四轴飞行玩具的姿态解算的原理2.欧拉角及其表示
回顾:
前面讲了,飞行器坐标与地球坐标之间的夹角,就是我们要求的姿态。
姿态的表示方法有两类:无限转动法, 和有限转动法。
用于表示机体瞬间小角度变化的,是无限转动法。
其中常用于导航,工程计算的,表示最终姿态结果的,是有限转动法。
而我们可以通过特定转序,例如 ZXZ` 的“欧拉角”,来描述有限转动。
欧拉角的矩阵表示:
欧拉角的诞生,背后的故事,这里就不讲了。感兴趣可以搜索来看看。
总之,知道欧拉角是什么就行了:
当一个物体从姿势A , 先绕自身的坐标X轴旋转a角,再Y绕轴转β角,最后绕Z轴旋转θ角,得到姿态B,那么它在XYZ序上的欧拉角就是{a,β,θ};

(注意,欧拉角有12种旋转顺序,所以一定要清楚你用的是哪种顺序)
但是,如果我们用三角函数来表达欧拉角,会非常繁琐。好在数学家们很牛,他们发明了变换矩阵,用来描述欧拉角的变换。
1. 从容易理解的二维坐标入手:
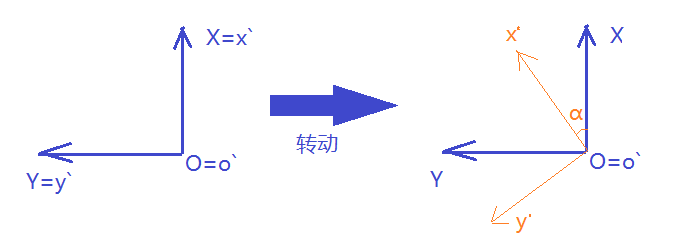
首先,我们看看二维坐标的情况。假设有一个坐标XOY,为固定坐标。有一个坐标x`oy`,为转动坐标。他们最初是重合的。
当转动坐标系x`oy`(机体坐标)绕o点逆时针转动α角后,其状态如下:
按照三角函数,机体坐标(x`oy`)在原坐标(XOY)中的关系表示如下:
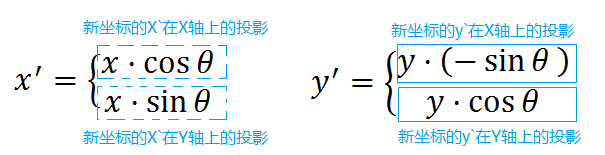
那么,我们如果用矩阵来表述这个关系,就可以写为:
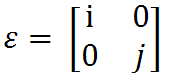 (原坐标表达)
(原坐标表达)
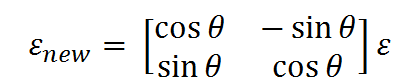 (转动θ角后的坐标表达)
(转动θ角后的坐标表达)
于是我们就有了坐标转换矩阵Cbn,它可以通过对原坐标E 做矩阵乘法,得到转动后的新坐标Enew。

注意,这个是坐标轴的转动,而如果是一个向量围绕O点做转动,那么变换矩阵就要取转置T了。
这里理解一下:
坐标轴逆时针转动,意味着原来坐标上的点,相对坐标轴顺时针转动。当坐标轴不动,向量转动逆时针转动时,相当于向量不变,坐标轴顺时针转动。

甚至,不仅仅是转动,它还可以表达拉升,扭曲等等转变。如果对自己数学有信心的小朋友们可以去尝试定量的理解(我就算了。。。)
那么,接下来就把二维的坐标系,扩展到三维空间。
2. 从二维扩大到三维:
如果用欧拉角来表示一次旋转,其实就是分解成了3次二维旋转(有限转动),所以,我们的变换矩阵也是由三个矩阵相乘得到。当然,虽然旋转是二维的,但矩阵元素一定是三维的。
先看看一个坐标转动的变换矩阵:

这描述了: Z轴固定的,绕Z旋转θ角的转动。可见,固定轴是 [0 0 1]
那么,当我们设定有限旋转的次序是 ZXY时,则一次完整的欧拉变换,需要用三个矩阵来标识:

当然,我们可以把三个矩阵乘起来,得到一个最终的变换矩阵
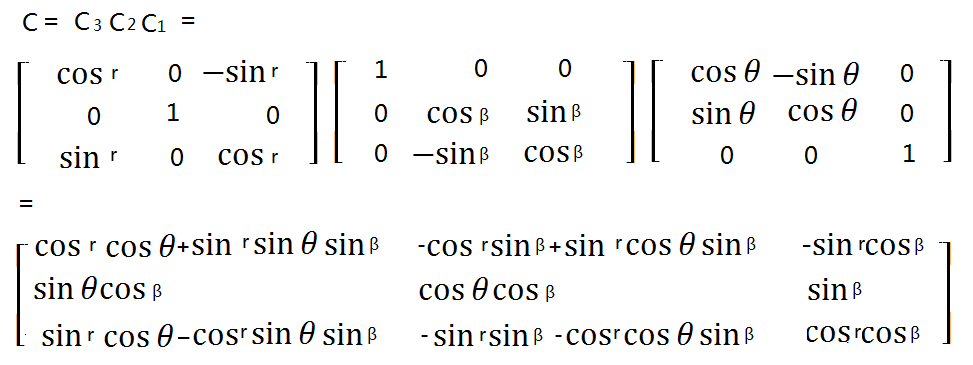
最终这个C矩阵,就是我们的有限旋转矩阵。可以直接用于计算了。
等等,还没完!
当r , θ, β 三个角足够小的时候,我们实际上可以忽略高阶小量,则可以得到矩阵C的另外一个表达
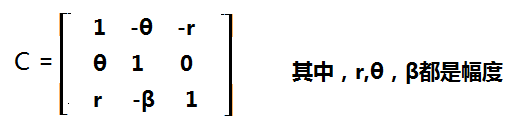
这个是无限旋转矩阵,它成立时有条件的,即三个转角都足够小。
它的意义是,我们如果使用这个矩阵来对陀螺仪的输出做累乘,实际上是可以得到一个初步的姿态的。

OK。 关于欧拉角的矩阵表示,就说到这里。
但是问题还没有结束,我们实际工作中,用的并不是欧拉角做计算,而是四元数。 那么接下来有空的时候,我再讲讲四元数的事情。

