强化学习基础:蒙特卡罗和时序差分
这篇文章承接文章强化学习基础:基本概念和动态规划,介绍另外两种解决强化学习问题的方法
求解方法:Monte Carlo
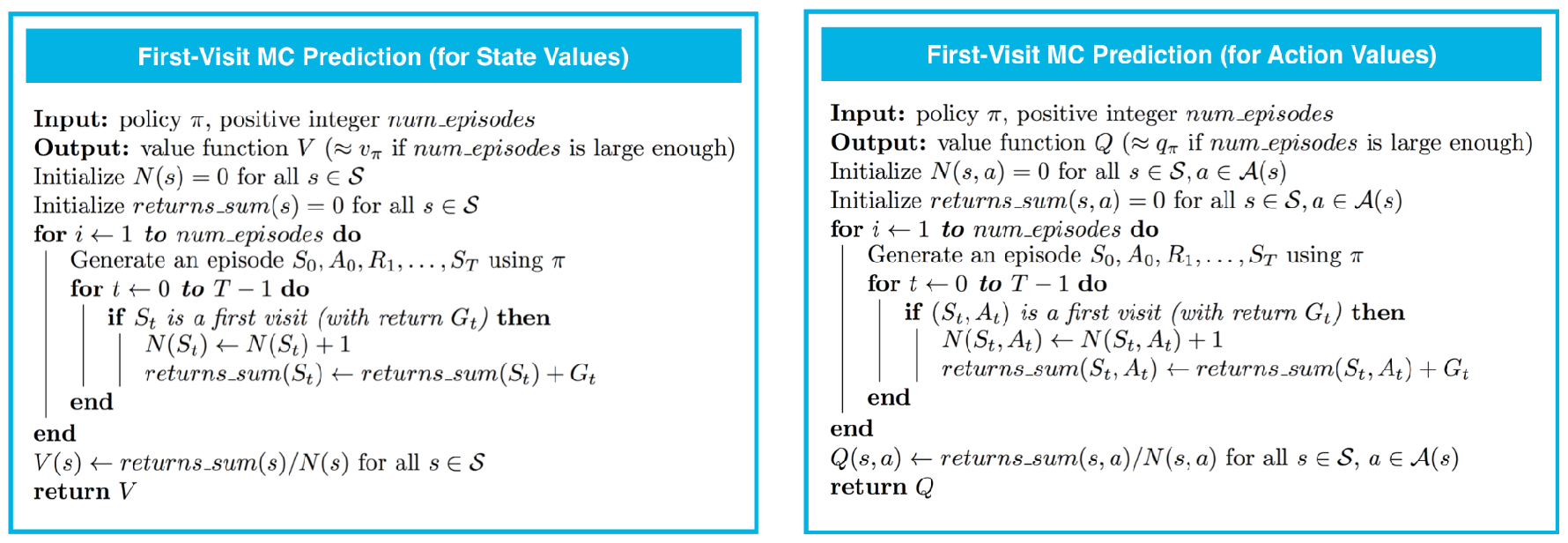
- 问题一(左图):estimate the state-value function $v_{\pi}$ corresponding to a policy $\pi$
- First-visit MC estimates $v_{\pi}(s)$ as the average of the returns following only first visits to $s$ (ignores returns that are associated to later visits)
- Every-visit MC estimates $v_{\pi}(s)$ as the average of the returns following all visits to $s$
- 问题二(右图):estimate the action-value function $q_{\pi}$ corresponding to a policy $\pi$
- First-visit MC estimates $q_{\pi}(s,a)$ as the average of the returns following only first visits to $s,a$
- Every-visit MC estimates $q_{\pi}(s,a)$ as the average of the returns following all visits to $s,a$
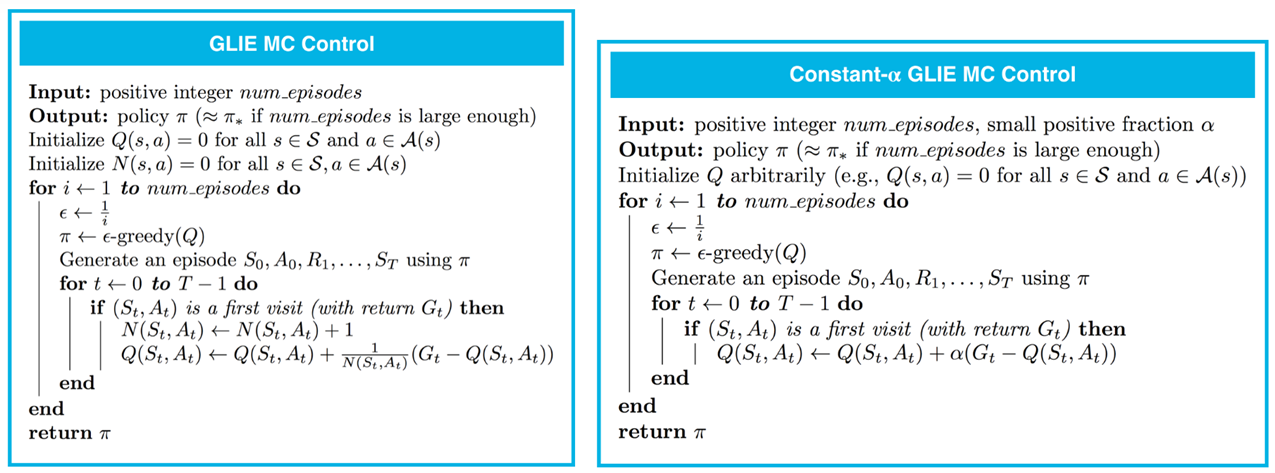
- 问题三(左图):get the optimal policy $\pi_*$
- relationship between the mean and individual return: $\bar{Q}_k=\frac{\sum_{i=1}^kG_i}{k}=\bar{Q}_{k-1}+\frac{1}{k}(G_k-\bar{Q}_{k-1})$
- $\epsilon$-greedy: Exploration vs Exploitation
- with probability $1-\epsilon$, select the greedy action ${\pi}(s)=\arg \max _{a \in \mathcal{A}(s)} Q(s, a)$ (Exploitation)
- with probability $\epsilon$, select an action (uniformly) at random ${\pi}(a|s)=\frac{1}{|\mathcal{A}(s)|}$ (Exploration)
- 问题四(右图):modify the algorithm to put more weights to the most recent returns
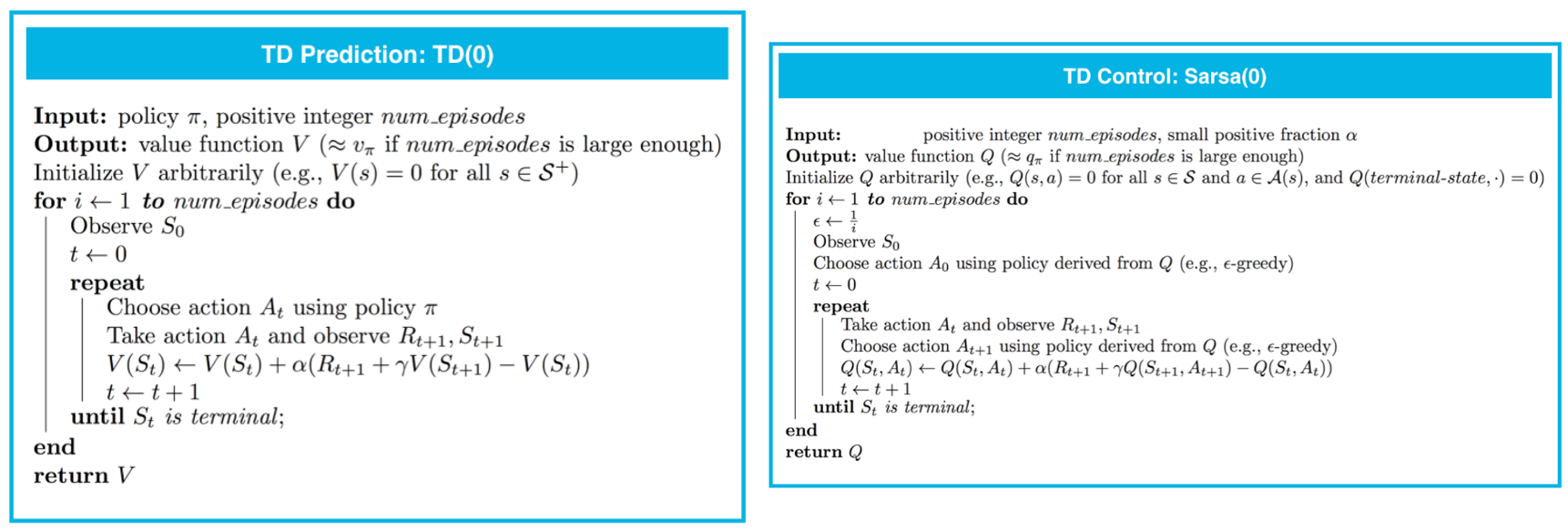
求解方法:Temporal Difference
Monte Carlo (MC) prediction methods must wait until the end of an episode to update the value function estimate, temporal-difference (TD) methods update the value function after every time step.
- 问题一(左图):estimate the state-value function $v_{\pi}$ (the estimation of $q_{\pi}$ is similar)
- 问题二(右图):get the optimal action value function $q_*$
- On policy: the agent interact with the environment by following the same policy $\pi$ that it seeks to evaluate (or improve)
- Sarsa(0) is an on-policy method
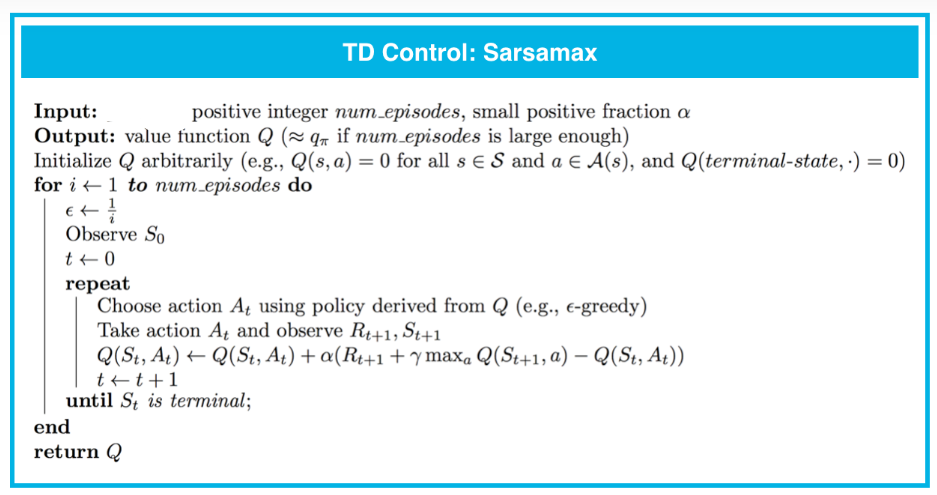
- 问题三:modified algorithm to get the optimal action value function $q_*$
- Off poliy: the agent interact with the environment by following a policy $b$ that is different from the policy $\pi$ that it seeks to evaluate (or improve)
- Sarsamax(i.e., Q-learning) is an off-policy method
- 问题四:another modified algorithm to get the optimal action value function $q_*$
- Expected Sarsa is an on-policy method
- $\pi(a|S_{t+1})$ is derived from $Q$ (e.g., $\epsilon$-greedy)



 浙公网安备 33010602011771号
浙公网安备 33010602011771号