2D KD-Tree实现
KD-tree
1.使用背景
在项目中遇到一个问题: 如何算一个点到一段折线的最近距离~折线的折点可能有上千个, 而需要检索的点可能出现上万的数据量, 的确是个值得思考的问题~
2.暴力解法
有个比较直观的方法: 计算点到折线的每段的距离, 然后暴力找出最短的那段~得到解..不过这种O(n)的复杂度方法显然遇到大数据量的时候会严重拖累服务器的性能.
3.K临近算法-数据结构
knn给了一个非常巧妙的启示用于求近似解, 可以通过2D-tree(k=2)得到.
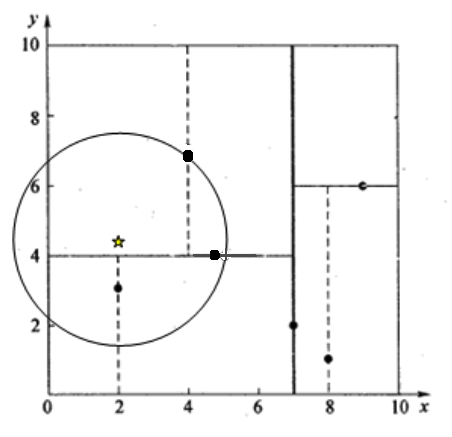
举一个稍微复杂的例子,我们来查找点(2,4.5),在(7,2)处测试到达(5,4),在(5,4)处测试到达(4,7),然后search_path中的结点为<(7,2), (5,4), (4,7)>,从search_path中取出(4,7)作为当前最佳结点nearest, dist为3.202;
然后回溯至(5,4),以(2,4.5)为圆心,以dist=3.202为半径画一个圆与超平面y=4相交,如下图,所以需要跳到(5,4)的左子空间去搜索。所以要将(2,3)加入到search_path中,现在search_path中的结点为<(7,2), (2, 3)>;另外,(5,4)与(2,4.5)的距离为3.04 < dist = 3.202,所以将(5,4)赋给nearest,并且dist=3.04。
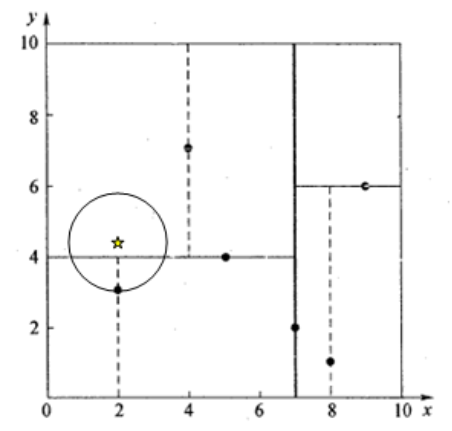
回溯至(2,3),(2,3)是叶子节点,直接平判断(2,3)是否离(2,4.5)更近,计算得到距离为1.5,所以nearest更新为(2,3),dist更新为(1.5)
回溯至(7,2),同理,以(2,4.5)为圆心,以dist=1.5为半径画一个圆并不和超平面x=7相交, 所以不用跳到结点(7,2)的右子空间去搜索。
至此,search_path为空,结束整个搜索,返回nearest(2,3)作为(2,4.5)的最近邻点,最近距离为1.5。
4.代码实现
KDTree.h
#define lson (rt << 1)//左节点 #define rson (rt << 1 | 1)//右节点 #include <vector> #include <algorithm> #include <cmath> const int N = 50005; const int k = 2; //2D-tree struct Node { float feature[2];//feature[0] = x, feature[1] = y static int idx; Node(float x0, float y0) { feature[0] = x0; feature[1] = y0; } bool operator < (const Node &u) const { return feature[idx] < u.feature[idx]; } //TOOD =hao Node() { feature[0] = 0; feature[0] = 0; } }; class KDTree { public: KDTree(); ~KDTree(); void clean(); int read_in(float* ary_x, float* ary_y, int len); void build(int l, int r, int rt, int dept); int find_nearest_point(float x, float y, Node& result, float& dist); float distance(const Node& x, const Node& y); private: void query(const Node& p, Node& res, float& dist, int rt, int dept); std::vector<Node> _data;//用vector模拟数组 std::vector<int> _flag;//判断是否存在 int _idx; std::vector<Node> _find_nth; };
KD-tree.cpp
#include "KDTree.h" int Node::idx = 0; KDTree::KDTree() { _data.reserve(N * 4); _flag.reserve(N * 4);//TODO init } KDTree::~KDTree() {} int KDTree::read_in(float* ary_x, float* ary_y, int len) { _find_nth.reserve(N * 4); for (int i = 0; i < len; ++i) { Node tmp(ary_x[i], ary_y[i]); _find_nth.push_back(Node(ary_x[i], ary_y[i])); } for (int i = 0; i < N * 4; ++i) { Node tmp; _data.push_back(tmp); _flag.push_back(0); } build(0, len - 1, 1, 0); return 0; } void KDTree::clean() { _find_nth.clear(); _data.clear(); _flag.clear(); } //建立kd-tree void KDTree::build(int l, int r, int rt, int dept) { if (l > r) return; _flag[rt] = 1; //表示标号为rt的节点存在 _flag[lson] = _flag[rson] = -1; //当前节点的孩子暂时标记不存在 int mid = (l + r + 1) >> 1; Node::idx = dept % k; //按照编号为idx的属性进行划分 std::nth_element(_find_nth.begin() + l, _find_nth.begin() + mid, _find_nth.begin() + r + 1); _data[rt] = _find_nth[mid]; build(l, mid - 1, lson, dept + 1); //递归左子树 build(mid + 1, r, rson, dept + 1); } int KDTree::find_nearest_point(float x, float y, Node &res, float& dist) { Node p(x, y); query(p, res, dist, 1, 0); return 0; } //查找kd-tree距离p最近的点 void KDTree::query(const Node& p, Node& res, float& dist, int rt, int dept) { if (_flag[rt] == -1) { return; }//不存在的节点不遍历 float tmp_dist = distance(_data[rt], p); bool fg = false; //用于标记是否需要遍历右子树 int dim = dept % k; //和建树一样, 保证相同节点的dim值不变 int x = lson; int y = rson; if (p.feature[dim] >= _data[rt].feature[dim]) { std::swap(x, y); //数据p的第dim个特征值大于等于当前的数据,则需要进入右子树 } if (~_flag[x]) { query(p, res, dist, x, dept + 1); //节点x存在, 则进入子树继续遍历 } if (tmp_dist < dist) { //如果找到更小的距离, 则替换目前的结果dist res = _data[rt]; dist = tmp_dist; } tmp_dist = (p.feature[dim] - _data[rt].feature[dim]) * (p.feature[dim] - _data[rt].feature[dim]); if (tmp_dist < dist) { //还需要继续回溯 fg = true; } if (~_flag[y] && fg) { query(p, res, dist, y, dept + 1); } } //计算两点间的距离的平方 float KDTree::distance(const Node& x, const Node& y) { float res = 0; for (int i = 0; i < k; i++) { res += (x.feature[i] - y.feature[i]) * (x.feature[i] - y.feature[i]); } return res; }
自测暂无发现bug~
参考文章:
(http://blog.csdn.net/acdreamers/article/details/44664645/ “KD-tree实现”)
(http://blog.csdn.net/silangquan/article/details/41483689/ “详解KD-tree”)
感谢巨巨们的分享

 浙公网安备 33010602011771号
浙公网安备 33010602011771号