多智能体城市交通计算综合应用
城市交通信号控制的综合应用计算框架
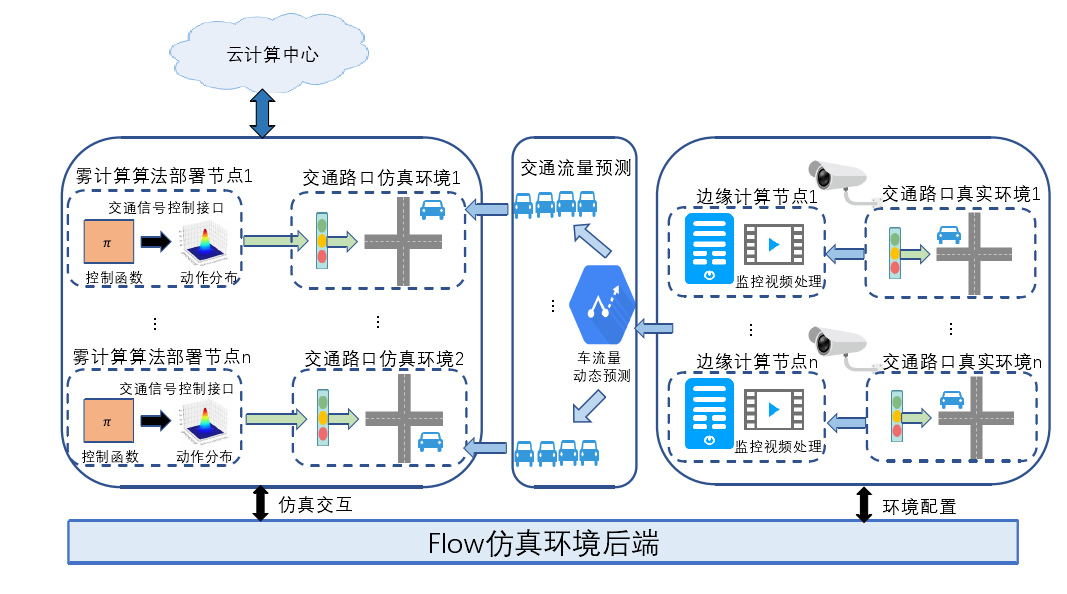
- 构建混合计算框架
- 构建城市交通真实环境
- 构建城市交通仿真环境
城市多交叉路口交通信号控制组合算法
-
算法背景
现存研究存在以下不足:
(1) 现有的交通仿真环境无法模拟更加接近真实的交通环境,导致城市交通信号仿真控制效果和实际路测效果具有一定差距,不能完全体现真实城市交通的运行状况;
(2) 针对多路口交通信号控制优化 MARL 模型算法本身的控制效果并不是非常理想,博弈论、通信理论和 MARL 的组合研究不够深入,算法本身具备提升空间;
(3) 对于城市交信号控制 MARL 算法在城市多个路口的工业级部署研究还不足;
(4)现今绝大多数城市的交通信号控制仍然沿用上世纪 50、60 年代的控制技术,智能交通信号控制应用落地仍然具有广阔的前景。
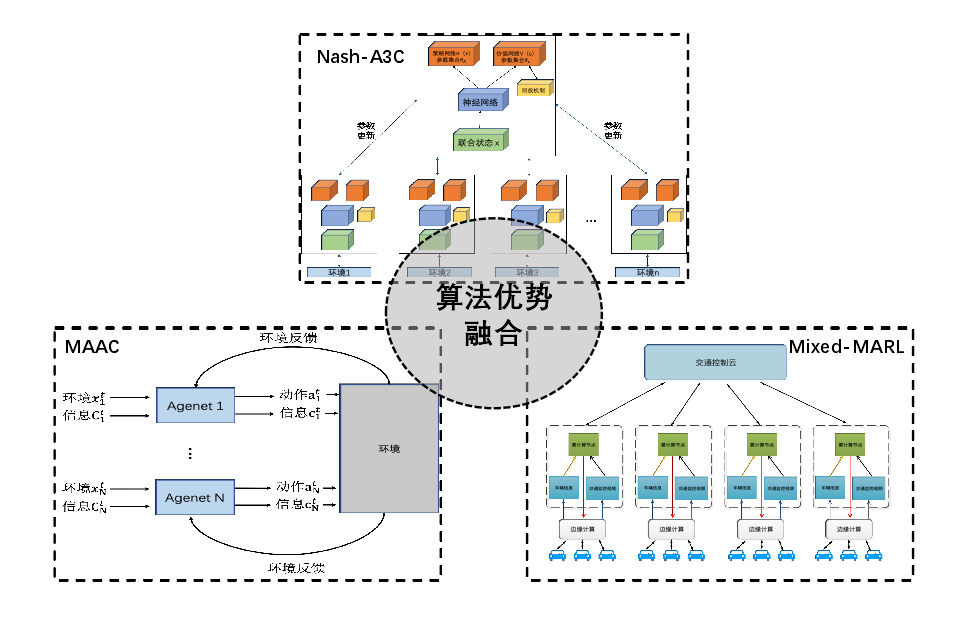
Nash-A2C、Nash-A3C、MAAC 算法优势在于理论和MARL 算法的优化,Mixed-MARL 优势在于考虑混合架构部署和网络时延。
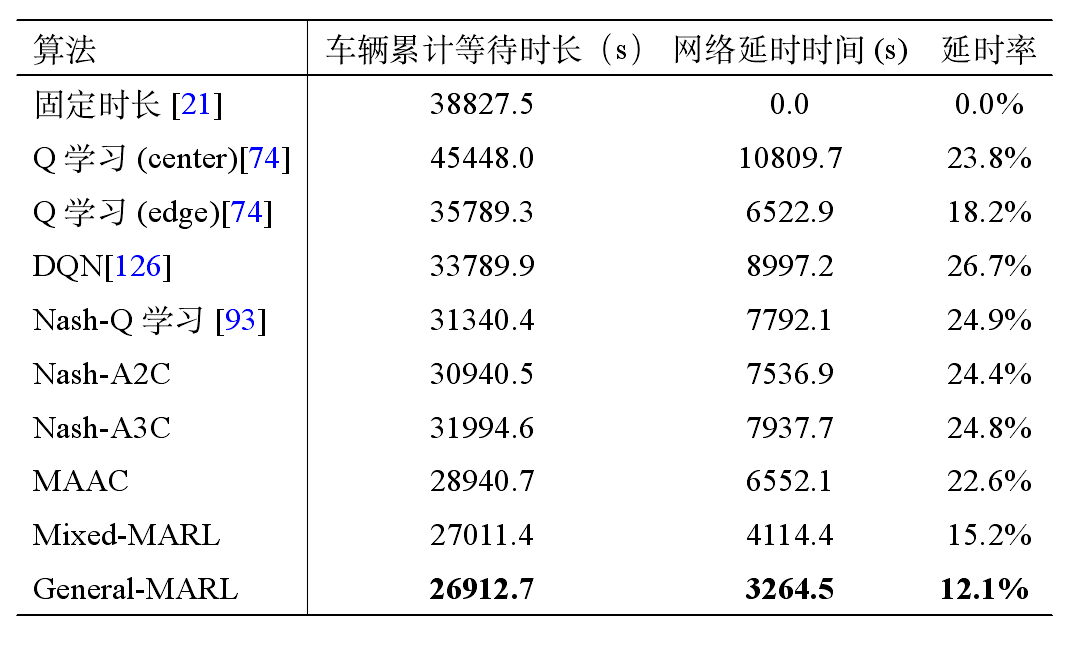
Nash-A3C 的实验结果表现在不考虑网络延时的情况下最为出色;在考虑网络带宽和网络时延的情况下,Mixed-MARL 的实验表现最佳。
-
算法过程
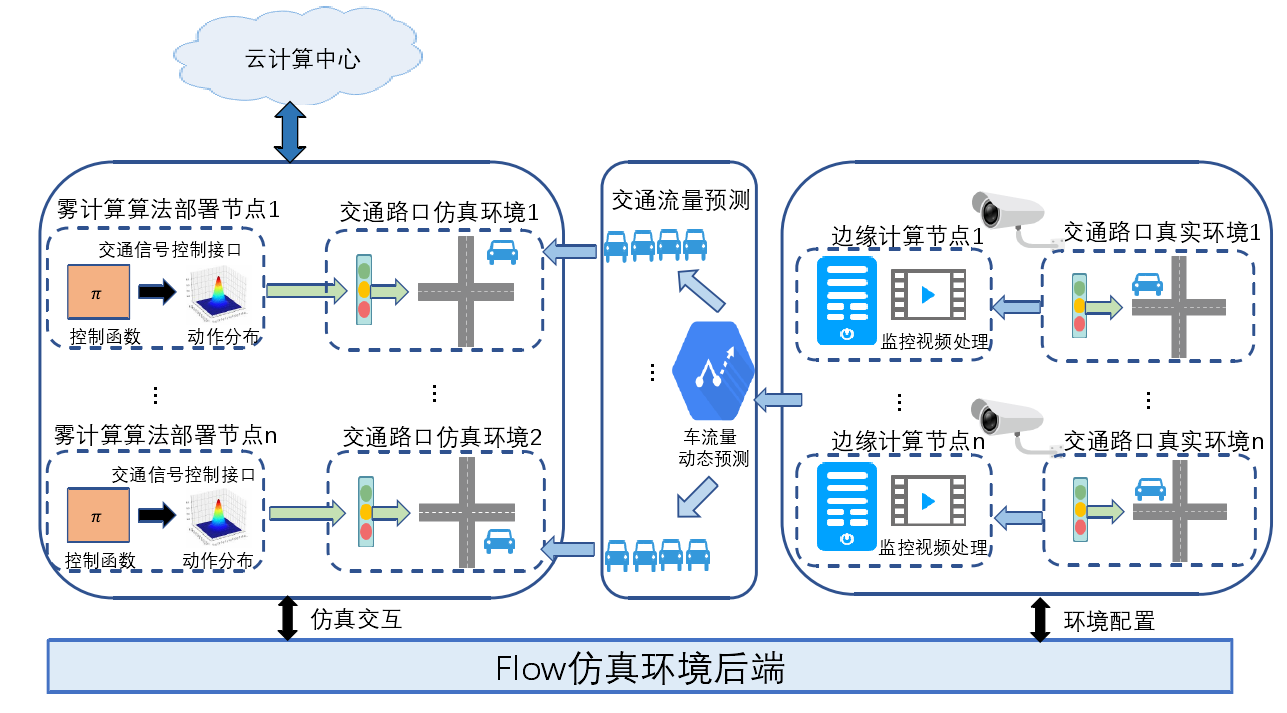
城市多交叉路口交通信号控制组合算法 General-MARL 由三个子算法构成:
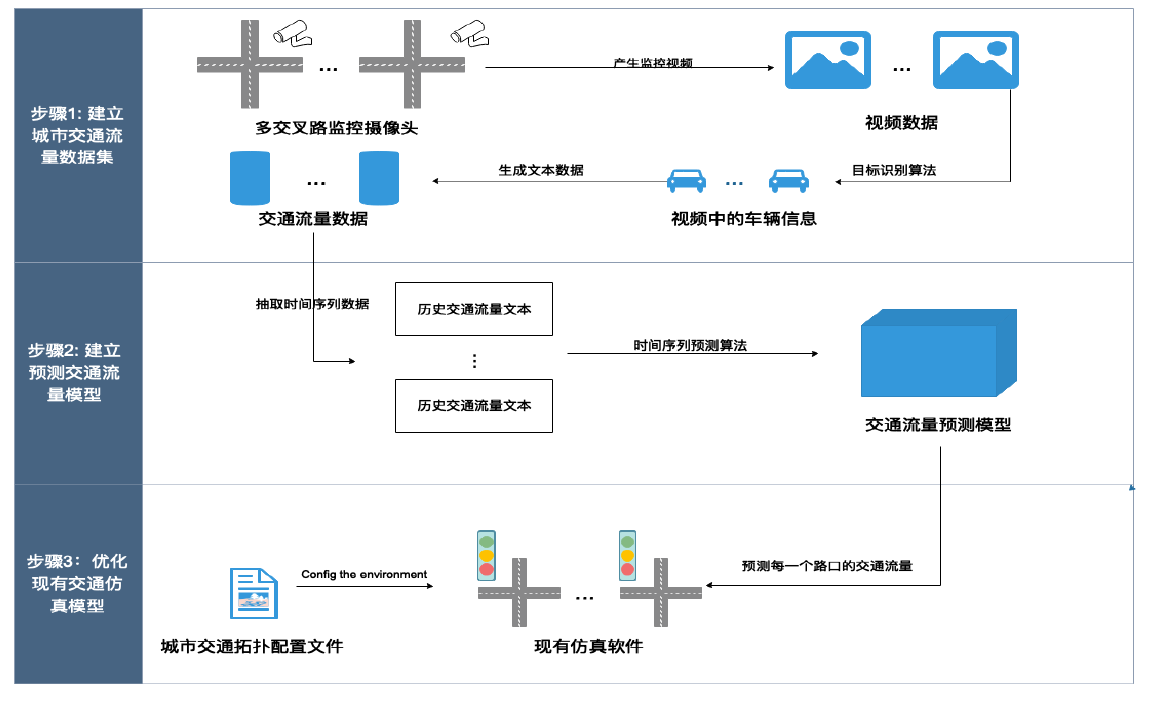
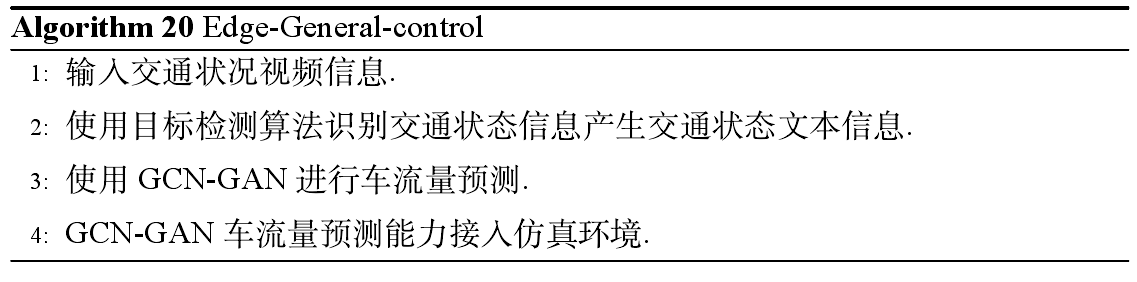
(1)边缘计算节点算法 (Edge-General-control):处理交通监控视频,生成当前路口的交通状态文本信息,引入城市交通流量预测算法 GCN-GAN,具有真实城市交通流量预测能力,并与仿真环境实时同步(该部
分非常灵活,可以引入其他流量预测算法)
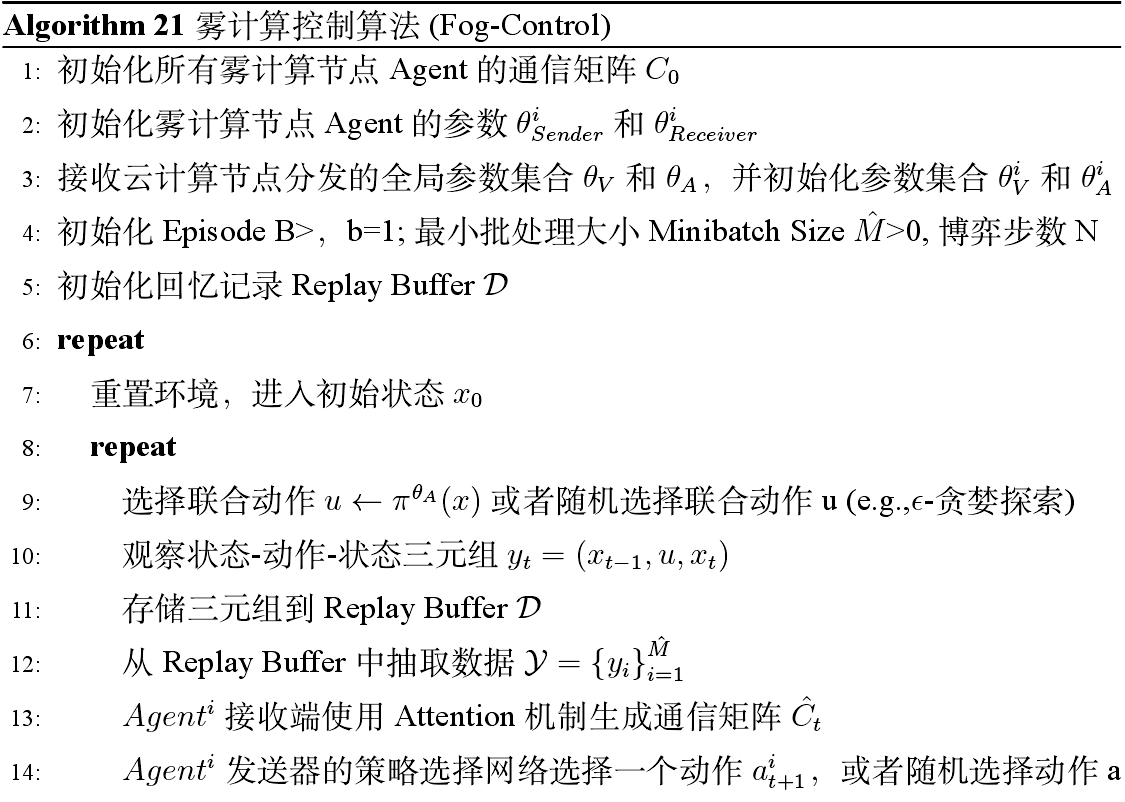
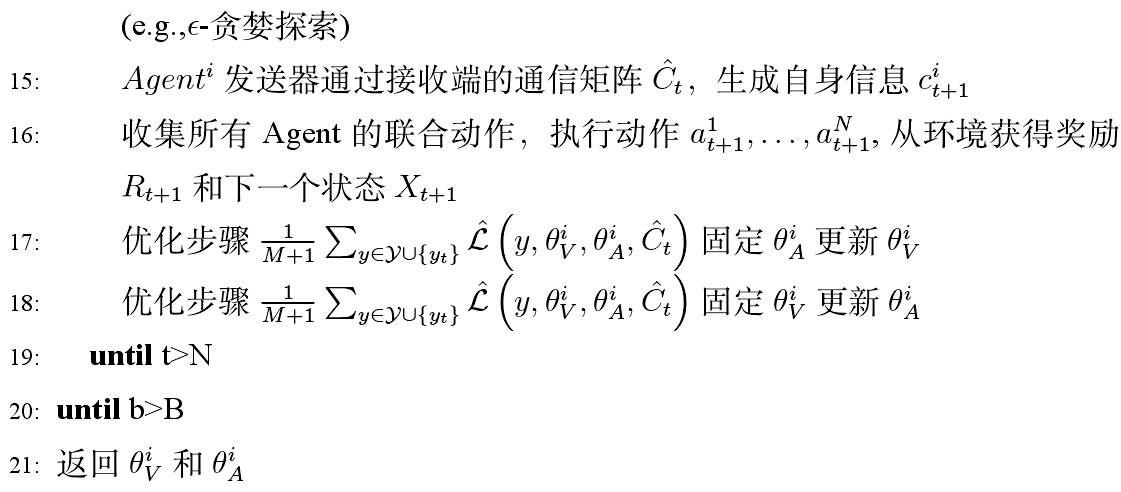
(2)雾计算节点算法 (Fog-General-control):融合 Nash-A2C 算法(Nash-A3C 算法的“平行宇宙”的节点)和 MAAC 算法汇总的智能通信部分,产生城市交通信号的控制信号
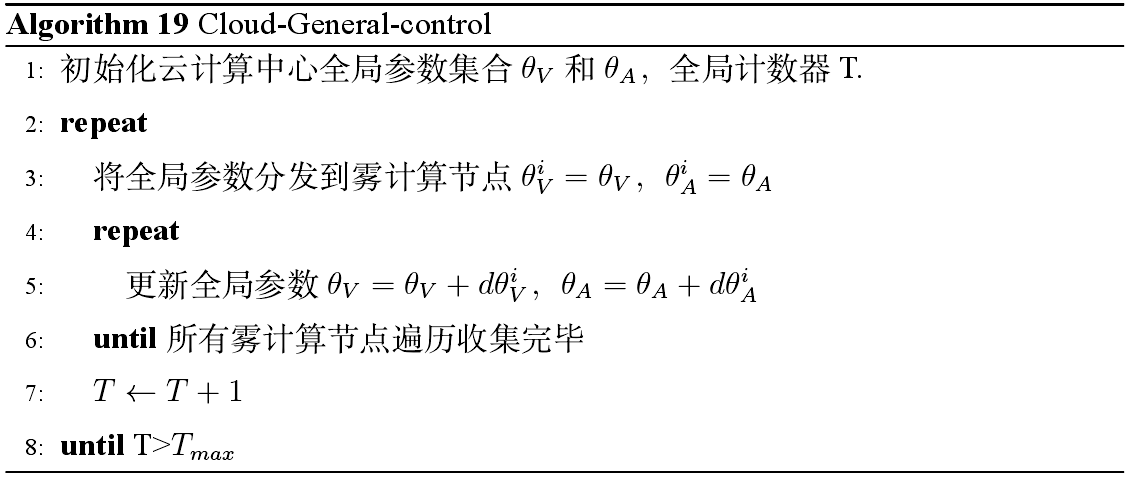
(3)云计算节点的算法 (Cloud-General-control):部署 Nash-A2C算法(Nash-A3C 算法的“平行宇宙”的中心节点)
算法部署架构图:

云计算算法步骤:
边缘计算算法步骤:
雾计算算法步骤:
仿真实验
配置:
考虑延时的训练过程:
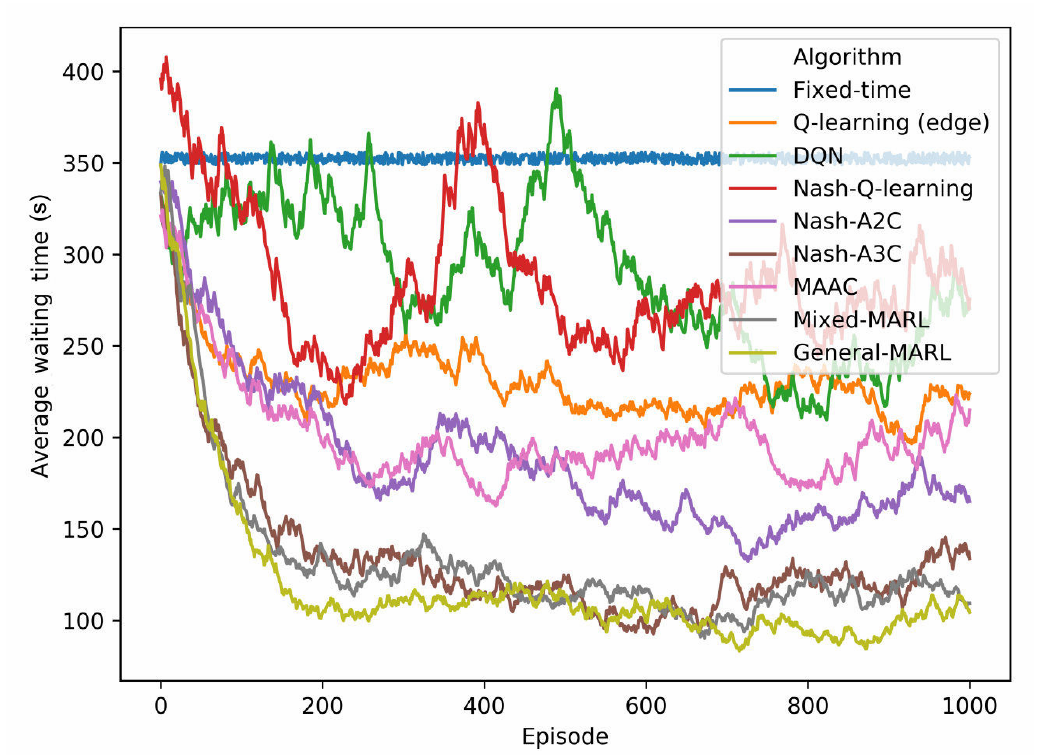
实验结果:
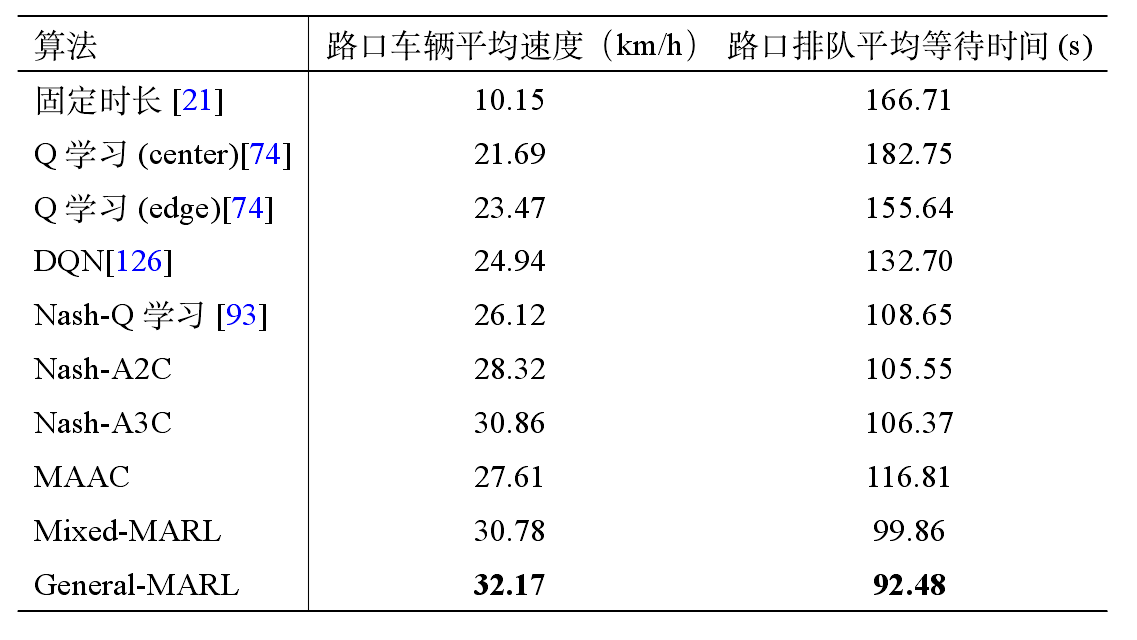
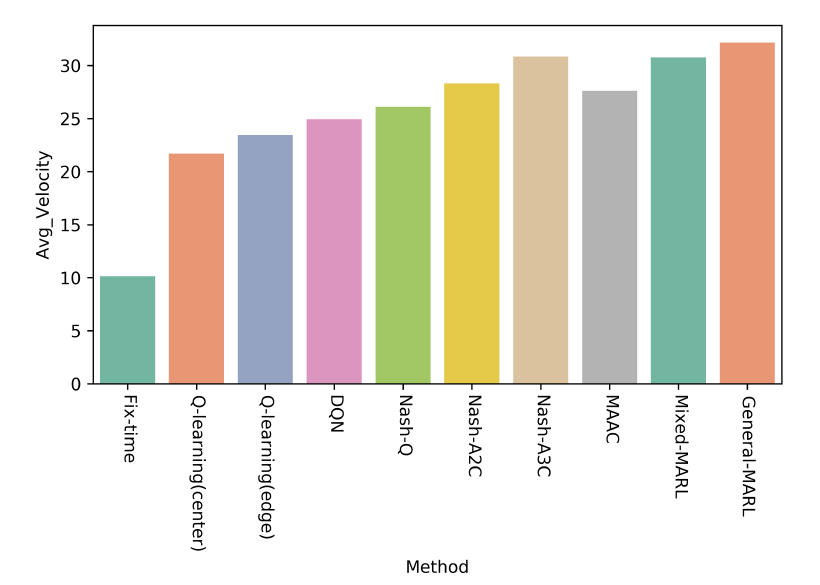
每个模型的平均通过速度:
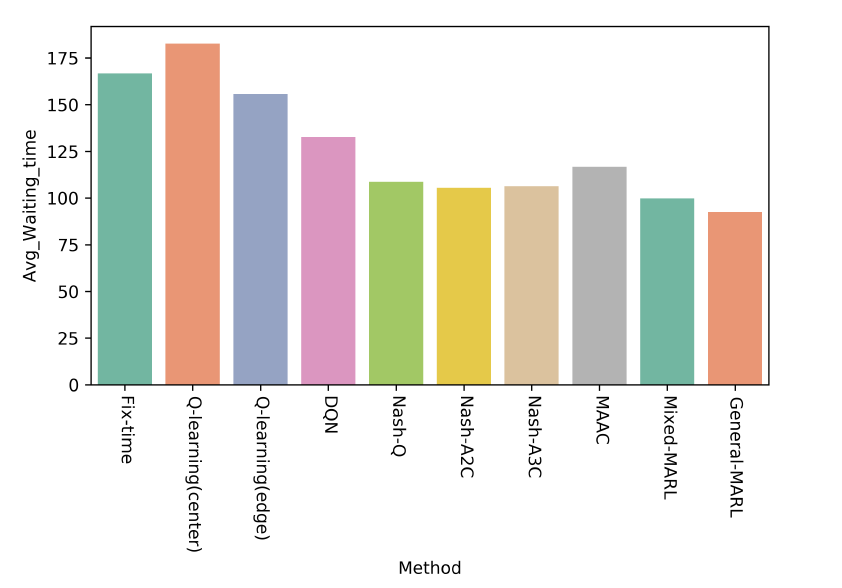
每个模型的平均等待时长:
每个模型的车辆累计等待时长:
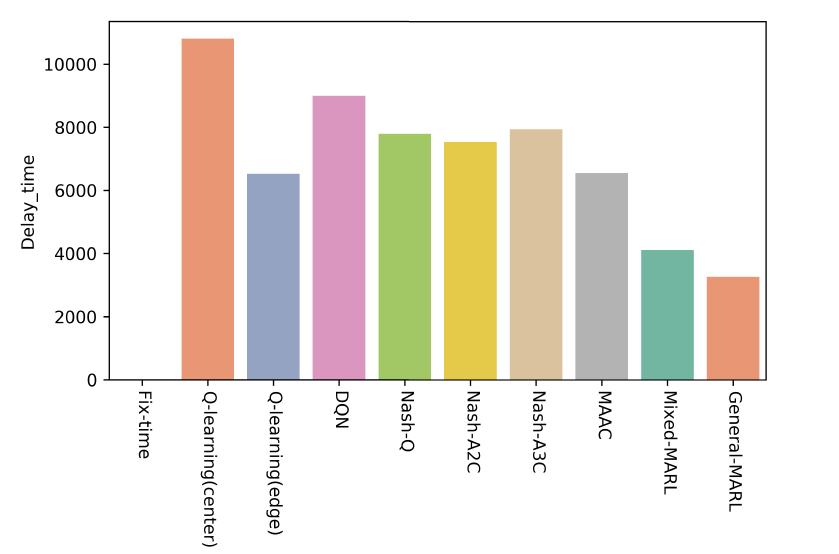
每个模型的网络延时时间:
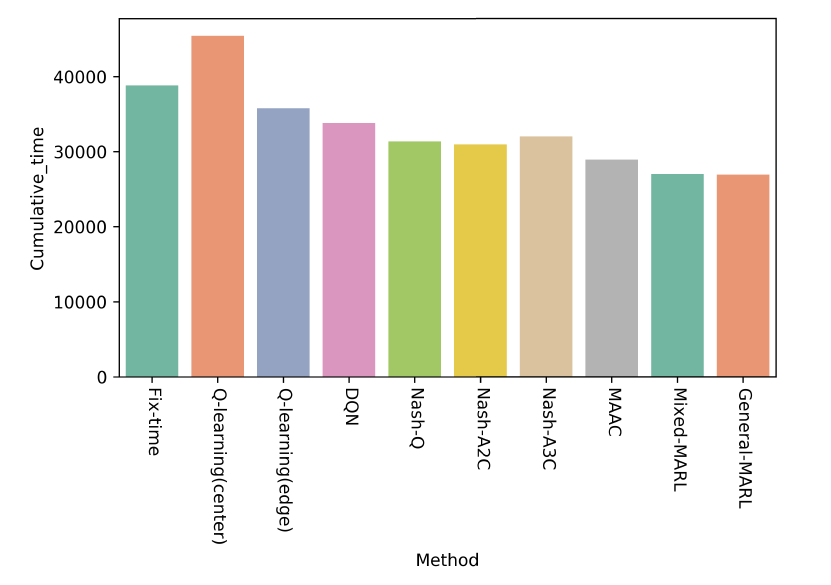
实验结论:
多智能体强化学习在城市交通信号控制研究需要考虑仿真环境、算法过程、部署架构等多方面因素。General-MARL 算法综合考虑了这些因素,从实验结果上分析,表现最佳。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号