[Fundamental of Power Electronics]-PART II-9. 控制器设计-9.3 关键项1/(1+T)和T/(1+T)以及闭环传递函数的构建
9.3 关键项\(1/(1+T)\)和\(T/(1+T)\)以及闭环传递函数的构建
从式(9.4)到(9.9)的传递函数可以很容易的由图形代数方法进行构建。假设我们已经分析了反馈系统模块,并且已经画出了\(||T(s)||\)的bode图。举一个具体的例子,假设结果为图9.5所示,其中\(T(s)\)为:
这个例子看起来有一点复杂,但实际的稳压器的环路增益通常甚至更加复杂,并且可能包含四个,五个甚至更多的极点。分析(9.5)到(9.7),要确定闭环传递函数,需要进行大量工作。环路增益必须要加1,并且重构所得的分子和分母。使用这种方法,很难获得对闭环传递函数和环路增益之间关系的物理本质了解。这样的结果就是,难以设计满足规格的反馈回路。
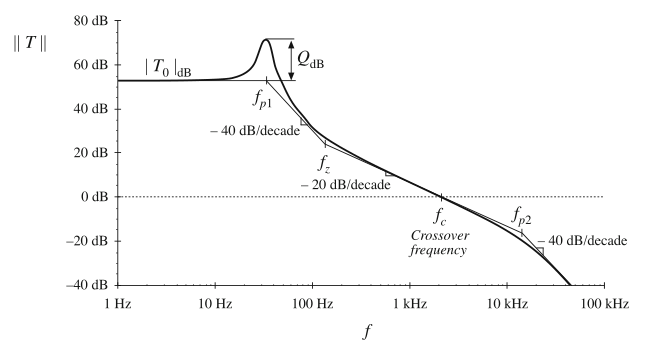
Fig. 9.5 Magnitude of the loop gain example, Eq. (9.10)
利用图形代数方法,闭环传递函数可以通过观察的方式构建,并且这些传递函数与环路增益的关系也变得显而易见了。让我们首先来研究如何画出\(||T/(1+T)||\)。从图9.5可以看到,存在被称为穿越频率(crossover frequency)的\(f_{c}\),使得\(||T||=1\)。在频率小于\(f_{c}\)时,\(||T||>1\);事实上,对于\(f<<f_{c}\)时,\(||T||>>1\)。因此,在低频处,\((1+T) \approx T\),并且\(T/(1+T) \approx T/T=1\)。在频率大于\(f_{c}\)处,\(||T||<1\),并且当\(f>>f_{c}\)时\(||T||<<1\)。因此,在高频处,\((1+T) \approx 1\)并且\(T/(1+T)\approx T/1=T\)。因此我们得到:
对应于式(9.11)的渐近线相对的就比较容易构建了。当\(f<f_{c}\)时,低频渐近线为1或者0 dB。\(f>f_{c}\)的高频渐近线为T。结果如图9.6所示。
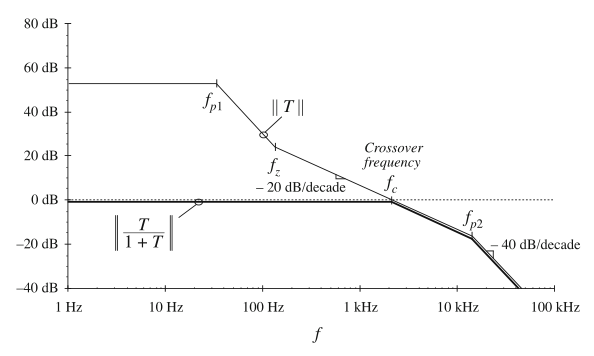
Fig. 9.6 Graphical construction of the asymptotes of \(||T/(1 + T)||\). Exact curves are omitted
因此,在低频段,\(||T||\)比较大,给定-输出传递函数为:
这是一个期望的特性,并且反馈环路在\(||T||\)比较大的频率下都能很好的工作。在高频段(\(f>>f_{c}\)),其中\(||T||\)很小,那么给定-输出传递函数为:
这并不是我们期望的特性,实际上,这是将反馈回路断开的增益(\(H \rightarrow 0\))。在高频段,由于\(T\)的带宽有限,因此反馈回路无法消除干扰。通过将图9.6中的\(T/(1+T)\)的渐近线乘以\(1/H\),就可以在图形上构建出给定-输出传递函数。
因此,穿越频率(crossover frequency)\(f_{c}\)代表了反馈系统的带宽,并且在该带宽内,闭环特性得以改善。进一步地,可以从图9.6中看出反馈使系统\(T\)的极点移动了:\(T\)在\(f_{p1}\)处包含两个极点,但\(T/(1+T)\)中并不存在,而\(T/(1+T)\)在\(f_{c}\)处包含一个极点。可以看出的是,\(T\)的一个极点从频率\(f_{p1}\)大致移动到了\(f_{z}\),这样二者抵消了。\(f_{p1}\)处的第二个极点从移动到了大约\(f_{c}\)处。图9.6表明了如何在反馈环路的带宽内增加极点的频率并改变其\(Q\)系数。
我们可以用同样的方式画出\(||1/(1+T)||\)的渐近线。在低频段,\(||T||>>1\),那么\((1+T) \approx T\),因此\(1/(1+T) \approx 1/T\)。在高频段,\(||T||<<1\),那么\((1+T) \approx 1\)并且\(1/(1+T) \approx 1\)。因此我们有:
以图9.5中的\(T(s)\)为例的渐近线在图9.7中给出。
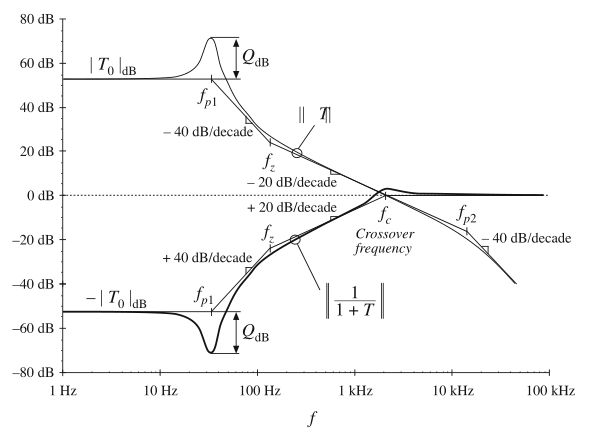
Fig. 9.7 Graphical construction of \(||1/(1 + T)||\)
在\(||T||\)很大的低频段,从\(v_{g}\)到\(v\)的扰动传递函数为:
同样的,\(G_{vg}(s)\)是不含反馈的原始传递函数。闭环传递函数幅值减小了系数\(1/||T||\)。因此,例如,如果我们想在120Hz,将传递函数缩小20倍,因此我们需要\(||T||\)在120Hz至少为\(20 \Rightarrow 26\ dB\)。通过将图9.7的渐近线乘以\(G_{vg}(s)\)的渐近线,可以在图形中构建\(v_{g}\)到\(v\)的传递函数。
类似的方法可以用于输出阻抗上。低频下的闭环输出阻抗为:
在小于穿越频率的频率段,输出阻抗的幅值在幅值上也减小系数为\(1/||T||\)。
在高频段\((f>f_{c})\)处,\(||T||\)很小,那么\(1/(1+T) \approx 1\),并且:
这与原始扰动传递函数和输出阻抗相同。因此,在高于穿越频率的频率段,反馈环路对扰动传递函数几乎没有影响。
图9.8a给出了一个具有由下式给出的环路增益\(T(s)\)的buck变换器的实例:
这个简单的示例没有包含补偿器。Buck变换器的LC滤波器在\(f=f_{p1}\)引入了谐振极点,并且电容等效串联电阻\(R_{C}\)在频率\(f_{z}\)处引入了一个极点。反馈传感器模块\(H(s)\)在\(f=f_{p2}\)处包含一个高频极点。因此,这个示例包含的环路增益\(T(s)\)与(9.10)相同。让我们假设我们的元件值选择使得其幅值如图9.5。因此,\(||1/(1+T)||\)在图9.7中给出了。
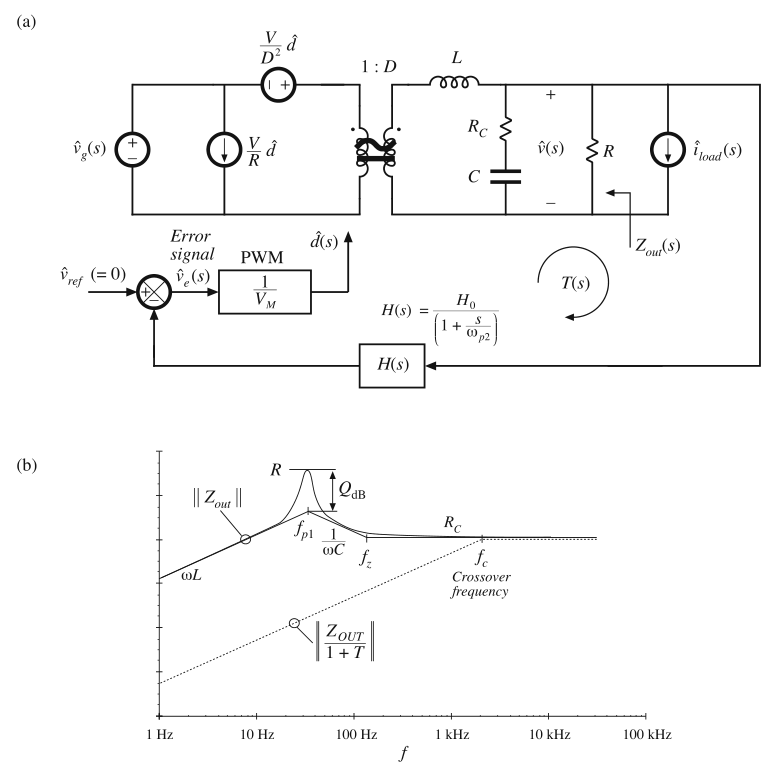
Fig. 9.8 Construction of the closed-loop output impedance of a simple buck regulator: (a) feedback
system, (b) open-loop (solid line) and closed-loop (dashed line) output impedance asymptotes
我们可以通过在图9.8a中将\(\hat{v}_{g}\)和\(\hat{d}\)设置为0,从而求解输出端口的阻抗,然后求解开环输出阻抗\(Z_{out}\)的bode图,其结果为:
对于\(R_{C}<<R\)的典型情况,开环输出阻抗的近似bode图在图9.8b中进行了构建。接下来,通过将图9.8b所示的开环输出阻抗乘以图9.7所示的\(||1/(1+T)||\)的渐近线来构成闭环输出阻抗。在大于穿越频率\(f_{c}\)的频率段,输出阻抗将不受反馈回路的影响。在刚好低于\(f_{c}\)的频率处,反馈环路减小了输出阻抗,并且\(||1/(1+T)||\)项为\(||Z_{out}/(1+T)||\)引入了\(+20\ dB\)每十倍频程的斜率。在\(f=f_{z}\)处,\(Z_{out}\)的零点被\(1/(1+T)\)的极点对消了,因此,在闭环传递函数中没有观察到斜率的变化。同样的,在\(f=f_{p1}\)处,\(Z_{out}\)的谐振极点被\(1/(1+T)\)的谐振零点对消了。那么对于\(||Z_{out}/(1+T)||\)的斜率来说,仍然没有什么变化。这些对消的发生时因为功率级电路将同样的极点引入了\(G_{vd}(s)\)和\(Z_{out}(s)\)中了。
本章后面将给出另外一个示例,其中反馈的补偿器电路将不存在于\(Z_{out}(s)\)的零极点引入了\(T(s)\)。结果闭环输出阻抗表现了由补偿器动态引入\(||1/(1+T)||\)的零极点特性。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号