输入单输出系统,对任意输入的激励,必然有相对应的输出响应。从频域的角度来说,如果我们知道激励信号从0 Hz开始到\(\infty\)时,系统输出的响应,那么我们就得到了该系统的频域特性,可以据此描绘输出与输入信号的幅值与相角之间的关系也即可以用Bode图来表示该系统的特性。
而对于控制系统而言,跟随给定,抵抗扰动就是其目标。通常以系统某个或多个变量的反馈形成闭环来实现该目标。在这个过程中,就有了所谓“开环传递函数”与“闭环传递函数”两个概念。这里的开环传递函数为\(G(s)H(s)\),而闭环传递函数为\(G(s)/(1+G(s)H(s))\)。对于开环传递函数,一般以开环截止频率(开环幅频特性曲线穿越0 dB线的频率,常记为\(\omega_{c}\))描述其特性,而闭环传递函数以闭环带宽(闭环幅频特性中幅值相比0 Hz频率下降3 dB的频率,常记为\(\omega_{b}\))分析其特性。当然,这里闭环带宽为什么以幅值下降3 dB作为度量,这时其幅值为原信号的\(\sqrt{2}/2\),从能量上衰减了1/2,可能这就是原因。
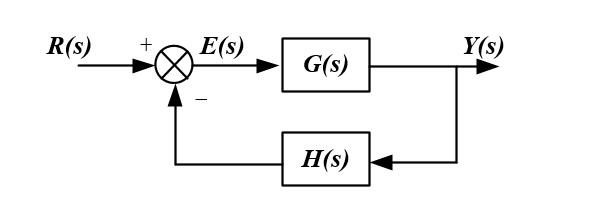
虽然开环截止频率与闭环截止频率(闭环带宽)是两个不同的物理量,但在控制系统分析中,常采用开环传函分析闭环特性,因此二者实际存在一定的相关关系。开环截止频率与单位负反馈的闭环带宽具有同向性,也就是二者是同向增大的,并且有\(\omega_{b}>\omega_{c}\)。
以一个二阶开环系统\(G_{ol}\)为例进行分析,其单位负反馈闭环传递函数为\(G_{cl}\),传递函数示例为:
对于该典型系统的开环截止频率和闭环带宽的计算,可以求解满足下式的频率:
求解结果为:
给出闭环带宽与开环截止频率比值随\(\zeta\)变化的曲线为:
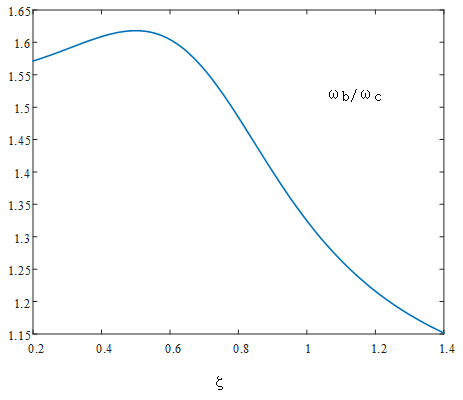
很明显,在\(\zeta\)从0.2变化到1.4的过程中,闭环带宽始终大于开环截止频率。
下面通过一个示例进一步说明。
画出其bode图为
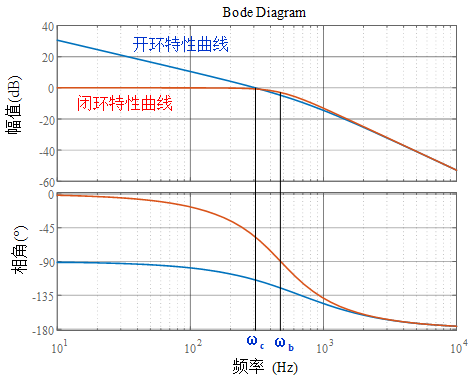
从闭环特性曲线上可以看到,对于该系统,在频率小于闭环带宽\(\omega_{b}\)的时候,幅频曲线的幅值为0 dB,也就是增益为,由此知道参考信号通过该系统后幅值将不会发生变化。而相频特性曲线中,随着频率的增加相角不断下降,也就是对应频率的信号会有滞后的效应。
2. 带宽对系统动态特性的影响
根据前节的内容,在闭环系统带宽频率内,输出信号可以很好的跟随输出信号,而当输入信号频率超出带宽频率后,其幅值将会被衰减。
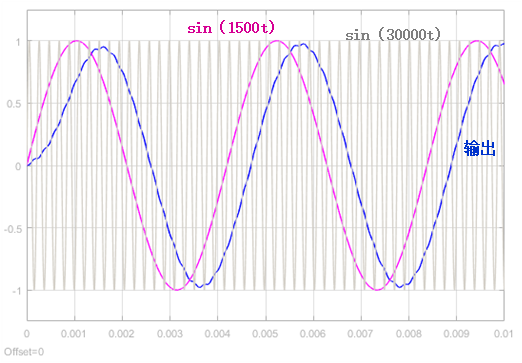
我们以如下信号作为输入:
经过闭环系统后,输出信号如图中蓝色曲线所示。可以很明显的看出,输出信号中,主要分量为\(sin(1500t)\)对应的频率,并且由一定的相位移,而\(sin(30000t)\)对应的信号基本已经被衰减,分量大大减小。
由此我们可以验证前节的结论,闭环带宽频率内的信号可以很好地跟随,但可能存在相位移,而带宽外的信号将会被衰减。上面的例子是针对两个信号叠加的情况,当输入信号为阶跃时,输出响应又会如何。实际上,对于阶跃信号,在频域内各个频率均有分量,且其幅值随着频率的增加而下降。这时,阶跃响应可以体现系统对给定信号的跟随特性。
在我们改变闭环系统\(G_{cl}\)的\(\omega_{n}\)后,系统的阶跃响应如图所示:
从图中可以看到,随着\(\omega_{n}\)的增加,系统的阶跃响应输出就越快达到稳定。对于二阶系统而言,\(\omega_{n}\)越大则系统闭环带宽越大。因此,还可以初步得到结论:带宽越大,能够复现的输入信号范围就越宽,系统响应速度就越快。
然而,系统带宽并非越高越好,控制系统在稳态情况下控制对象频率通常固定,而系统噪声不可避免,在带宽过大的情况下,系统对噪声的响应也比较明显,这会使输出中掺杂不需要的信号而影响系统的输出质量。因此,在控制系统的设计中,系统的动态特性与抗扰性能通常需要进行折中选择。
3. 闭环带宽与系统稳定性之间的关系
除了高频噪声与动态响应对带宽的折中限制以外,系统稳定性同样与闭环带宽之间有着一定的联系。通常利用开环传递函数分析闭环系统的稳定性。要保证闭环系统的稳定,要求开环传递函数具有一定的相角裕度与幅值裕度。
然而,在数字控制系统中,由于各种惯性环节以及纯延时环节的存在,相频曲线不断被拉低,系统开环传递函数的相频曲线可能存在对-180°线的穿越。那么要保证系统的稳定性,必须要求开环传递函数的幅频曲线在穿越-180°线时已经小于0。这就限制了开环截止频率的大小,由于开环截止频率与闭环带宽之间的正向相关性,闭环带宽从而受到限制。因此,综合动态响应,高频噪声以及系统稳定性等因素,要想满足期望的系统,常需要添加额外控制器对系统进行改造。
在基于PWM控制的应用场合,低开关频率下系统延时通常都较大,因此闭环带宽都较低。为了提高动态特性,通常可以利用相角超前的补偿器进行改造,可以使用的有非理想PD控制器,Smith预估补偿器,巴特worth滤波器等,在保证系统稳定性的前提下进行相角补偿,提高带宽。
参考资料:
1.控制研究中的带宽如何理解 https://www.zhihu.com/question/40756707/answer/91671022
2.控制系统中带宽的理解 https://blog.csdn.net/qq_39554681/article/details/89364178
3.如何入门自动控制理论 https://zhuanlan.zhihu.com/p/42615269

 浙公网安备 33010602011771号
浙公网安备 33010602011771号