DirectX透视投影矩阵推导
定义一个相机的位置和方向。知道了相机的位置和方向,我们是通过定义一个平截头体(frustum)来描述相机的范围,裁剪阶段也是依据这个范围空间进行裁剪。平截头体如下:
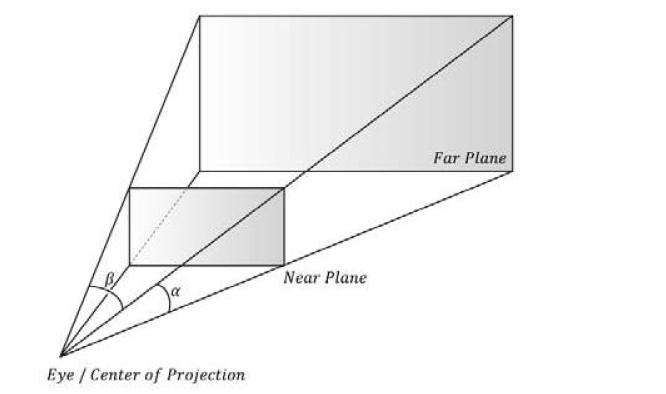
\(\alpha\) 表示垂直视角, \(\beta\) 表示水平视角,near plane 表示近平面,far plane 表示远平面。
通常,我们在观察空间中使用4个参数定义,以原点为中心,观察方向为 z 轴正方向的 frustum。四个参数分别为:
- \(\mathrm{n}\), 近平面位置
- \(\mathrm{f}\), 远平面位置
- \(\alpha\), 垂直视角
- \(r\), 横纵比 (aspect ratio)
在观察空间中,近平面和远平面都平行于 xy 平面,所以只需要指定他们沿 z 轴方向的距离即可表示这两个平面。横纵比由 \(r=w/h\) 表示,其中 w 表示投影窗口的宽度,h 表示投影窗口的高度(单位由观察空间决定)。投影窗口本质是场景在观察空间中的2D图像,而且该图像最终会被映射到后台缓冲区,所以投影窗口的比例应和后台缓冲区的尺寸比例一致。当后台缓冲 区的尺寸为 800×600 时,横纵比 r = 800/600 ≈ 1.333 。不一致会导致变形,比如一个圆被拉伸成椭圆。
计算水平视角 \(\beta\)
首先,假设一个投影平面,为了方便计算,设高 \(h=2\) ,有, \(w=2 r\) 。投影面尺寸大小不重要,重要的是比例 \(r\) 。同时,设投影面距离视点 为 \(d\) 。投影面在哪也无所谓,可以放在近平面,也可以放在 \(0-n\) 之间,但是最后发现的是,投影矩阵以及最后得到的坐标都与这个距离 \(d\) 无关。
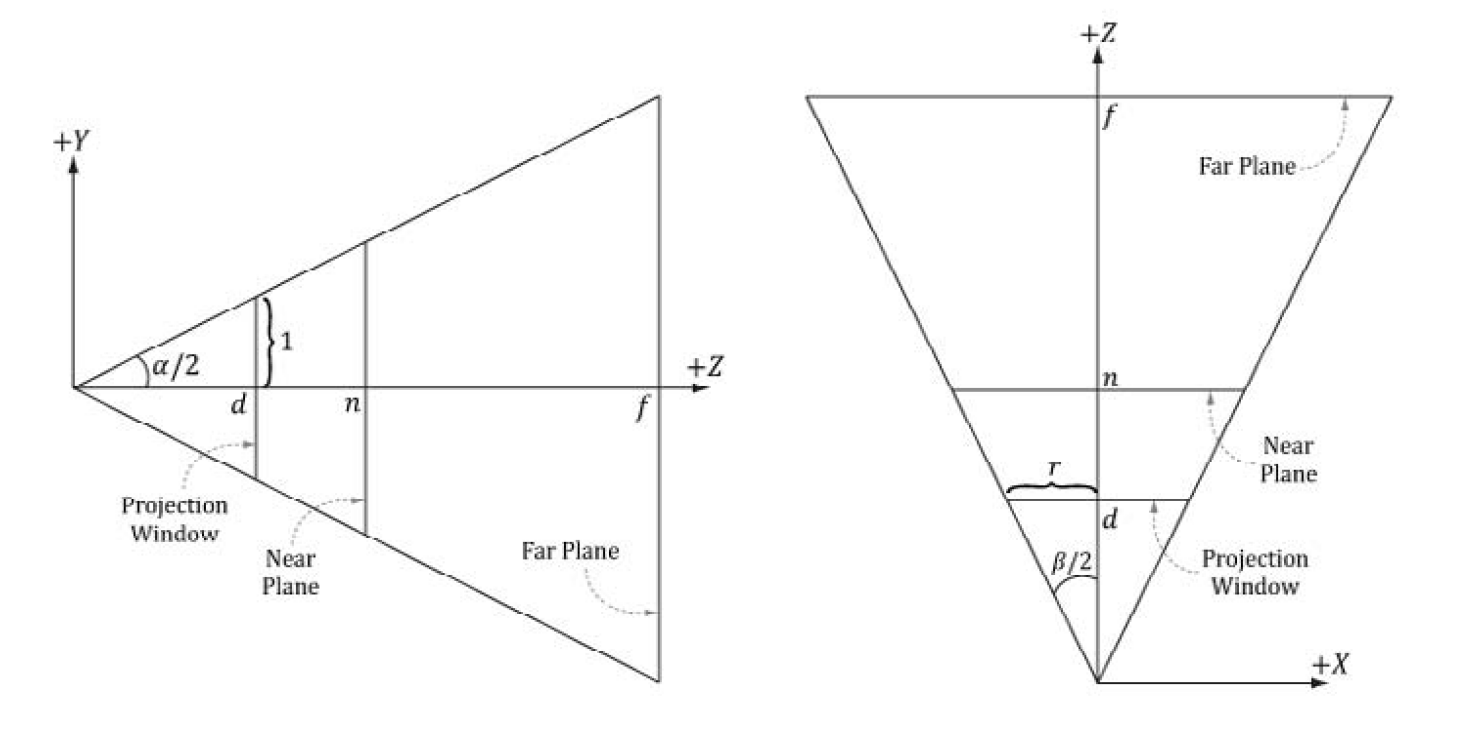
由 \(\mathrm{yz}\) 平面,有 \(\tan \left(\frac{\alpha}{2}\right)=\frac{1}{d} \rightarrow d=\cot \left(\frac{\alpha}{2}\right)\)
由 \(\mathrm{xz}\) 平面,有 \(\tan \left(\frac{\beta}{2}\right)=\frac{r}{d}=r \cdot \tan \left(\frac{\alpha}{2}\right)\)
所以,可以求得水平视角 \(\beta\) 。
计算投影窗口的投影坐标
设视觉空间中一个点的坐标为 \((x, y, z)\) ,这个点投影到投影窗口上的坐标为 \(\left(x^{\prime} , y^{\prime} , d\right)\) ,如图所示。
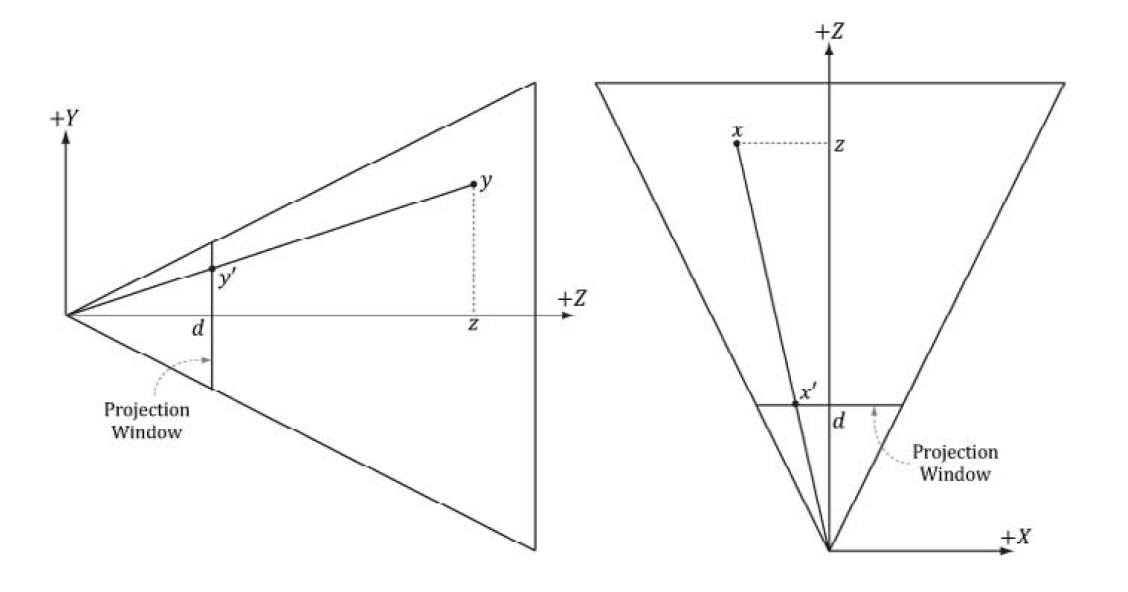
所以,根据三角形相似,有
因为在 frustum 内的点都会投影到投影面,所以我们可以反推,点 \((x, y, z)\) 在 frustum 中,当且仅当,如下条件被满足时。
- \(-r<x^{\prime}<=r\)
- \(-1<y^{\prime}<=1\)
- \(n<=z<=f\)
规范化设备坐标 (NDC, Normalized Device Coordinates)
为什么要使用NDC?
- 设备坐标系(Device),也叫屏幕坐标系,由每一个显示设备(如显示器)的像素点定义,每一个显示设备都有自己单独的坐标系统。还可以进一步在屏幕坐标系统定义一块视图区(view port)
- 上述计算的投影坐标,依赖投影窗口的横纵比,这也就意味着我们需要为硬件指定横纵比,硬件才可以执行那些与投影窗口尺寸相关的操作(比如,将投影窗口映射到后台缓冲区)
- 去除横纵比的依赖,可以简化后面的运算。NDC空间的坐标可以通过视口变换映射为设备坐标系下的屏幕坐标。
在NDC空间下,x,y 会规范到 [-1, 1] 之间,z规范到 [0, 1] 之间(d3d中,而在opengl中,z 规范到 [-1, 1])
所以NDC空间下,点 \((x, y, z)\) 在 frustum 中,当且仅当,
- \(-1<=x^{\prime} / r<=1\)
- \(-1<y^{\prime}<=1\)
- \(\mathrm{n}<=\mathrm{z}<=\mathrm{f}\)
所以,修改上面的投影公式,得到在NDC空间下的投影坐标:
在 NDC 空间中,投影窗口的高度和宽度都为 2。也就是说,现在的尺寸是固定的,硬件不需要知道横纵比,而且我们必须自己来完成投影坐标从观察空间到 NDC 空间的转换工作(图形硬件假定我们会完成这一工作,这个工作也就是视口变换)。
矩阵描述以及透视除法
现在我们想要把投影变换用矩阵来表示。但是上式中,由于都出现了除以z,而非线性的式子我们无法使用矩阵描述,但是都除以z提醒了我们可以分为两部分处理:先一个线性操作,然后一个除以z的非线性操作,但是我们经过线性变化后,原始的 z 已经丢失,我们需要想办法保存下来原始的深度 z 。解决办法是我们使用齐次坐标的 w 保存 z。所以投影矩阵大致如下:
矩阵中的 A、B 是两个对 z 线性变换的常量参数,后面会求。
任意一个frustum中的坐标 (x, y, z, 1) 与 投影矩阵乘,可以得到:
然后,每个坐标除以 \(w=z\),得到最终结果:
除以w这一步骤,又被称为透视除法,同时除以w的时候,我们不必担心 w=0,因为 w = z >= n > 0
规范化深度值
在d3d中,z会被规范到 [0, 1],令 \(g(z)\) 为映射函数,所以有,
将 \(z=n\) 和 \(z=f\) 带入,有,
解得:
有,
$ g(z) $函数图像:
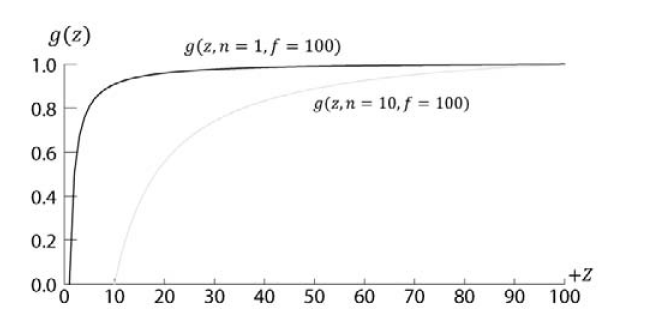
由于图像是非线性的,当 z 接近 近平面 和 远平面 时,都会出现精度问题。通常的建议是让近平面和远平面尽可能接近,把深度的精度性问题减小到最低程度。
最后,投影矩阵:
Direct3D 11 中,投影矩阵可通过 XNA 数学库获得。
static XMMATRIX XMMatrixPerspectiveFovLH( // returns projection matrix, LH表示左手坐标系
FLOAT FovAngleY, // vertical field of view angle in radians
FLOAT AspectRatio, // aspect ratio = width / height
FLOAT NearZ, // distance to near plane
FLOAT FarZ); // distance to far plane

 浙公网安备 33010602011771号
浙公网安备 33010602011771号