[Fundamental of Power Electronics]-PART II-9. 控制器设计-9.5 控制器的设计
9.5 控制器设计
现在让我们来考虑如何设计控制器系统,来满足有关抑制扰动,瞬态响应以及稳定性的规范或者说设计目标。典型的直流控制器设计可以用以下规范定义:
1.负载电流变化对输出电压调节的影响。当负载电流在规定方式变化时,输出电压必须保持在指定范围内。这就相当于对式(9.6)的闭环输出阻抗的最大幅值进行了限制。这里重复给出:
如果在某些频率范围内,开环输出阻抗\(Z_{out}\)幅值超过限值,那么环路增益\(T\)在这个频率范围内必须足够大,来使得式(9.51)的闭环输出阻抗的幅值小于限值。
2.输入电压变化(例如:在交流电源频率的二次谐波处)对输出电压调节的影响。通常在交流输入频率的二次谐波上(120Hz或者100Hz),对输出电压的变化幅度设置特定的最大限值。如果我们知道变换器输入端出现的整流电压\(\hat{v}_{g}\)纹波幅值,那么我们就可以用式(9.5)的闭环输入-输出传递函数来计算最终的输出电压\(\hat{v}\)纹波 ,这里重复给出:
可以通过增大纹波频率下的环路增益幅值来减小输出电压纹波。在一个典型良好的设计中,\(||T||\)在120Hz处是20dB甚至更高(电网频率60Hz),从而使得式(9.52)的传递函数在幅值上要小于开环输入-输出传递函数\(||G_{vg}||\)一个数量级。
3.动态响应时间。当发生了大于指定的干扰,例如负载电流或者输入电压发生了很大的阶跃变化,输出变压可能发生瞬变。在这个瞬态期间,输出电压通常会偏离其指定的允许范围。最终,反馈回路工作使得输出电压返回限值之内。这个过程所需的时间就是动态响应时间。通常可以通过增加反馈环路穿越频率来缩短响应时间。
4.过冲和振铃。如9.4.4节中讨论的,瞬态响应中允许的过冲和振铃值可能受到限制。这样的规定意味着相位裕度必须足够大。
这些要求中的每一个对环路增益\(T(s)\)施加约束。因此,控制系统的设计涉及到对环路增益的修正。如图9.2所示,为此目的,添加了一个补偿器网络。下面讨论几种设计补偿器传递函数\(G_{c}\)的策略。
9.5.1 超前补偿器(PD)
这种类型的补偿器传递函数用于改善相位裕度。在远小于穿越频率\(f_{c}\)的\(f_{z}\),添加了一个零点到环路增益中,从而使\(T(s)\)的相位裕度增加到所需的值。超前补偿器也称为比例-微分或PD控制器,在高频下,零点使得补偿器对误差信号进行微分。它通常在包含两极点响应的系统中进行应用。通过使用这种类型的补偿器,可以在保持可接受的相位裕度的同时扩展反馈环路的带宽(也就是穿越频率)。(译者:这里穿越频率与带宽之间的关系可以这么定性的理解)。
零点的副作用就是它使得补偿器的增益随着频率以+20dB每十倍频程的斜率增加。因此,必须采取措施确保\(||T||\)在所需的穿越频率下保持等于1。并且,由于任何实际的放大器的增益在高频下都应趋于零,因此补偿器传递函数\(G_{c}(s)\)必须包含高频极点。(译者:这里并未采用理想PD,因为其物理实现不了)。这些极点还具有衰减高频噪声的有益作用。特别需要注意的是输出电压和反馈信号中存在的开关频率谐波。如果补偿器在开关频率处的增益过大,则这些开关谐波可能会被补偿器放大,并可能干扰脉冲宽度调制器的正常工作(参见7.3节)。因此,补偿器网络中的极点频率应该小于开关频率。这些考虑因素通常会限制穿越频率\(f_{c}\)小于变换器开关频率\(f_{s}\)的大约10%。此外,电路设计人员还要注意,不要超过可用运算放大器的增益带宽限制。
因此,超前补偿器传递函数通常包含一个低频零点和几个高频极点。式(9.53)给出了一个包含单个高频极点的简化示例:
其如图9.28所示:
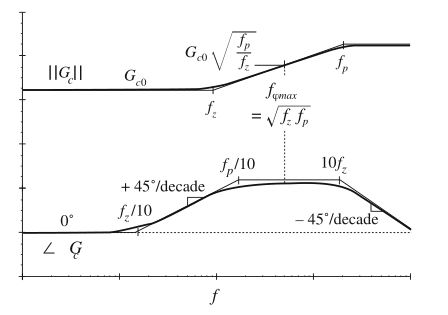
Fig. 9.28 Magnitude and phase asymptotes of the PD compensator transfer function Gcof Eq. (9.53)
最大相位出现在频率\(f_{\varphi max}\)处,这个频率由极点和零点的几何平均值给出:
为了获得最大的相位裕度改善,我们应该设计补偿器使得频率\(f_{\varphi max}\)与环路增益的穿越频率\(f_{c}\)一致。这个频率下的相位值为:
如图:
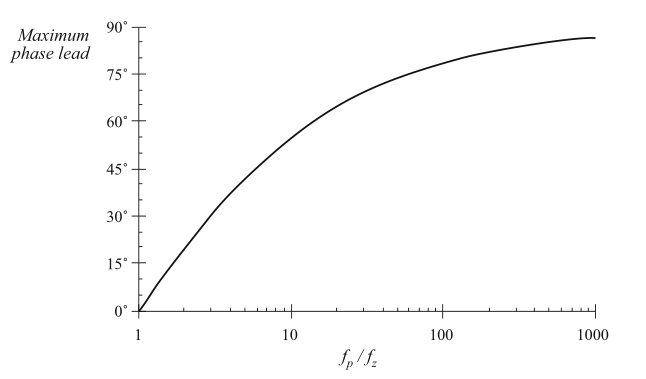
Fig. 9.29 Maximum phase lead θ vs. frequency ratio \(f_p/f_z\) for the lead compensator
这个方程被描绘在图9.29中。根据式(9.55)还可以得到:
其中\(\theta=\ang G_{c}(f_{\varphi max})\)。式(9.53)和(9.55)表明,为了最好的获得频率\(f_{c}\)处的补偿器的相位超前,应按如下所示选择极点频率和零点频率:
当我们希望避免改变穿越频率时,将补偿器增益的幅值在环路增益穿越频率\(f_{c}\)处设置为单位1。这就需要\(G_{c0}\)可以根据以下公式来确定:
可以看到,\(G_{c0}\)小于1,因此,超前补偿器降低了反馈环路的直流增益。当需要改变穿越频率\(f_{c}\)时,可以选择其他的\(G_{c0}\);例如,增大\(G_{c0}\)的值就使得穿越频率增加。如果频率\(f_{p}\)和\(f_{z}\)如式(9.57)所示选择,那么式(9.53)中的\(f_{\varphi max}\)将与新的穿越频率\(f_{c}\)保持一致。
图9.30给出了包含两极点典型环路增益的bode图。原始\(T(s)\)的相位裕度很小,因为穿越频率\(f_{c}\)实质上大于极点频率\(f_{0}\)。添加了补偿器后的结果也被描绘在了图中。该示例的超前补偿器的设计保持了相同的穿越频率,但改善了相位裕度。
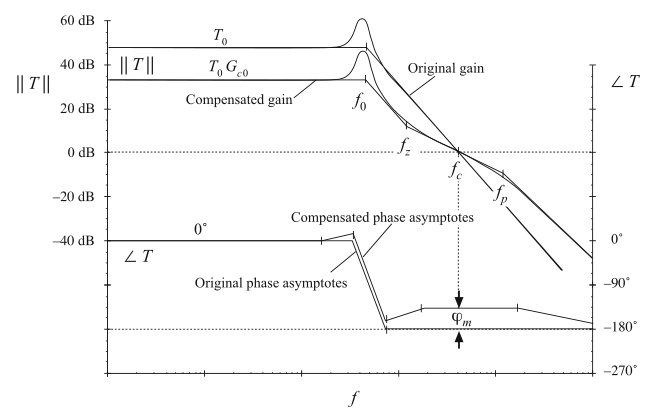
Fig. 9.30 Compensation of a loop gain containing two poles, using a lead (PD) compensator. The phase margin \(\varphi_m\) is improved
9.5.2 滞后补偿器(PI)
这种类型的补偿器通常用来增加低频环路增益,从而使直流以及远低于环路穿越频率的频率段更好的调节输出。正如式(9.59)和图9.31所示,在频率\(f_{L}\)处,将反转的零点添加到了环路增益中:
如果\(f_{L}\)远低于环路穿越频率\(f_{c}\),那么相位裕度不会被改变。这种补偿器也被称为比例-积分调节器,或者PI控制器。在低频时,反转的零点会使补偿器对误差信号进行积分。在一定程度上可以使补偿器增益在直流上任意大,那么直流环路增益也就会任意大。这使得误差信号的直流分量接近零。从而使得稳态输出电压得到很理想的调节,并且干扰到输出的传递函数在直流时接近零。在实际中,使用常规的运算放大器可以很容易实现式(9.59)所示的补偿器。
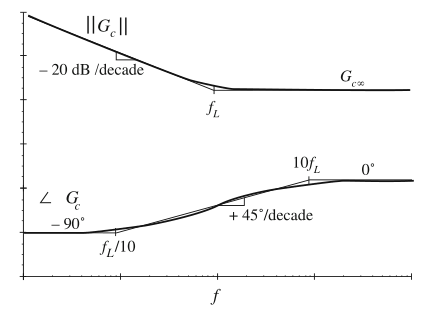
Fig. 9.31 Magnitude and phase asymptotes of the PI compensator transfer function Gc of Eq. (9.59)
尽管PI控制器几乎可以用于所有类型的反馈系统,但对于原系统包含单极点的系统而言,它是一种非常简单有效的方法。对于图9.32的示例,原始未补偿环路增益如下所示:
图为:
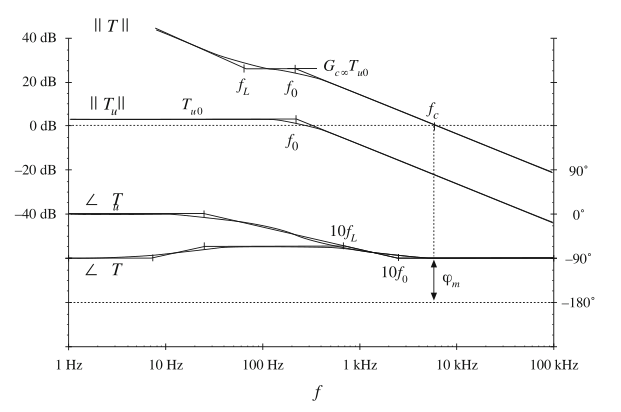
Fig. 9.32 Compensation of a loop gain containing a single pole, using a lag (PI) compensator. The loop gain magnitude is increased
当使用了式(9.59)的补偿器,那么补偿后的环路增益为\(T(s)=T_{u}(s)G_{c}(s)\)。图9.32同样给出了\(T(s)\)的幅值和相角渐近线。所期望的穿越频率\(f_{c}\)可以通过补偿器的高频增益\(G_{c \infty}\)来得到。如果在高频下用渐近线来近似环路增益,在高频下我们可以写出:
在穿越频率\(f=f_{c}\)处,环路增益的幅值为单位1。式(9.61)可以预测其穿越频率为:
因此,为获得期望的穿越频率\(f_{c}\),我们需要选择如下所示的补偿器增益\(G_{c \infty}\):
转折频率被选择为远小于\(f_{c}\),从而使得系统保持足够的相角裕度。
图9.33给出了\(1/(1+T(s))\)的幅值渐近线。在频率小于\(f_{L}\)时,PI控制器改善了对干扰的抑制。在直流处,\(G_{c}\)的幅值接近无穷,且\(1/(1+T)\)的幅值趋于0。因此,如式(9.51)和(9.52)所示的闭环扰动-输出传递函数在直流处趋向于0。
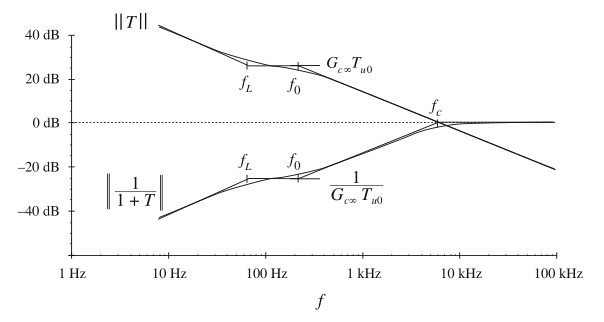
Fig. 9.33 Construction of \(||1/(1+T)||\), for the PI-compensated example of Fig.9.32
9.5.3 组合补偿器(PID)
可以结合超前和滞后补偿器的优点,从而来获得宽的带宽和零稳态误差。在低频下,补偿器对误差信号进行积分,从而获得较大的低频环路增益,并精确调节输出电压的低频分量。在高频段(穿越频率附近),补偿器将相位超前引入环路增益,从而改善了相位裕量。这种补偿器就叫做PID控制器。
图9.34给出了该补偿器实际典型版本的bode图。补偿器的传递函数为:
频率\(f_{L}\)处的反转零点与PI控制器以相同的方式起作用。像PD控制器一样,频率\(f_{z}\)上的零点在穿越频率附近使得相位超前。实际的补偿器中必须存在频率为\(f_{p1}\)和\(f_{p2}\)的高频极点,来使得增益在高频下被衰减,防止开关纹波干扰脉宽调制器的工作。环路增益必须选择为大于\(f_{L}\)和\(f_{z}\),并且小于\(f_{p1}\)和\(f_{p2}\)。
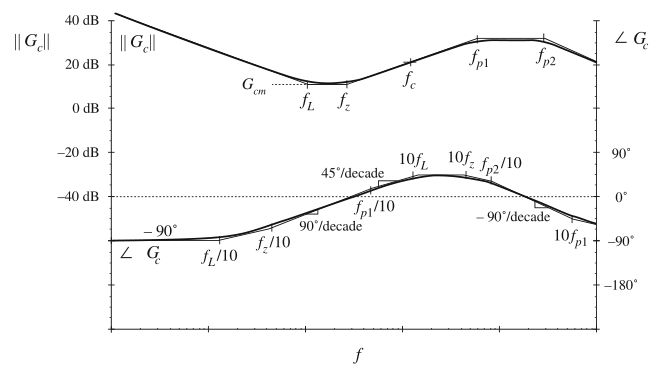
Fig. 9.34 Magnitude and phase asymptotes of the combined (PID) compensator transfer function Gc of Eq. (9.64)
9.5.4 设计实例
为了说明PI和PD补偿器的设计,让我们考虑图9.35所示的DC-DC Buck变换器的组合PID控制器的设计。该系统的额定输入电压\(v_{g}(t)\)为28 V。我们期望为15 V和5 A负载供电。这里我们以3 Ω电阻对负载进行建模。并且我们有一个精确的5 V电压作为参考。
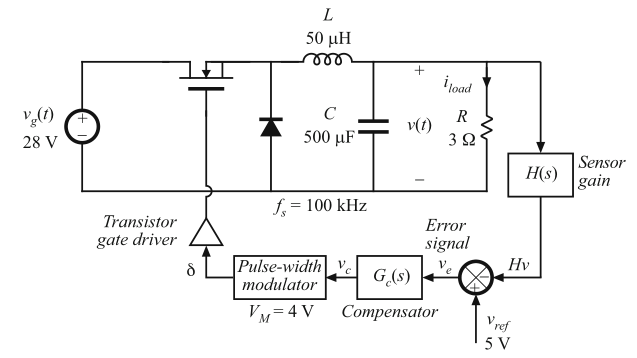
Fig. 9.35 Design example
第一步就是选择反馈增益\(H(s)\)。选择增益\(H\)来使得调节器产生稳定的15 V直流输出。让我们假设我们将成功设计出一个良好的反馈系统,使输出电压准确跟随参考电压。这就需要一个较大的环路增益来实现,那么就需要一个较小的误差电压:\(v_{e} \approx 0\)。因此,\(Hv \approx v_{ref}\),所以,我们选择:
静态占空比由变换器的稳态解给出:
控制电压的静态值\(V_{c}\)必须满足式(7.85),因此:
因此,系统的静态条件是已知的。但设计补偿器增益\(G_{c}(s)\)仍然是必要的。
控制系统的小信号交流模型如图9.36所示。Buck变换器的交流模型以规范模型形式表示。还对输入电压和负载电流中的扰动进行了建模。为通用起见,框图中还包含了参考电压的变化量\(\hat{v}_{ref}\);不过在直流稳压器中,这些变化量通常为0。
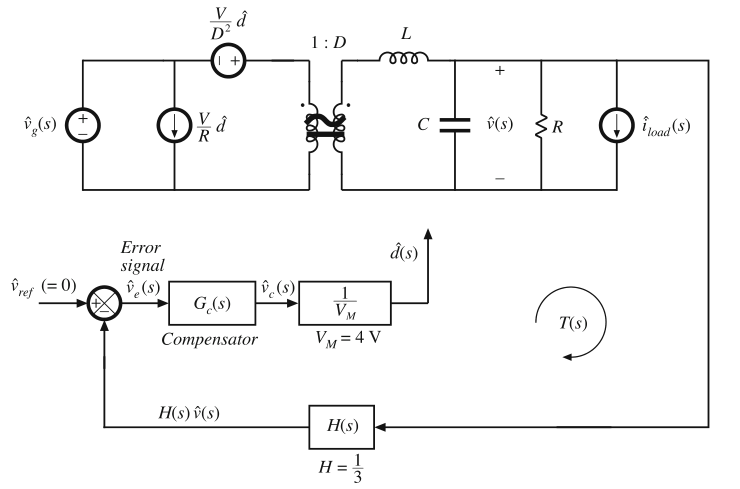
Fig. 9.36 System small-signal ac model, design example
前几章已经讨论了开环变换器的传递函数。开环控制-输出传递函数为:
开环控制-输出传递函数包含两个极点,并且可以用如下所示的归一化形式表示:
通过令式(9.68)和(9.69)中的系数相等,可以得到直流增益,转折频率以及\(Q\)系数为:
实际中,由于寄生参数的存在,如电容等效串联电阻(ESR),将观察到较低的\(Q\)系数。图9.37包含了\(G_{vd}(s)\)的bode图。
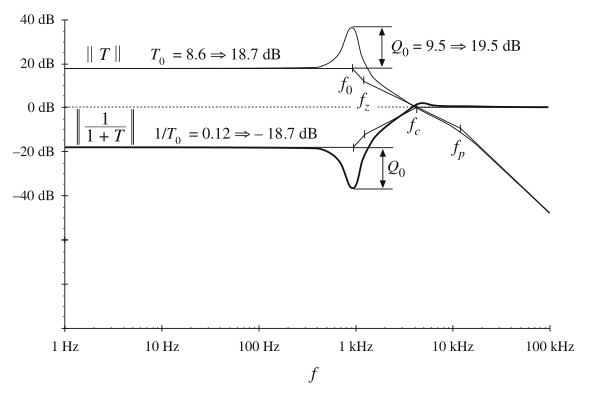
Fig. 9.37 Converter small-signal control-to-output transfer function \(G_{vd}\), design example
开环输入-输出传递函数为:
这个传递函数与\(G_{vd}(s)\)包含相同的极点,并且可以写为标准形式:
其中\(G_{g0}=D\)。Buck变换器的开环输出阻抗为:
用这些方程以框图形式来表示变换器,将产生图9.38的完整系统框图。系统环路增益为:
框图为:
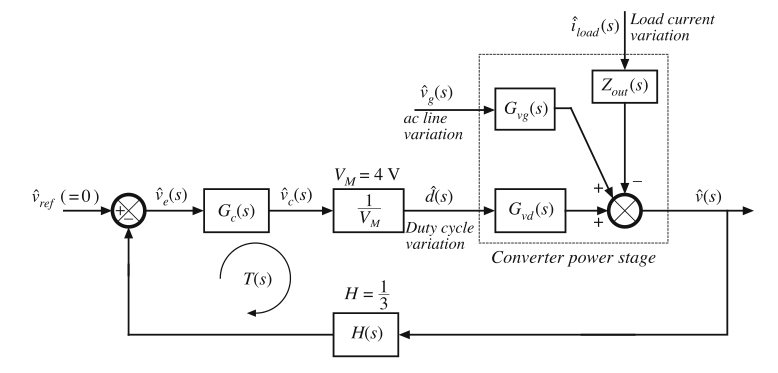
Fig. 9.38 System block diagram, design example
将式(9.69)代入式(9.74)可得:
闭环扰动-输出的传递函数已经由式(9.5)和(9.6)给出。图9.39描绘了具有单位增益补偿器的未补偿环路增益\(T_{u}(s)\)的bode图。那么式(9.75)可以被写为:
其中直流增益为:
bode图为:
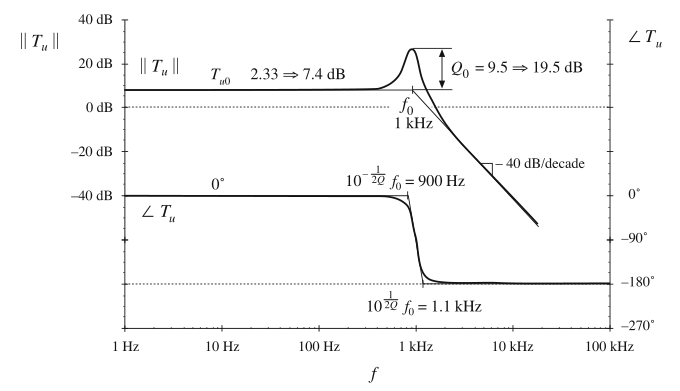
Fig. 9.39 Uncompensated loop gain \(T_u\), design example
未补偿的环路增益穿越频率约为1.8 kHz,相角裕度小于5°。
让我们来设计一个补偿器,使得穿越频率\(f_{c}=5khz\),或者开关频率的1/20。从图9.39中可以看出,未补偿环路增益在\(5kHz\)处近似为\(T_{u0}(f_{0}/f_{c})^2=0.093 \Rightarrow -20.6dB\)。因此,要在\(5kHz\)处获得单位环路增益,我们的补偿器在\(5kHz\)处应该具有增益为+20.6 dB。此外,\(5kHz\)处未补偿环路增益的相角接近-180°,因此,补偿器应改善相角裕度。因此,需要一个超前补偿器,PD控制器。让我们选择52°(任意的选取)相角裕度进行设计。根据图9.25,这个选择使得闭环极点的\(Q\)系数为1。图9.26的单位阶跃响应表现出16%的峰值过冲。在\(f_{c}=5\ kHz\)和\(\theta=52°\)的情况下对式(9.57)进行评估,就可以得到如下的补偿器极点和零点频率:
为了使补偿器在5 kHz增益为\(20.6\ dB \Rightarrow 10.7\),低频补偿增益必须为:
PD控制器幅值和相位的bode图如图9.40所示。
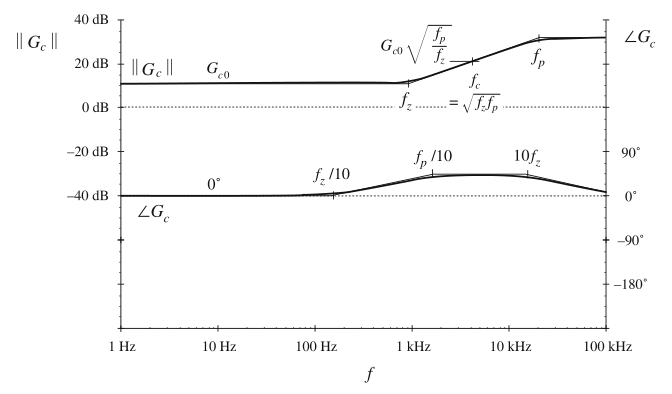
Fig. 9.40 PD compensator transfer function \(G_c\), design example
在采用了PD控制器后,环路增益为:
补偿后环路增益如图9.41所示。可以看到,从1.4 kHz到17 kHz的频率范围内,\(T(s)\)的相角裕度大约为52°。因此,使得穿越频率偏离5 kHz的因素值变化后对相角裕度的影响很小。此外,从图9.41中还可以看出,环路增益的直流幅值为\(T_{u0}G_{c0} \Rightarrow18.7\ dB\)。
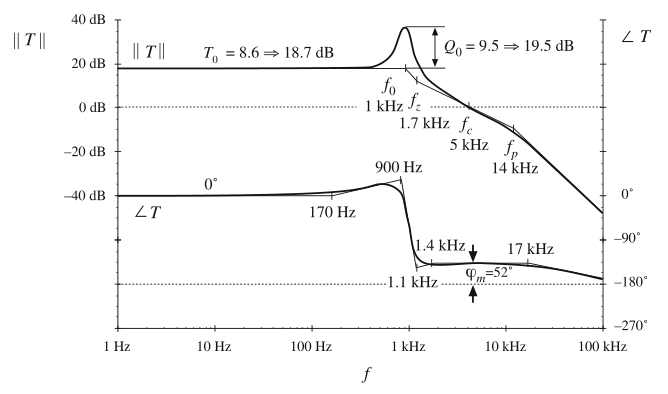
Fig. 9.41 The compensated loop gain of Eq. (9.80)
\(1/(1+T)\)的渐近线如图9.42所示。这个值的直流渐近线为-18.7 dB。因此,在频率小于1 kHz的范围内,反馈环路将输出电压扰动衰减18.7 dB。例如,假设输入电压\(v_{g}(t)\)包含幅值为1 V的 100 Hz变化的量。根据式(9.72),在没有反馈环路的情况下,这个扰动将根据式中开环传递函数\(G_{vg}(s)\)传播到输出。
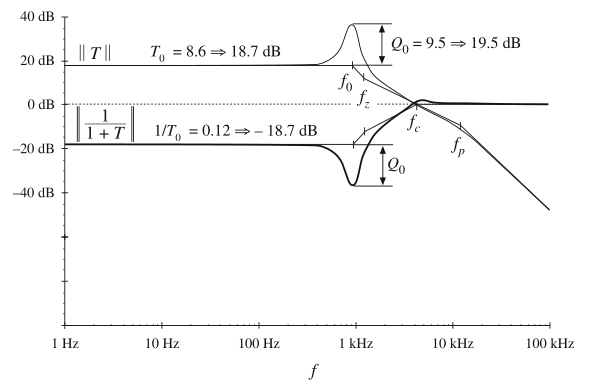
Fig. 9.42 Construction of \(1/(1 + T)\) for the PD-compensated design example of Fig.9.41
在100Hz处,该传递函数的增益基本等于直流渐近线\(D=0.536\)。因此,在没有反馈回路的情况下,在输出端将会观察到幅值为0.536 V的100 Hz变化电压。在反馈存在的情况下,式(9.5)的闭环输入-输出传递函数可以获得;在我们的示例中,这将100 Hz的变化衰减了\(18.7\ dB \Rightarrow8.6\)。现在100 Hz的输出电压变化幅值为\(0.536/8.6=0.062\ V\)。
正如9.5.2节所述,可以通过增加一个反转的零点来进一步改善低频调节特性。那么就可以得到9.5.3节中的PID控制器。补偿器传递函数变为:
这个补偿器增益的bode图如图9.43所示。由式(9.78)给出的零极点频率并未改变。并且选择中频增益\(G_{cm}\)与先前的式(9.79)中\(G_{c0}\)相同。因此,对于大于\(f_{L}\)的频率,环路增益的幅值不会被反转的零点改变。环路仍然表现出穿越频率为5 kHz。
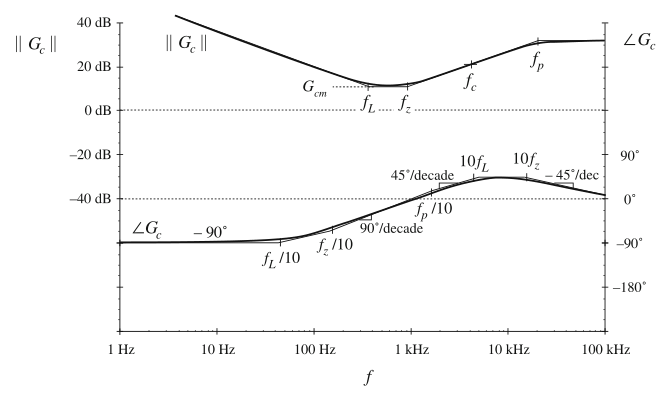
Fig. 9.43 PID compensator transfer function, Eq. (9.81)
为了使反转的零点不会明显降低相角裕度,让我们(任意选择)选择\(f_{L}\)为穿越频率的十分之一,即500 Hz。然后,反转的零点将增大低于500 Hz频率下的环路增益,从而改善输出电压的低频调节。从而图9.44的环路增益就可以得到。同时,还构造了\(1/(1+T)\)的幅值。可以看出,在500 Hz的反转零点处,\(1/(1+T)\)的幅值减小了大约\((100\ Hz)/(500\ Hz)=1/5\)。\(1/(1+T)\)在100 Hz处的总衰减为-32.7 dB。\(v_{g}(t)\)的1 V 100 Hz变化将在输出\(v(t)\)引起12 mV的变化。通过增加\(f_{L}\)可以获得进一步的改进;但是,这需要重新设计补偿器的PD部分来保持足够的相角裕度。
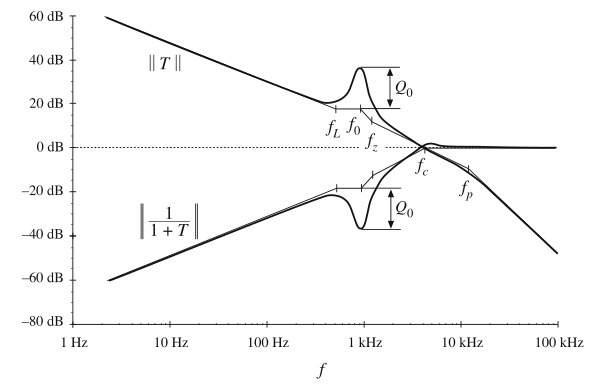
Fig. 9.44 Construction of \(||T||\)and \(||1/(1 + T)||\) with the PID compensator of Fig.9.43
输入-输出传递函数在图9.45中构造。式(9.72)的开环传递函数\(G_{vg}(s)\)和闭环传递函数\(G_{vg}(s)/(1+T(s))\)都使用了图形化代数方法进行构建。两个传递函数在大于穿越频率的部分重合。在小于穿越频率\(f_{c}\)处,闭环传递函数以系数\(T(s)\)衰减。可以看到,\(G_{vg}(s)\)的极点被\(1/(1+T)\)的零点抵消了。因此,闭环输入-输出传递函数近似为:
图为:
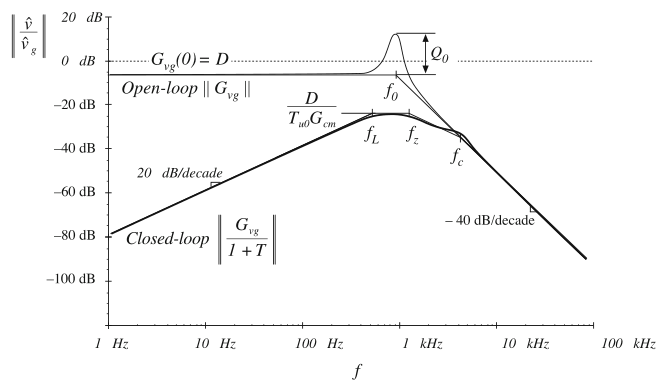
Fig. 9.45 Comparison of open-loop line-to-output transfer function \(G_{vg}\) and the closed-loop line-to-output transfer function of Eq. (9.82)
因此,图形化代数方法允许写出近似简单的干扰-输出闭环传递函数。有了这样的解析表达式,系统设计人员就可以轻松计算输出干扰,并且可以获得塑造环路增益\(T(s)\)所需的相关特性,从而满足系统要求。然后,可以使用计算机仿真来判断在所有工作条件下以及元件参数在预期范围内变化是否满足规格要求。本节中介绍的示例的计算机仿真结果可以在15.4.2节中找到。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号