特征值和特征向量
1 基本定义
设 A 为 n 阶方阵,若存在数 λ 和非零向量 x,使得:
![]()
则称 λ 是 A 的一个特征值,x 为 A 的对应于特征值 λ 的特征向量。
先有一个直观的印象:可以把矩阵看做是运动,特征值就是运动的速度,特征向量就是运动的方向。
注意,由于矩阵是数学概念,非常抽象,所以上面所谓的运动、运动的速度、运动的方向都是广义的,在现实不同的应用中有不同的指代。
2 几何意义
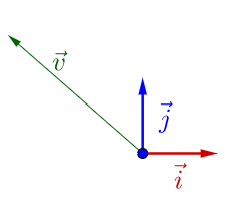
因为线性变换总是在各种基之间变来变去,所以下面都会把作图所用的基和原点给画出来。
在%22%20aria-hidden%3D%22true%22%3E%0A%3Cg%20class%3D%22mjx-svg-mrow%22%3E%0A%3Cg%20class%3D%22mjx-svg-texatom%22%3E%0A%3Cg%20class%3D%22mjx-svg-mrow%22%3E%0A%3Cg%20class%3D%22mjx-svg-munderover%22%3E%0A%3Cg%20class%3D%22mjx-svg-msubsup%22%20transform%3D%22translate(327%2C0)%22%3E%0A%3Cg%20class%3D%22mjx-svg-mi%22%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMATHI-69%22%3E%3C%2Fuse%3E%0A%3C%2Fg%3E%0A%3C%2Fg%3E%0A%3Cg%20class%3D%22mjx-svg-mo%22%20transform%3D%22translate(0%2C781)%22%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMAIN-2192%22%3E%3C%2Fuse%3E%0A%3C%2Fg%3E%0A%3C%2Fg%3E%0A%3C%2Fg%3E%0A%3C%2Fg%3E%0A%3Cg%20class%3D%22mjx-svg-mo%22%20transform%3D%22translate(1000%2C0)%22%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMAIN-2C%22%3E%3C%2Fuse%3E%0A%3C%2Fg%3E%0A%3Cg%20class%3D%22mjx-svg-texatom%22%20transform%3D%22translate(1445%2C0)%22%3E%0A%3Cg%20class%3D%22mjx-svg-mrow%22%3E%0A%3Cg%20class%3D%22mjx-svg-munderover%22%3E%0A%3Cg%20class%3D%22mjx-svg-msubsup%22%20transform%3D%22translate(294%2C0)%22%3E%0A%3Cg%20class%3D%22mjx-svg-mi%22%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMATHI-6A%22%3E%3C%2Fuse%3E%0A%3C%2Fg%3E%0A%3C%2Fg%3E%0A%3Cg%20class%3D%22mjx-svg-mo%22%20transform%3D%22translate(0%2C781)%22%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMAIN-2192%22%3E%3C%2Fuse%3E%0A%3C%2Fg%3E%0A%3C%2Fg%3E%0A%3C%2Fg%3E%0A%3C%2Fg%3E%0A%3C%2Fg%3E%0A%3C%2Fg%3E%0A%3C%2Fsvg%3E) 下面有个
下面有个%22%20aria-hidden%3D%22true%22%3E%0A%3Cg%20class%3D%22mjx-svg-mrow%22%3E%0A%3Cg%20class%3D%22mjx-svg-texatom%22%3E%0A%3Cg%20class%3D%22mjx-svg-mrow%22%3E%0A%3Cg%20class%3D%22mjx-svg-munderover%22%3E%0A%3Cg%20class%3D%22mjx-svg-msubsup%22%20transform%3D%22translate(257%2C0)%22%3E%0A%3Cg%20class%3D%22mjx-svg-mi%22%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMATHI-76%22%3E%3C%2Fuse%3E%0A%3C%2Fg%3E%0A%3C%2Fg%3E%0A%3Cg%20class%3D%22mjx-svg-mo%22%20transform%3D%22translate(0%2C563)%22%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMAIN-2192%22%3E%3C%2Fuse%3E%0A%3C%2Fg%3E%0A%3C%2Fg%3E%0A%3C%2Fg%3E%0A%3C%2Fg%3E%0A%3C%2Fg%3E%0A%3C%2Fg%3E%0A%3C%2Fsvg%3E) :
:
随便左乘一个矩阵 A,图像看上去没有什么特殊的:

调整下的方向,图像看上去有点特殊了:
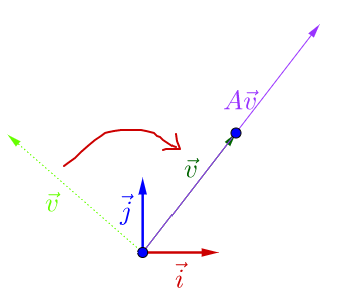
可以观察到,调整后的 和 %22%20aria-hidden%3D%22true%22%3E%0A%3Cg%20class%3D%22mjx-svg-mrow%22%3E%0A%3Cg%20class%3D%22mjx-svg-mi%22%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMATHI-41%22%3E%3C%2Fuse%3E%0A%3C%2Fg%3E%0A%3Cg%20class%3D%22mjx-svg-texatom%22%20transform%3D%22translate(750%2C0)%22%3E%0A%3Cg%20class%3D%22mjx-svg-mrow%22%3E%0A%3Cg%20class%3D%22mjx-svg-munderover%22%3E%0A%3Cg%20class%3D%22mjx-svg-msubsup%22%20transform%3D%22translate(257%2C0)%22%3E%0A%3Cg%20class%3D%22mjx-svg-mi%22%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMATHI-76%22%3E%3C%2Fuse%3E%0A%3C%2Fg%3E%0A%3C%2Fg%3E%0A%3Cg%20class%3D%22mjx-svg-mo%22%20transform%3D%22translate(0%2C563)%22%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMAIN-2192%22%3E%3C%2Fuse%3E%0A%3C%2Fg%3E%0A%3C%2Fg%3E%0A%3C%2Fg%3E%0A%3C%2Fg%3E%0A%3C%2Fg%3E%0A%3C%2Fg%3E%0A%3C%2Fsvg%3E) 在同一根直线上,只是 的长度相对 的长度变长了。
在同一根直线上,只是 的长度相对 的长度变长了。
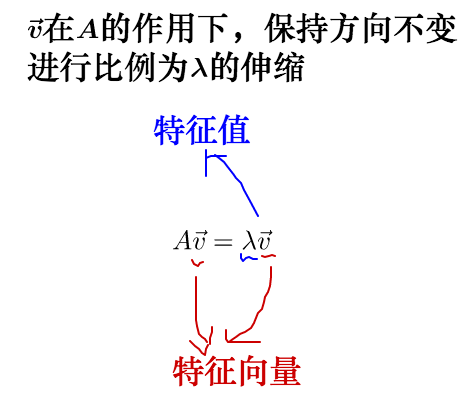
此时,我们就称 是 %22%20aria-hidden%3D%22true%22%3E%0A%3Cg%20class%3D%22mjx-svg-mrow%22%3E%0A%3Cg%20class%3D%22mjx-svg-mi%22%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMATHI-41%22%3E%3C%2Fuse%3E%0A%3C%2Fg%3E%0A%3C%2Fg%3E%0A%3C%2Fg%3E%0A%3C%2Fsvg%3E) 的特征向量,而 的长度是的长度的
的特征向量,而 的长度是的长度的 %22%20aria-hidden%3D%22true%22%3E%0A%3Cg%20class%3D%22mjx-svg-mrow%22%3E%0A%3Cg%20class%3D%22mjx-svg-mi%22%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMATHI-3BB%22%3E%3C%2Fuse%3E%0A%3C%2Fg%3E%0A%3C%2Fg%3E%0A%3C%2Fg%3E%0A%3C%2Fsvg%3E) 倍, 就是特征值。
倍, 就是特征值。
从而,特征值与特征向量的定义式就是这样的:
其实之前的 A 不止一个特征向量,还有一个特征向量:

容易从相对于是变长了还是缩短看出,这两个特征向量对应的特征 值,一个大于1,一个小于1。
从特征向量和特征值的定义式还可以看出,特征向量所在直线上的向量都是特征向量:

可以尝试改变 的位置,以及矩阵 A 的值 (特征空间会随着矩阵改变而改变) 。有些值构成的矩阵没有画出特征空间,可能是因为它的特征值、特征向量是复数,也可能是不存在。
运动需要附加到具体的事物上才能观察,要观察矩阵所代表的运动,需要把它附加到向量上,可以把二维向量可以看作平面上的一个点:

似乎还看不出什么。但是如果反复运用矩阵乘法的话:
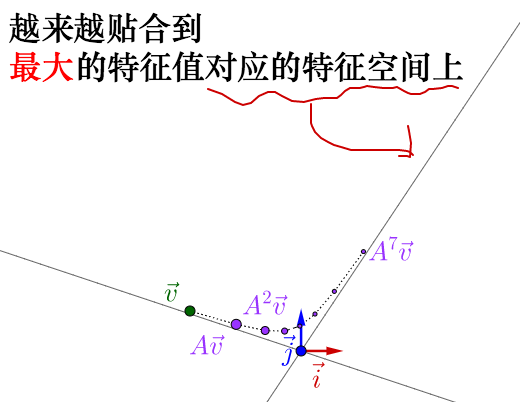
反复运用矩阵乘法,矩阵所代表的运动的最明显的特征,即速度最大的方向,就由最大特征值对应的特征向量展现了出来。顺便说下,对于复数的特征值、特征向量可以观察到反复运用矩阵乘法的结果是围绕着原点在旋转,这里就不展开来说了。
3 相似矩阵
相似矩阵的定义是:设 A,B 都是 n 阶矩阵,若有可逆矩阵 P,使 P-1AP = B ,则称 B 是 A 的相似矩阵,或说 A 和 B 相似。
这部分内容会涉及到矩阵乘法的知识,可以参考:如何理解矩阵乘法。可以了解到,矩阵是一种线性变换函数,这种线性变换是通过指定基下的矩阵 A 来表示的。
相似矩阵就是,同一个线性变换,不同基下的矩阵。
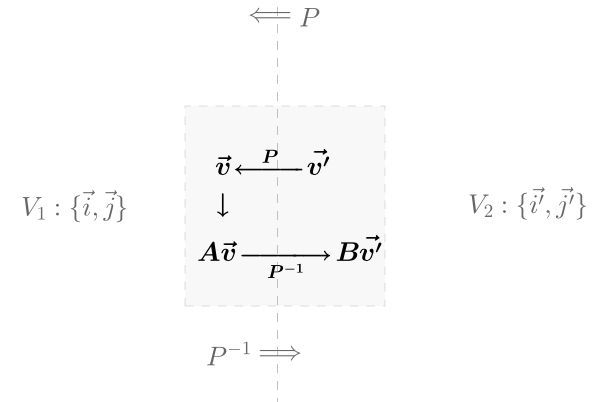
先上一张图,说明不同基下的矩阵的变换思路:
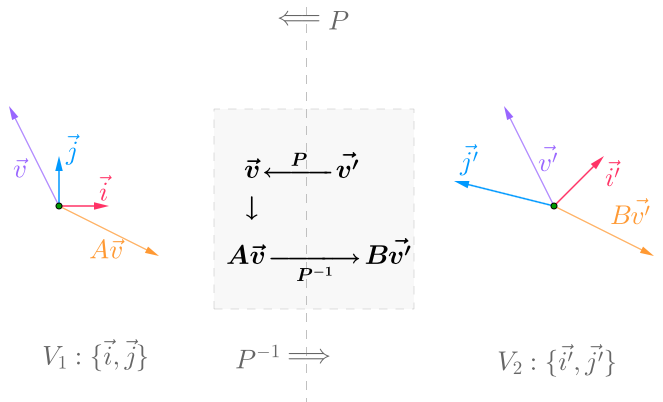
其中有两个基:V1 和 V2。V1 → V2,可以通过 P-1 转换;V2 → V1,可以通过 P 转换。
整个转换的核心,就是上图正中的文字:
%22%20aria-hidden%3D%22true%22%3E%0A%3Cg%20transform%3D%22translate(110%2C0)%22%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMATHI-76%22%20x%3D%220%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20transform%3D%22scale(0.707)%22%20xlink%3Ahref%3D%22%23E1-MJMAIN-2032%22%20x%3D%22686%22%20y%3D%22583%22%3E%3C%2Fuse%3E%0A%3C%2Fg%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMAIN-2192%22%20x%3D%220%22%20y%3D%22929%22%3E%3C%2Fuse%3E%0A%3C%2Fg%3E%0A%3C%2Fsvg%3E) 是 V2 下的点,通过 P 变为 V1 下的点,即
是 V2 下的点,通过 P 变为 V1 下的点,即 %22%20aria-hidden%3D%22true%22%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMATHI-50%22%20x%3D%220%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%3Cg%20transform%3D%22translate(751%2C0)%22%3E%0A%3Cg%20transform%3D%22translate(110%2C0)%22%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMATHI-76%22%20x%3D%220%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20transform%3D%22scale(0.707)%22%20xlink%3Ahref%3D%22%23E1-MJMAIN-2032%22%20x%3D%22686%22%20y%3D%22583%22%3E%3C%2Fuse%3E%0A%3C%2Fg%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMAIN-2192%22%20x%3D%220%22%20y%3D%22929%22%3E%3C%2Fuse%3E%0A%3C%2Fg%3E%0A%3C%2Fg%3E%0A%3C%2Fsvg%3E) ;在 V1 下,通过 A 矩阵完成线性变换,即
;在 V1 下,通过 A 矩阵完成线性变换,即%22%20aria-hidden%3D%22true%22%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMATHI-41%22%20x%3D%220%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMATHI-50%22%20x%3D%22750%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%3Cg%20transform%3D%22translate(1502%2C0)%22%3E%0A%3Cg%20transform%3D%22translate(110%2C0)%22%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMATHI-76%22%20x%3D%220%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20transform%3D%22scale(0.707)%22%20xlink%3Ahref%3D%22%23E1-MJMAIN-2032%22%20x%3D%22686%22%20y%3D%22583%22%3E%3C%2Fuse%3E%0A%3C%2Fg%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMAIN-2192%22%20x%3D%220%22%20y%3D%22929%22%3E%3C%2Fuse%3E%0A%3C%2Fg%3E%0A%3C%2Fg%3E%0A%3C%2Fsvg%3E) ,通过 P-1 从变回 V2 下的点,即
,通过 P-1 从变回 V2 下的点,即 %22%20aria-hidden%3D%22true%22%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMATHI-50%22%20x%3D%220%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%3Cg%20transform%3D%22translate(784%2C412)%22%3E%0A%20%3Cuse%20transform%3D%22scale(0.707)%22%20xlink%3Ahref%3D%22%23E1-MJMAIN-2212%22%20x%3D%220%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20transform%3D%22scale(0.707)%22%20xlink%3Ahref%3D%22%23E1-MJMAIN-31%22%20x%3D%22778%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%3C%2Fg%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMATHI-41%22%20x%3D%221788%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMATHI-50%22%20x%3D%222539%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%3Cg%20transform%3D%22translate(3290%2C0)%22%3E%0A%3Cg%20transform%3D%22translate(110%2C0)%22%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMATHI-76%22%20x%3D%220%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20transform%3D%22scale(0.707)%22%20xlink%3Ahref%3D%22%23E1-MJMAIN-2032%22%20x%3D%22686%22%20y%3D%22583%22%3E%3C%2Fuse%3E%0A%3C%2Fg%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMAIN-2192%22%20x%3D%220%22%20y%3D%22929%22%3E%3C%2Fuse%3E%0A%3C%2Fg%3E%0A%3C%2Fg%3E%0A%3C%2Fsvg%3E) 。
。
综上,我们有:
![]()
可以认为:
![]()
那么 B 和 A 互为相似矩阵。
为什么我们需要相似矩阵呢?比如这个 A 矩阵:

可以这样分解:
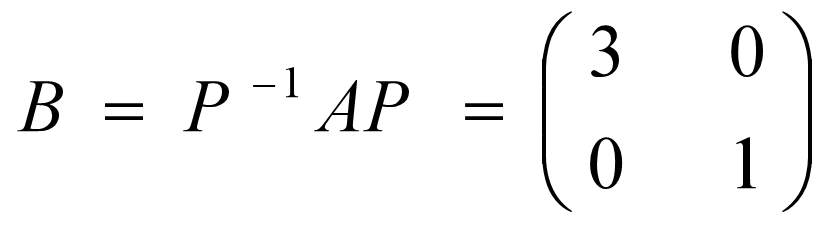

B 就是对角矩阵,看上去就很清爽,所以说相似变换就是坐标转换,转换到一个更方便计算的简单坐标系。
4 特征值分解
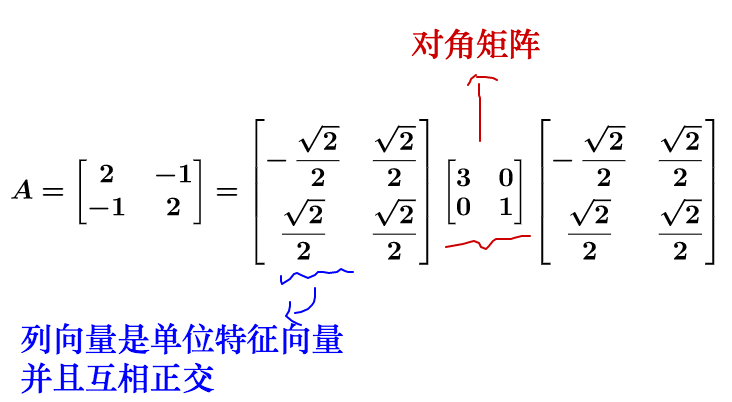
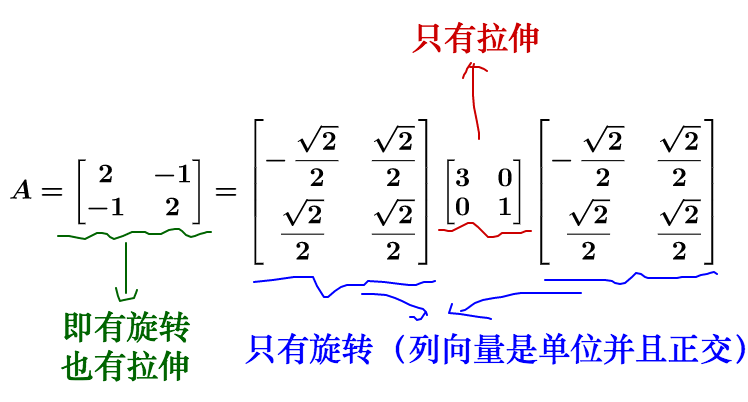
我们知道,对于矩阵 A 可以对角化的话,可以通过相似矩阵进行下面这样的特征值分解:
![]()
其中 Λ 为对角阵,P 的列向量是单位化的特征向量。(可以用定义推导出来)
拿个具体的例子来讲:
对于方阵而言,矩阵不会进行纬度的升降,所以矩阵代表的运动实际上只有两种:旋转和拉伸。最后的运动结果就是这两种的合成。
我们再回头看下刚才的特征值分解,实际上把运动给分解开了:
我们来看看在几何上的表现是什么,因此相似矩阵的讲解涉及到基的变换,所以大家注意观察基:

左乘 P :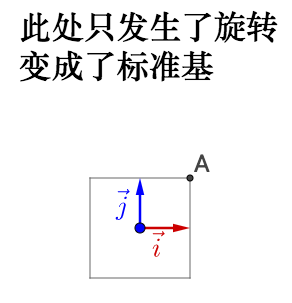
如果旋转前的基不正交,旋转之后变为了标准基,那么实际会产生伸缩,所以之前说的正交很重要。
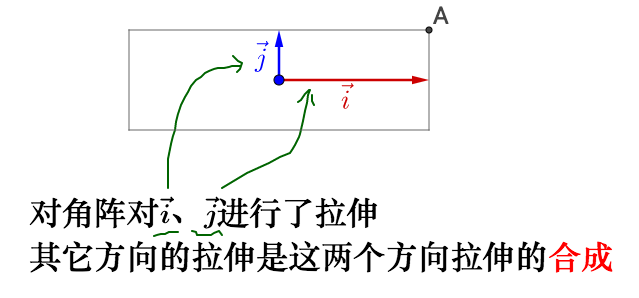
继续左乘对角矩阵 Λ :
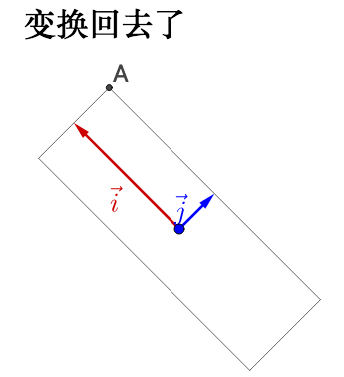
左乘 P-1 :
- 特征值就是拉伸的大小
- 特征向量指明了拉伸的方向
回到我们之前说的运动上去,特征值就是运动的速度,特征向量就是运动的方向,而其余方向的运动就由特征向量方向的运动合成。所以最大的特征值对应的特征向量指明了运动速度的最大方向。
但是,重申一下,上面的推论有一个重要的条件,特征向量正交,这样变换后才能保证变换最大的方向在基方向。如果特征向量不正交就有可能不是变化最大的方向。所以我们在实际应用中,都要去找正交基。但是特征向量很可能不是正交的,那么我们就需要奇异值分解了,这里就不展开了。
5 应用
图片压缩:例如,有下面这么一副 512 × 512 的图片 (方阵才有特征值,所以找了张正方形的图) :

这个图片可以放到一个矩阵里面去,就是把每个像素的颜色值填入到一个 512 × 512 的 A 矩阵中。
根据之前描述的有:
![]()
其中,Λ 是对角阵,对角线上是从大到小排列的特征值。
我们在 Λ 中只保留前面50个的特征值 (也就是最大的50个,其实也只占了所有特征值的百分之十) ,其它的都填0,重新计算矩阵后,恢复为下面这样的图像:

效果还可以,其实一两百个特征值之和可能就占了所有特征值和的百分之九十了,其他的特征值都可以丢弃了。
主要参考:如何理解相似矩阵?、如何理解矩阵特征值和特征向量?

 浙公网安备 33010602011771号
浙公网安备 33010602011771号