算法导论笔记(五)
第十二章:二叉查找树
摘要:
本章介绍了二叉查找树的概念及操作。主要内容包括二叉查找树的性质,如何在二叉查找树中查找最大值、最小值和给定的值,如何找出某一个元素的前驱和后继,如何在二叉查找树中进行插入和删除操作。在二叉查找树上执行这些基本操作的时间与树的高度成正比,一棵随机构造的二叉查找树的期望高度为O(lgn),从而基本动态集合的操作平均时间为θ(lgn)。
1、二叉查找树
二叉查找树是按照二叉树结构来组织的,因此可以用二叉链表结构表示。二叉查找树中的关键字的存储方式满足的特征是:设x为二叉查找树中的一个结点。如果y是x的左子树中的一个结点,则key[y]≤key[x]。如果y是x的右子树中的一个结点,则key[x]≤key[y]。根据二叉查找树的特征可知,采用中根遍历一棵二叉查找树,可以得到树中关键字有小到大的序列。http://www.cnblogs.com/Anker/archive/2013/01/27/2878594.html介绍了二叉树概念及其遍历。一棵二叉树查找及其中根遍历结果如下图所示:
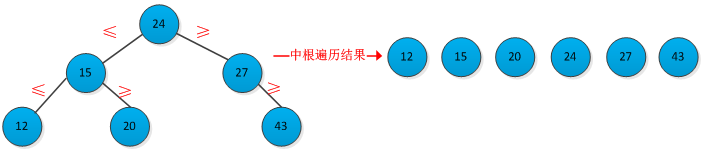
书中给出了一个定理:如果x是一棵包含n个结点的子树的根,则其中根遍历运行时间为θ(n)。
问题:二叉查找树性质与最小堆之间有什么区别?能否利用最小堆的性质在O(n)时间内,按序输出含有n个结点的树中的所有关键字?
2、查询二叉查找树
二叉查找树中最常见的操作是查找树中的某个关键字,除了基本的查询,还支持最大值、最小值、前驱和后继查询操作,书中就每种查询进行了详细的讲解。
(1)查找SEARCH
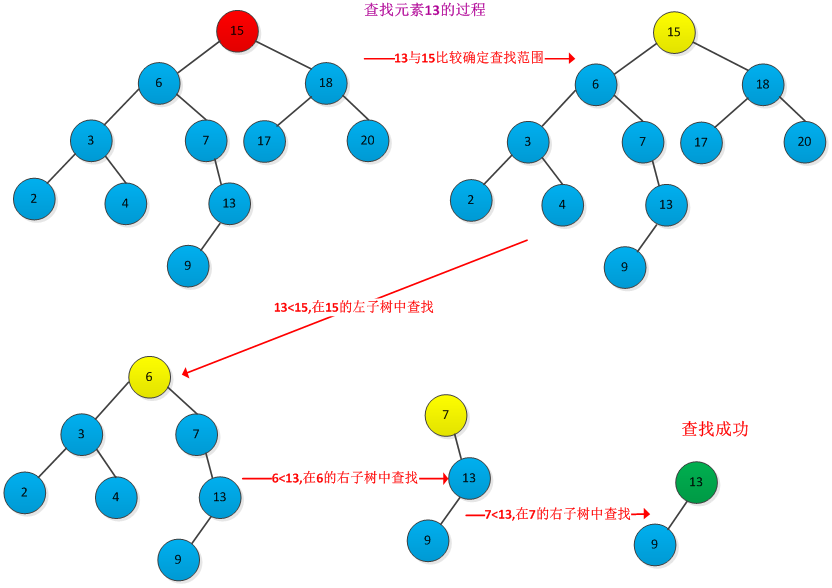
在二叉查找树中查找一个给定的关键字k的过程与二分查找很类似,根据二叉查找树在的关键字存放的特征,很容易得出查找过程:首先是关键字k与树根的关键字进行比较,如果k大比根的关键字大,则在根的右子树中查找,否则在根的左子树中查找,重复此过程,直到找到与遇到空结点为止。例如下图所示的查找关键字13的过程:(查找过程每次在左右子树中做出选择,减少一半的工作量)
书中给出了查找过程的递归和非递归形式的伪代码:
TREE_SEARCH(x,k)
if x=NULL or k=key[x]
then return x
if(k<key[x])
then return TREE_SEARCH(left[x],k)
else
then return TREE_SEARCH(right[x],k)
ITERATIVE_TREE_SEARCH(x,k)
while x!=NULL and k!=key[x]
do if k<key[x]
then x=left[x]
else
then x=right[x]
return x
(2)查找最大关键字和最小关键字
根据二叉查找树的特征,很容易查找出最大和最小关键字。查找二叉树中的最小关键字:从根结点开始,沿着各个节点的left指针查找下去,直到遇到NULL时结束。如果一个结点x无左子树,则以x为根的子树中,最小关键字就是key[x]。查找二叉树中的最大关键字:从根结点开始,沿着各个结点的right指针查找下去,直到遇到NULL时结束。书中给出了查找最大最小关键字的伪代码:
TREE_MINMUM(x)
while left[x] != NULL
do x=left[x]
return x
TREE_MAXMUM(x)
while right[x] != NULL
do x= right[x]
return x
(3)前驱和后继
给定一个二叉查找树中的结点,找出在中序遍历顺序下某个节点的前驱和后继。如果树中所有关键字都不相同,则某一结点x的前驱就是小于key[x]的所有关键字中最大的那个结点,后继即是大于key[x]中的所有关键字中最小的那个结点。根据二叉查找树的结构和性质,不用对关键字做任何比较,就可以找到某个结点的前驱和后继。
查找前驱步骤:先判断x是否有左子树,如果有则在left[x]中查找关键字最大的结点,即是x的前驱。如果没有左子树,则从x继续向上执行此操作,直到遇到某个结点是其父节点的右孩子结点。例如下图查找结点7的前驱结点6过程: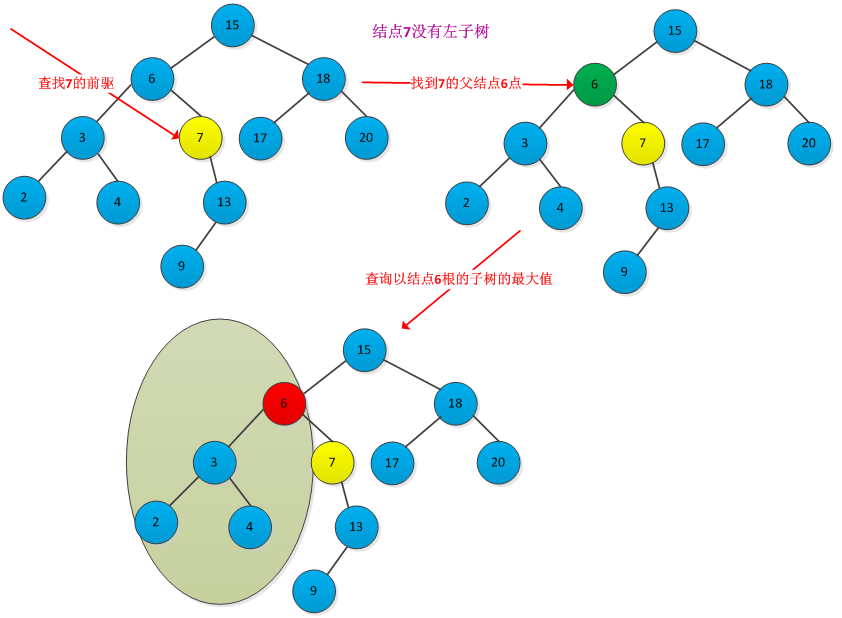
查找后继步骤:先判断x是否有右子树,如果有则在right[x]中查找关键字最小的结点,即使x的后继。如果没有右子树,则从x的父节点开始向上查找,直到遇到某个结点是其父结点的左儿子的结点时为止。例如下图查找结点13的后继结点15的过程: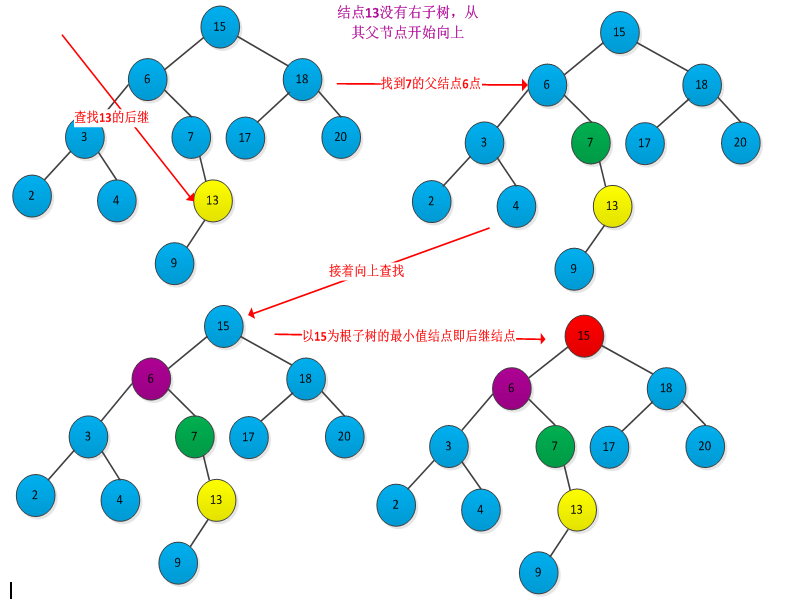
书中给出了求x结点后继结点的伪代码:
TREE_PROCESSOR(x)
if right[x] != NULL
then return TREE_MINMUM(right(x))
y=parent[x]
while y!= NULL and x ==right[y]
do x = y
y=parent[y]
return y
定理:对一棵高度为h的二叉查找,动态集合操作SEARCH、MINMUM、MAXMUM、SUCCESSOR、PROCESSOR等的运行时间均为O(h)。
3、插入和删除
插入和删除会引起二叉查找表示的动态集合的变化,难点在在插入和删除的过程中要保持二叉查找树的性质。插入过程相当来说要简单一些,删除结点比较复杂。
(1)插入
插入结点的位置对应着查找过程中查找不成功时候的结点位置,因此需要从根结点开始查找带插入结点位置,找到位置后插入即可。下图所示插入结点过程:
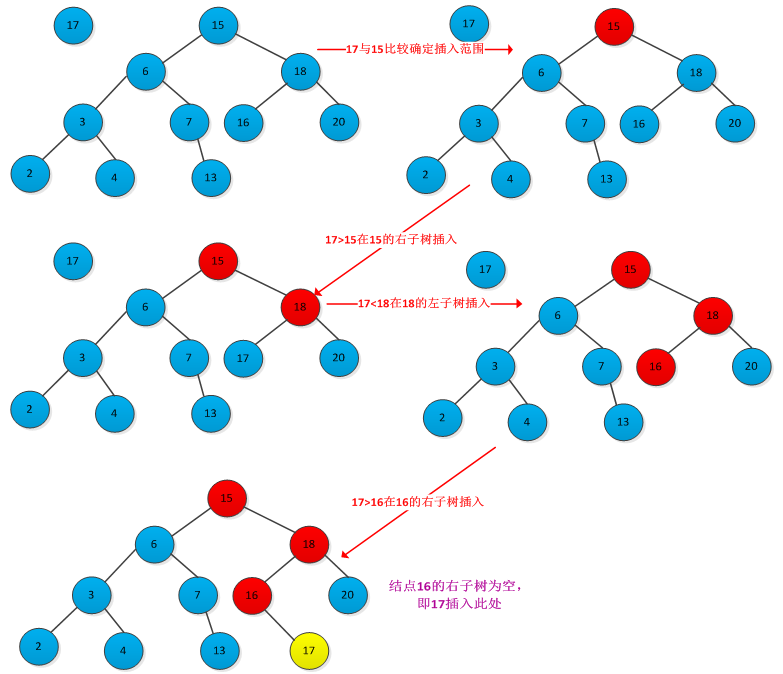
书中给出了插入过程的伪代码:
TREE_INSERT(T,z)
y = NULL;
x =root[T]
while x != NULL
do y =x
if key[z] < key[x]
then x=left[x]
else x=right[x]
parent[z] =y
if y=NULL
then root[T] =z
else if key[z]>key[y]
then keft[y] = z
else right[y] =z
插入过程运行时间为O(h),h为树的高度。
(2)删除
从二叉查找树中删除给定的结点z,分三种情况讨论:
<1>结点z没有左右子树,则修改其父节点p[z],使其为NULL。删除过程如下图所示:
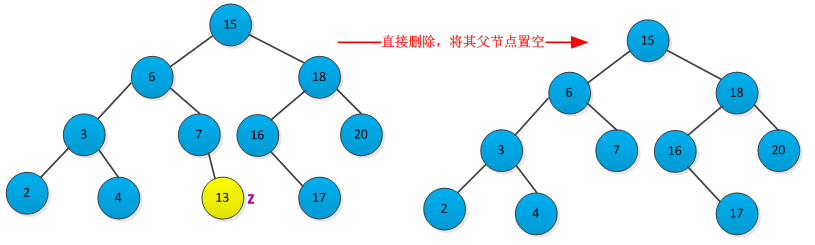
<2>如果结点z只有一个子树(左子树或者右子树),通过在其子结点与父节点建立一条链来删除z。删除过程如下图所示: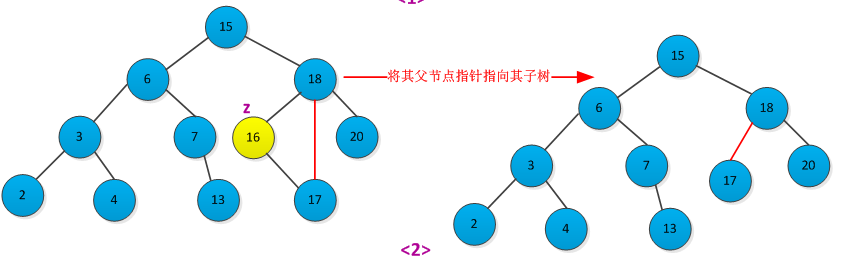
<3>如果z有两个子女,则先删除z的后继y(y没有左孩子),在用y的内容来替代z的内容。
书中给出了删除过程的伪代码:
TREE_DELETE(T,z)
if left[z] ==NULL or right[z] == NULL
then y=z
else y=TREE_SUCCESSOR(z)
if left[y] != NULL
then x=left[y]
else x=right[y]
if x!= NULL
then parent[x] = parent[y]
if p[y] ==NULL
then root[T] =x
else if y = left[[prarnt[y]]
then left[parent[y]] = x
else right[parent[y]] =x
if y!=z
then key[z] = key[y]
copy y's data into z
return y
定理:对高度为h的二叉查找树,动态集合操作INSERT和DELETE的运行时间为O(h)。
4、实现测试
采用C++语言实现一个简单的二叉查找树,支持动态集合的基本操作:search、minmum、maxmum、predecessor、successor、insert和delete。设计的二叉查找树结构如下所示:
template <class T>
class BinarySearchTreeNode
{
public:
T elem;
struct BinarySearchTreeNode<T> *parent;
struct BinarySearchTreeNode<T>* left;
struct BinarySearchTreeNode<T>* right;
};
template <class T>
class BinarySearchTree
{
public:
BinarySearchTree();
void tree_insert(const T& elem);
int tree_remove(const T& elem );
BinarySearchTreeNode<T>* tree_search(const T& elem)const;
T tree_minmum(BinarySearchTreeNode<T>* root)const;
T tree_maxmum(BinarySearchTreeNode<T>* root)const;
T tree_successor(const T& elem) const;
T tree_predecessor(const T& elem)const;
int empty() const;
void inorder_tree_walk()const;
BinarySearchTreeNode<T>* get_root()const {return root;}
private:
BinarySearchTreeNode<T>* root;
};
完整程序如下所示:
#include <iostream>
#include <stack>
#include <cstdlib>
using namespace std;
template <class T>
class BinarySearchTreeNode
{
public:
T elem;
struct BinarySearchTreeNode<T> *parent;
struct BinarySearchTreeNode<T>* left;
struct BinarySearchTreeNode<T>* right;
};
template <class T>
class BinarySearchTree
{
public:
BinarySearchTree();
void tree_insert(const T& elem);
int tree_remove(const T& elem );
BinarySearchTreeNode<T>* tree_search(const T& elem)const;
T tree_minmum(BinarySearchTreeNode<T>* root)const;
T tree_maxmum(BinarySearchTreeNode<T>* root)const;
T tree_successor(const T& elem) const;
T tree_predecessor(const T& elem)const;
int empty() const;
void inorder_tree_walk()const;
BinarySearchTreeNode<T>* get_root()const {return root;}
private:
BinarySearchTreeNode<T>* root;
};
template <class T>
BinarySearchTree<T>::BinarySearchTree()
{
root = NULL;
}
template <class T>
void BinarySearchTree<T>::tree_insert(const T& elem)
{
if(!empty())
{
BinarySearchTreeNode<T> *pnode = root;
BinarySearchTreeNode<T> *qnode = NULL;
BinarySearchTreeNode<T> *newnode = new BinarySearchTreeNode<T>;
newnode->elem = elem;
newnode->parent = NULL;
newnode->left = NULL;
newnode->right = NULL;
while(pnode)
{
qnode = pnode;
if(pnode->elem > elem)
pnode = pnode->left;
else
pnode = pnode->right;
}
if(qnode->elem > elem)
qnode->left = newnode;
else
qnode->right = newnode;
newnode->parent = qnode;
}
else
{
root = new BinarySearchTreeNode<T>;
root->elem = elem;
root->parent =NULL;
root->left = NULL;
root->right = NULL;
}
}
template <class T>
int BinarySearchTree<T>::tree_remove(const T&elem)
{
BinarySearchTreeNode<T> *pnode;
BinarySearchTreeNode<T> *parentnode,*snode;
pnode = tree_search(elem);
if(pnode != NULL)
{
parentnode = pnode->parent;
if(pnode->right == NULL || pnode->left == NULL)
{
if(pnode->right != NULL)
{
if(parentnode->left == pnode)
parentnode->left = pnode->right;
if(parentnode->right == pnode)
parentnode->right = pnode->right;
pnode->right->parent = parentnode;
}
else if(pnode->left != NULL)
{
if(parentnode->left == pnode)
parentnode->left = pnode->left;
if(parentnode->right == pnode)
parentnode->right = pnode->left;
pnode->left->parent = parentnode;
}
else
{
if(parentnode->left == pnode)
parentnode->left = NULL;
if(parentnode->right == pnode)
parentnode->right = NULL;
}
delete pnode;
}
else
{
snode = tree_search(tree_successor(pnode->elem));
pnode->elem = snode->elem;
if(snode->parent->left == snode)
{
snode->parent->left = snode->right;
snode->right->parent = snode->parent->left;
}
if(snode->parent->right == snode)
{
snode->parent->right = snode->right;
snode->right->parent = snode->parent->right;
}
delete snode;
}
return 0;
}
return -1;
}
template <class T>
BinarySearchTreeNode<T>* BinarySearchTree<T>::tree_search(const T& elem)const
{
BinarySearchTreeNode<T> *pnode = root;
while(pnode)
{
if(pnode->elem == elem)
break;
else if(pnode->elem > elem)
pnode = pnode->left;
else
pnode = pnode->right;
}
return pnode;
}
template <class T>
T BinarySearchTree<T>::tree_minmum(BinarySearchTreeNode<T>* root)const
{
BinarySearchTreeNode<T> *pnode = root;
if(pnode->left)
{
while(pnode->left)
pnode = pnode->left;
}
return pnode->elem;
}
template <class T>
T BinarySearchTree<T>::tree_maxmum(BinarySearchTreeNode<T>* root)const
{
BinarySearchTreeNode<T> *pnode = root;
if(pnode->right)
{
while(pnode->right)
pnode = pnode->right;
}
return pnode->elem;
}
template <class T>
T BinarySearchTree<T>::tree_successor(const T& elem) const
{
BinarySearchTreeNode<T>* pnode = tree_search(elem);
BinarySearchTreeNode<T>* parentnode;
if(pnode != NULL)
{
if(pnode->right)
return tree_minmum(pnode->right);
parentnode = pnode->parent;
while(parentnode && pnode == parentnode->right)
{
pnode = parentnode;
parentnode = parentnode->parent;
}
if(parentnode)
return parentnode->elem;
else
return T();
}
return T();
}
template <class T>
T BinarySearchTree<T>::tree_predecessor(const T& elem)const
{
BinarySearchTreeNode<T>* pnode = tree_search(elem);
BinarySearchTreeNode<T>* parentnode;
if(pnode != NULL)
{
if(pnode->right)
return tree_maxmum(pnode->right);
parentnode = pnode->parent;
while(parentnode && pnode == parentnode->left)
{
pnode = parentnode;
parentnode = pnode->parent;
}
if(parentnode)
return parentnode->elem;
else
return T();
}
return T();
}
template <class T>
int BinarySearchTree<T>::empty() const
{
return (NULL == root);
}
template <class T>
void BinarySearchTree<T>::inorder_tree_walk()const
{
if(NULL != root)
{
stack<BinarySearchTreeNode<T>*> s;
BinarySearchTreeNode<T> *ptmpnode;
ptmpnode = root;
while(NULL != ptmpnode || !s.empty())
{
if(NULL != ptmpnode)
{
s.push(ptmpnode);
ptmpnode = ptmpnode->left;
}
else
{
ptmpnode = s.top();
s.pop();
cout<<ptmpnode->elem<<" ";
ptmpnode = ptmpnode->right;
}
}
}
}
int main()
{
BinarySearchTree<int> bstree;
BinarySearchTreeNode<int>* ptnode,*proot;
bstree.tree_insert(32);
bstree.tree_insert(21);
bstree.tree_insert(46);
bstree.tree_insert(54);
bstree.tree_insert(16);
bstree.tree_insert(38);
bstree.tree_insert(70);
cout<<"inorder tree walk is: ";
bstree.inorder_tree_walk();
proot = bstree.get_root();
cout<<"\nmax value is: "<<bstree.tree_maxmum(proot)<<endl;
cout<<"min value is: "<<bstree.tree_minmum(proot)<<endl;
ptnode = bstree.tree_search(38);
if(ptnode)
cout<<"the element 38 is exist in the binary tree.\n";
else
cout<<"the element 38 is not exist in the binary tree.\n";
cout<<"the successor of 38 is: "<<bstree.tree_successor(38)<<endl;
cout<<"the predecessor of 38 is:"<<bstree.tree_predecessor(38)<<endl;
if(bstree.tree_remove(46) == 0)
cout<<"delete 46 successfully"<<endl;
else
cout<<"delete 46 failed"<<endl;
cout<<"inorder tree walk is: ";
bstree.inorder_tree_walk();
exit(0);
}
程序测试结果如下所示:
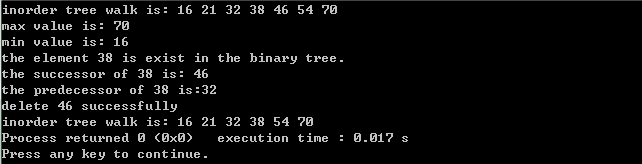
二叉树实现时候添加了一个父结点指针,方便寻找给定结点的前驱和后继。二叉树中删除操作实现比较复杂,需要分类讨论,我分三种情况进行讨论,程序写的有些繁琐,可以进行优化。优化后的代码如下:
template <class T>
int BinarySearchTree<T>::tree_delete(const T& elem)
{
//找到该元素对应的结点
BinarySearchTreeNode<T>* pnode = tree_search(elem);
if(NULL != pnode)
{
BinarySearchTreeNode<T> *qnode,*tnode;
//判断结点是否有左右孩子
if(pnode->left == NULL || pnode->right == NULL)
qnode = pnode; //有一个左孩子或者一个右孩子和没有左右孩子
else
qnode = tree_search(tree_successor(elem)); //有左右孩子
if(NULL != qnode->left)
tnode = qnode->left;
else
tnode = qnode->right;
if(NULL != tnode)
tnode->parent = qnode->parent;
if(qnode->parent == NULL)
root = tnode;
else
if(qnode == qnode->parent->left)
qnode->parent->left = tnode;
else
qnode->parent->right = tnode;
if(qnode != pnode)
pnode->elem = qnode->elem; //将后继结点的值复制到要删除的结点的值
delete qnode;
return 0;
}
return -1;
}
5、随机构造二叉查找树
二叉查找上各种基本操作的运行时间都是O(h),h为树的高度。但是在元素插入和删除过程中,树的高度会发生改变。如果n个元素按照严格增长的顺序插入,那个构造出的二叉查找树的高度为n-1。例如按照先后顺序插入7、15、18、20、34、46、59元素构造二叉查找树,二叉查找树结构如下所示: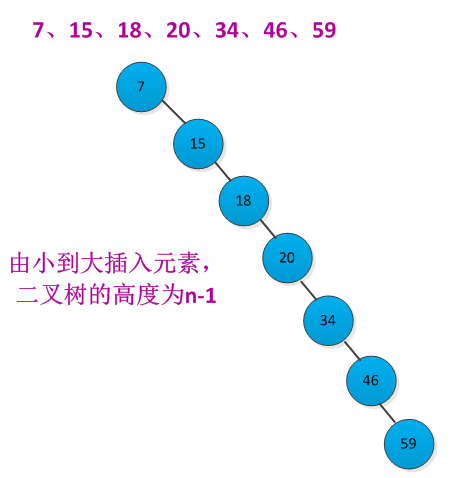
第十三章:红黑树
摘要:
红黑树是一种二叉查找树,但在每个结点上增加了一个存储位表示结点的颜色,可以是RED或者BLACK。通过对任何一条从根到叶子的路径上各个着色方式的限制,红黑树确保没有一条路径会比其他路径长出两倍,因而是接近平衡的。本章主要介绍了红黑树的性质、左右旋转、插入和删除。重点分析了在红黑树中插入和删除元素的过程,分情况进行详细讨论。一棵高度为h的二叉查找树可以实现任何一种基本的动态集合操作,如SEARCH、PREDECESSOR、SUCCESSOR、MIMMUM、MAXMUM、INSERT、DELETE等。当二叉查找树的高度较低时,这些操作执行的比较快,但是当树的高度较高时,这些操作的性能可能不比用链表好。红黑树(red-black tree)是一种平衡的二叉查找树,它能保证在最坏情况下,基本的动态操作集合运行时间为O(lgn)。本章内容有些复杂,看了两天,才大概清楚其插入和删除过程,日后需要经常回顾,争取完全消化掉。红黑树的用途非常广泛,例如STL中的map就是采用红黑树实现的,效率非常之高,有机会可以研究一下STL的源代码。
1、红黑树的性质
红黑树中的每个结点包含五个域:color、key、left、right和parent。如果某结点没有一个子结点或父结点,则该结点相应的指针parent域包含值为NIL(NIL并是是空指针,此处有些迷惑,一会解释)。把NIL视为指向红黑树的外结点(叶子)的指针,而把带关键字的结点视为红黑树的内结点。红黑树结点结构如下所示:
#define RED 0
#define BLACK 1
struct RedBlackTreeNode
{
T key;
struct RedBlackTreeNode * parent;
struct RedBlackTreeNode * left;
struct RedBlackTreeNode * right;
int color;
};
红黑树的性质如下:
(1)每个结点或是红色,或是黑色。
(2)根结点是黑色。
(3)每个叶子结点(NIL)是黑色。
(4)如果有一个结点是红色,则它的两个儿子都是黑色。
(5)对每个结点,从该结点到其孙子结点的所有路径上包含相同数目的黑色结点。
如下图是一棵红黑树:

从图可以看出NIL不是空指针,而是一个叶子结点。实际操作的时候可以将NIL视为哨兵,这样便于对黑红色进行操作。红黑树的操作主要是对内部结点操作,因为内部结点存储了关键字的值。书中为了便于讨论,忽略了叶子结点的,如是上图红黑树变成如下图所示: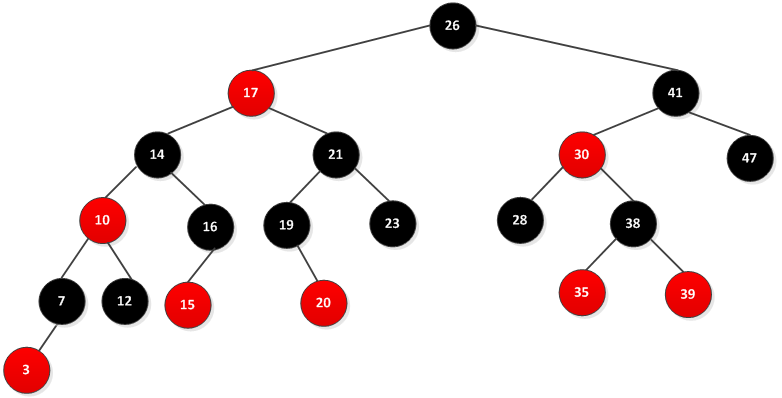
书中给出了黑高度的概念:从某个结点x出发(不包含该结点)到达一个叶子结点的任意一条路径上,黑色结点的个数称为该结点的黑高度。由红黑树的性质(5)可知,从该结点出发的所有下降路径都有相同的黑色结点个数。红黑树的黑高度定义为其根结点的黑高度。
书中给出了一个引理来说明为什么红黑树是一种好的查找树,并对引理进行了证明(采用归纳法进行证明的,需要很强的归纳推理知识,正是我的不足之处,看书的痛苦在于此)。
引理:一棵有n个内结点的红黑树的高度之多为2lg(n+1)。
2、旋转
在红黑树上进行结点插入和删除操作时,会改变树的结构形状,导致结果可能不满足了红黑树的某些性质,为了保证每次插入和删除操作后,仍然能报维持红黑树的性质,需要改变树中某些结点的颜色和指针结构。其中的指针结构的改变通过旋转完成的。书中给出了两种旋转:左旋转和右旋转。如下图是旋转过程:
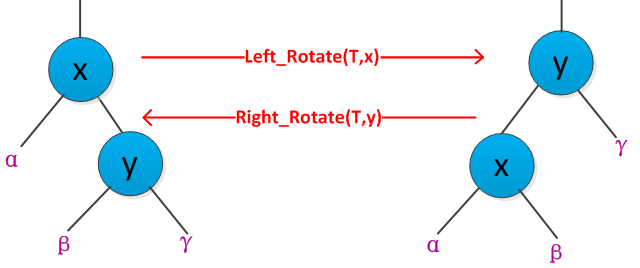
从图可以得出左右旋转的过程,假设对某个结点x进行左旋转,y是x的右孩子,则左旋转过程为:以x和y之间的链为“支轴”进行的,使得x的右孩子为y的左孩子,y的父节点为x的父节点,y的左孩子为x。书中给出了左旋转的伪代码如下:
LEFT_ROTATE(T,x)
y = right[x] //获取右孩子
rihgt[x] = left[y] //设置x的右孩子为y的左孩子
if left[y] != NIL
then parent[left[x]] = x
parent[y] = parent[x] //设置y的父节点为x的父节点
if parent[x] == NIL
then root[T] = y
else if x==left[parent[x]
then left[parent[x]] = y
else right[[parent[x]] = y
left[y] = x //设置y的左孩子为x
parent[x] =y
假设对某个结点y进行右旋转,x是y的左孩子,则左旋转过程为:y的左孩子设置为x的右孩子,将x的父节点设置为y的父节点,x的右孩子设置为y。书中并没有给出右旋转的伪代码,参照左旋转的伪代码很容易实现:
RIGHT_ROTATE(T,y)
x = left[y] //获取左孩子
left[y] = right[x] //设置y的左孩子为x的右孩子
if right[x] != NIL
then parent[right[x]] = y
parent[x] = parent[y] //设为x的父节点为y的父结点
if parent[y] == NIL
then root = x
else if y== left[parent[y]]
then left[parent[y]] = x
else right[parent[y]] = x
right[x] = y //设置x的右孩子为y
parent[y] = x
为了更好的理解旋转操作,书中给出了一个左旋转的例如,如下图所示: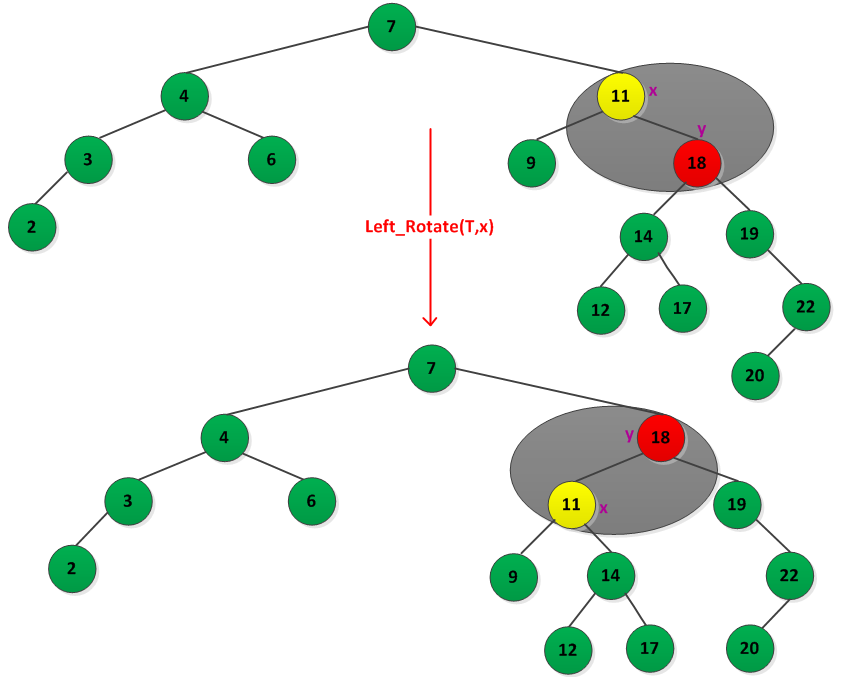
3、插入
红黑树插入一个新结点的过程RB_INSERT是在二叉查找树插入过程的基础上改进的,先按照二叉排序的插入过程插入到红黑树中,然后将新插入的结点标记为红色(疑问:为什么是红色,而不是黑色呢?),然后调用一个辅助的过程RB_INSERT_FIXUP来调整结点并重新着色,使得满足红黑树的性质。关于二叉查找树的插入过程可以参考上一篇日志:http://www.cnblogs.com/Anker/archive/2013/01/28/2880581.html。书中给出了RB_INSERT的伪代码:
RB_INSERT(T,z)
y = NIL
x =root(T)
while x != NIL
do y=x
if key[z]<key[x]
then x=left[x]
else x=right[x]
parent[z] = y
if y =NIL
then root =z
else if key[z] < key[y]
then left[y] =z
else right[y] =z
left[z] = NIL
right[z] =NIL
color[z] = RED //新插入结点标记为红色
RB_INSERT_FIXUP(T,z) //进行调整,使得满足红黑树性质
红黑树的插入过程最主要的是RB_INSERT_FIXUP过程,书中发了很大的篇幅进行介绍。首先分析了当插入一个新的结点后,会破坏红黑树的哪些性质,然后针对可能的破坏性质进行分类讨论并给出了给出了解决办法。因为每次插入的新元素标记为RED,这样可能性质2(根节点为黑色)和性质4(一个红结点的左右孩子都是黑色的)被破坏。例如下图插入一个新结点,破坏了性质4。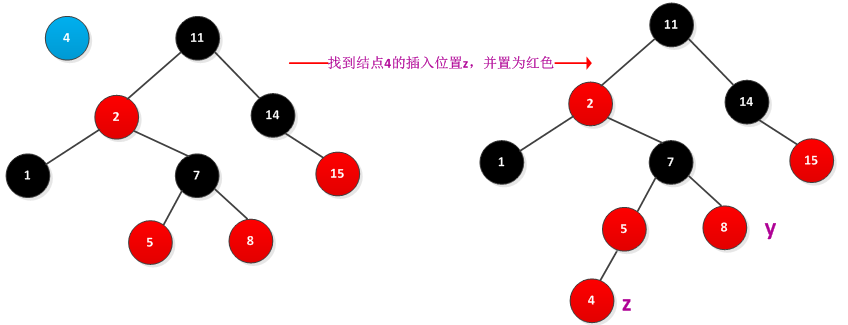
如果每次插入新的结点z导致红黑树性质被破坏,则之多只有一个性质被破坏,并且不是性质2就是性质4。违反性质2是因为z是根且为红色,违反性质4是因为z和其父节点parent[z]都是红色的。
如果性质2被违反了,则红色的根必定是新增的结点z,它是树中唯一的内结点,由于z的父接点和两个子女都是NIL(黑色),不违反性质4。违反性质2在整个插入过程中只有这一次。所以对于违反性质2的结点,直接将其结点变成黑色即可。
剩下的问题是对于违反性质4的处理,在插入新结点z之前,红黑树的性质没有被破坏。插入结点z后违反性质4,必定是因为z和其父亲结点parent[z]都是红色的,此时只违反性质4,而没有违反其他性质。假设新插入结点z,导致红黑树性质4被破坏,此时z和其父节点parent[z]都是红色,由于在插入结点z之前红黑树的性质没有被破坏,parent[z]是红色,很容易推出z的祖父结点parent[parent[z]]必定是黑色。此时根据parent[z]是parent[parent[z]]的左孩子还是右孩子进行讨论。因为左右之间是对称的,书中只给出了parent[z]作为parent[parent[z]]的左孩子进行讨论的,然后给出了三种可能的情况。
情况1):z的叔叔结点y是红色的
此时parent[z]和y都是红色的,解决办法是将z的父节点parent[z]和叔叔结点y都着为黑色,而将z的祖父结点parent[parent[z]]着为红色,然后从祖父结点parent[parent[z]]继续向上判断是否破坏红黑树的性质。处理过程如下图所示:
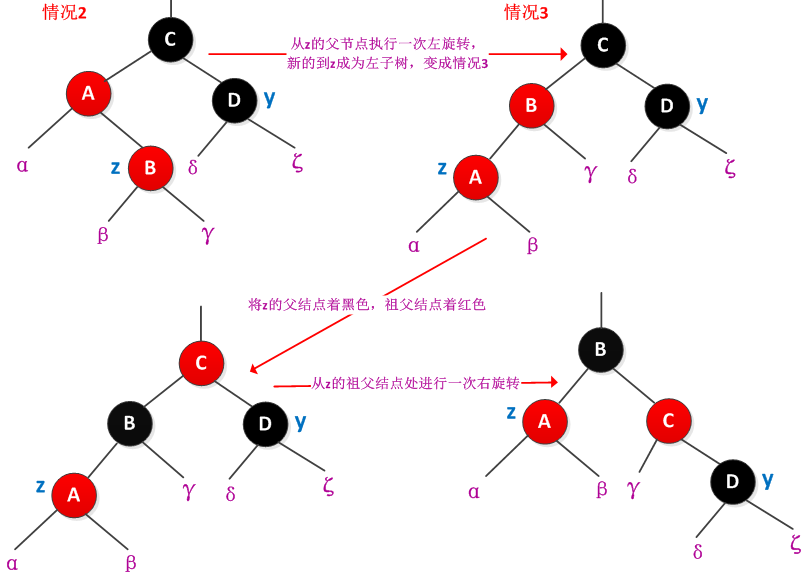
情况2):z的叔叔y是黑色的,而且z是右孩子
情况3):z的叔叔y是黑色的,而且z是左孩子
情况2和情况3中y都是黑色的,通过z是左孩子还是右孩子进行区分的。可以将情况2通过旋转为情况3。情况2中z是右孩子,旋转后成为情况3,使得z变为左孩子,可以在parent[z]结点出使用一次左旋转来完成。无论是间接还是直接的通过情况2进入到情况3,z的叔叔y总是黑色的。在情况3中,将parent[z]着为黑色,parent[parent[z]]着为红色,然后从parent[parent[z]]处进行一次右旋转。情况2、3修正了对性质4的违反,修正过程不会导致其他的红黑性质被破坏。修正过程如下图所示:
给一个完整的例子来说明插入过程,如下图所示:
书中给出了RB_INSERT_FIXUP的伪代码,伪代码中只给出了z的父节点为左孩子的情况,为右孩子的情况与左孩子的情况是对称的,只需将左孩子中的right换成left即可。
RB_INSERT_FIXUP(T,z)
while color[parent[z]] = RED
do if parent[z] == left[parent[parent[z]]]
then y = right[parent[parent[z]]]
if color[y] == RED //情况1,z的叔叔为红色
then color[parent[z]] = BLACK
color[y] = BLACK
color[parent[parent[z]]=RED
z= parent[parent[z]]
else if z == right[parent[z]] //情况2,z的叔叔为黑色,z为右孩子
then z = parent[z]
LEFT_ROTATE(T,z)
color[parent[z]]=BLACK //情况3,z的叔叔为黑色,z为左孩子
color[parent[parent[z]] = RED
RIGHT_ROTATE(T, parent[parent[z]])
else (same as then clause with “right” and “left” exchanged)
color(root(T)) = BLACK; //将根结点设置为黑色
4、删除
删除过程最复杂,看了好多遍才明白个大概,需要反复看,多想删除过程中会破坏哪些性质,然后又针对性的去调整。
红黑树删除结点过程是在二叉查找树删除结点过程的基础改进的。与二叉查找树类似,删除的结点分为三种情况:<1>无左右孩子、<2>有左孩子或者右孩子、<3>既有树=左孩子又有右孩子。删除过程可以参考前一篇日志:http://www.cnblogs.com/Anker/archive/2013/01/28/2880581.html。红黑树在删除结点后需要检查是否破坏了红黑树的性质。如果删除的结点y是红色的,则删除后的树仍然是保持红黑树的性质,因为树中各个结点的黑高度没有改变,不存在两个相邻(父结点和子结点)的红色结点,y是红色不可能是根,所有根仍然是黑色。如果删除的结点z是黑色的,则这个是破坏了红黑树的性质,需要调用RB_DELETE_FIXUP进行调整。从删除结点y的唯一孩子结点x或者是NIL处开始调整。书中给出了RB_DELETE的伪代码:
RB_DELETE(T,z)
if left[z] ==NIL or right[z] == NIL
then y=z
else y=TREE_SUCCESSOR(z)
if left[y] != NIL
then x=left[y]
else x=right[y]
parent[x] = parent[y]
if p[y] ==NIL
then root[T] =x
else if y = left[[prarnt[y]]
then left[parent[y]] = x
else right[parent[y]] =x
if y!=z
then key[z] = key[y]
copy y's data into z
if color[y] == BLACK //当被删除结点为黑色时候进行调整
then RB_DELETE_FIXUP(T,x)
return y
书中分析了被删除结点y是黑色会产生的问题:首先,如果y是根,而y的一个红色孩子变成了新根,则违反了性质2。其次,如果x和parent[y](此时parent[x] = parent[y])都是红色,就违反了性质4。第三,删除y将会导致先前包含y的任何路径上黑结点个数减少1,违反了性质5。书中给出了解决第三个问题的办法:将结点x设为还有额外的一重黑色(此处看的不是很明白,我的理解是是不管是x是什么颜色,将x增加了额外一重黑色,这样可以保证黑结点数目增加1个),即将任意包含结点x的路径上黑结点个数加1,这样可以保证性质5成立。当将黑色结点y被删除时,将其黑色“下推”至其子结点,导致问题变成为结点x可能即不是红,又不是黑,从而违反性质1。因为给x增加了一种颜色,即结点x是双重黑色或者是红黑色。这样就分别给包含x的路径上黑结点个数贡献2个或1个。但是x的color属性仍然是RED(如果x是红黑的)或BLACK(如果x是双重黑色)。换而言之,一个结点额外的黑色反映在x指向它,而不是它的color属性。
过程RB_DELETE_FIXUP恢复性质1,2,4。对于恢复性质2、4很简单,因为x是红色,所有直接将x结点着为黑色即可。书中着重介绍了如何恢复性质1。此时x是黑色,需要根据x是左孩子还是右孩子两种情况进行恢复,因为左右是对称的,书中只给出了x是左孩子的恢复过程。将x作为第一个额外的黑色结点,从x结点开始循环,将额外的黑色结点沿着树向上移,直到:
(1)x指向一个红黑结点,此时将x单独着为黑色。
(2)x指向根,这时可以简单地消除那个额外的黑色,或者
(3)做必要的旋转和颜色改变
在循环过程中,x总是指向具有双重黑色的那个非根结点。设w是x的兄弟结点,因为x是双重黑色的,故w不可能是NIL。书中分四种情况讨论:
情况1:x的兄弟w是红色的
此时因为x是双重黑色,贡献两个黑色结点,所有w必有黑色孩子。此时将w着为黑色,parent[x]为红色,在对parent[x]做一次左旋转。此时x的新兄弟w是黑色,这样将情况1转换为情况2、3或4。情况1的处理过程下图所示: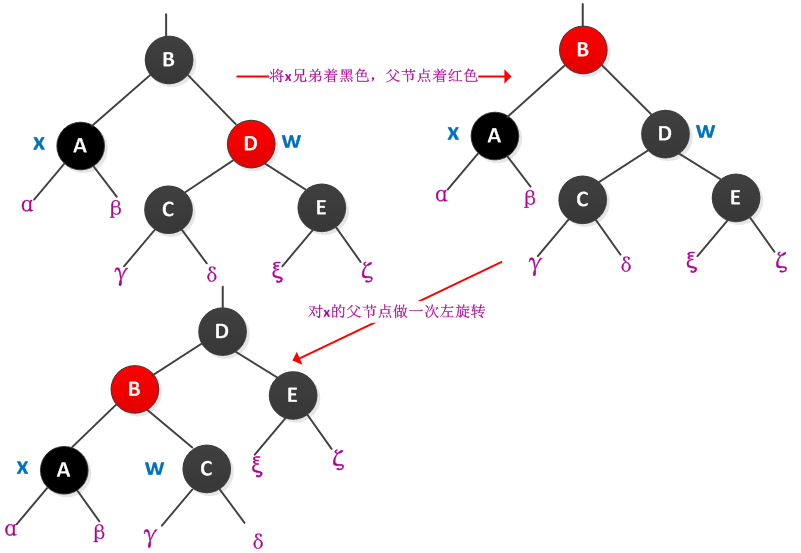
情况2:x的兄弟w是黑色的,而且w的两个孩子都是黑色的。
处理过程是从x和w上去掉一重黑色,即x只有一重黑色而w着为红色,给x的父节点parent[x]添加额外黑色。处理过程如下图所示: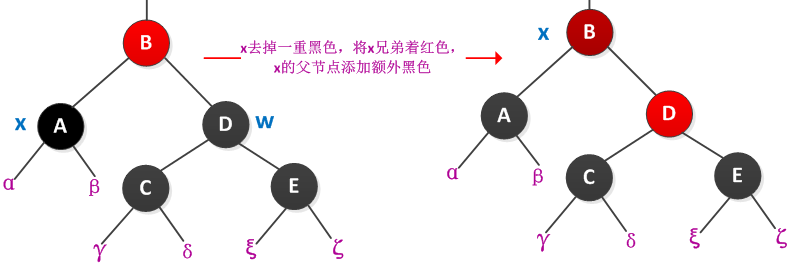
情况3:x的兄弟w是黑色的,w的左孩子是红色的,右孩子是黑色的
交换w和其左孩子left[w]的颜色,并对w进行右旋转。旋转后x的新兄弟w是一个有红色右孩子的黑结点,转换成了情况4。处理过程如下图所示: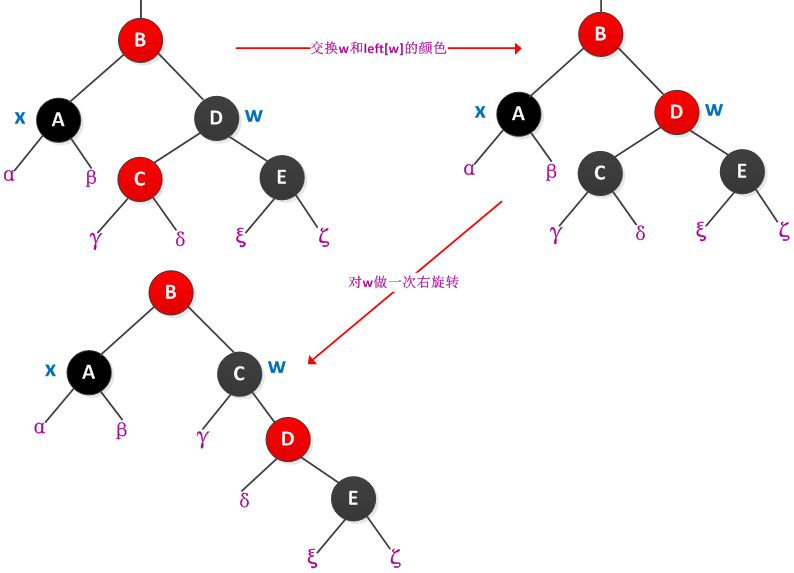
情况4:x的兄弟w是黑色的,而且w的右孩子是红色的。
执行过程是将w的颜色设置为parent[x]的颜色,将parent[x]的颜色设置为黑色,将w的右孩子着为黑色,然后在parent[x]做一次右旋,最后将x设置为根root。处理过程如下图所示:

书中给出了RB_DELETE_FIXUP的伪代码:
RB_DELETE_FIXUP(T,x)
while x!= root[T] and color[x] ==BLACK
do if x == left[parent[x]]
then w = right[parent[x]]
if color[w] == RED //case 1 x的兄弟w是红色的
then color[w] = BLACK
color[parent[x]] = RED
LEFT_ROTATE(T,PARENT[x])
w = right[parent[x]]
if color[left[w]] == BLACK and color[right[w]] = BLACK
then color[w] = RED //case 2
x = parent[x]
else if color[right[w]] =BLACK
then color[left[w]] = BLACK //case 3
color[w] = RED
RIGHT_ROTATE(T,w)
w = right[parent[x]]
color[w] = color[parent[x]] //case 4
color[parent[x]] = BLACK
color[right[w]] = BLACK
LEFT_ROTATE(T,parent[x])
x=root(T)
else(same as then clasue with “right” and “left” exchanged)
color[x]=BLACK
5、编程实现
这一章看了两天,宏观上把握了红黑树的插入和删除操作,中间还有细节问题需要思考。看完后要实现才能消化,于是我采用C++语言设计了简单的红黑树结点和红黑树类,设计的类如下所示:
static const int RED = 0;
static const int BLACK = 1;
template <class T>
class RedBlackTreeNode
{
public:
RedBlackTreeNode():key(T()),parent(NULL),left(NULL),right(NULL),color(BLACK){}
T key;
RedBlackTreeNode<T>* parent;
RedBlackTreeNode<T>* left;
RedBlackTreeNode<T>* right;
int color;
};
template <class T>
class RedBlackTree
{
public:
RedBlackTree();
int search_element(const T& k) const;
int get_minmum(T& retmin)const;
int get_maxmum(T& retmax)const;
int get_successor(const T& k,T& ret) const;
int get_predecessor(const T& k,T& ret) const;
int insert_key(const T& k);
int delete_key(const T& k);
void inorder_tree_walk()const;
RedBlackTreeNode<T>* get_root() const;
~RedBlackTree();
private:
RedBlackTreeNode<T>* root;
static RedBlackTreeNode<T> *NIL;
RedBlackTreeNode<T>* get_parent(RedBlackTreeNode<T>* pnode) const;
RedBlackTreeNode<T>* get_left(RedBlackTreeNode<T>* pnode) const;
RedBlackTreeNode<T>* get_right(RedBlackTreeNode<T>* pnode) const;
T get_key(RedBlackTreeNode<T>* pnode) const;
int get_color(RedBlackTreeNode<T>* pnode) const;
void set_color(RedBlackTreeNode<T>* pnode,int color);
void left_rotate(RedBlackTreeNode<T> *pnode);
void right_rotate(RedBlackTreeNode<T> *pnode);
void rb_insert_fixup(RedBlackTreeNode<T> *pnode);
void rb_delete_fixup(RedBlackTreeNode<T> *pnode);
RedBlackTreeNode<T>* get_maxmum(RedBlackTreeNode<T> *root) const;
RedBlackTreeNode<T>* get_minmum(RedBlackTreeNode<T> *root) const;
RedBlackTreeNode<T>* get_successor(RedBlackTreeNode<T> *pnode) const;
RedBlackTreeNode<T>* get_predecessor(RedBlackTreeNode<T> *pnode) const;
RedBlackTreeNode<T>* search_tree_node(const T& k)const;
void make_empty(RedBlackTreeNode<T>* root);
};
设计过程中采用了C++的模板类型,这样可以支持多种数据类型,使得程序具备扩展性,完整的程序实现如下所示:
#include <iostream>
#include <stack>
using namespace std;
static const int RED = 0;
static const int BLACK = 1;
template <class T>
class RedBlackTreeNode
{
public:
RedBlackTreeNode():key(T()),parent(NULL),left(NULL),right(NULL),color(BLACK){}
T key;
RedBlackTreeNode<T>* parent;
RedBlackTreeNode<T>* left;
RedBlackTreeNode<T>* right;
int color;
};
template <class T>
class RedBlackTree
{
public:
RedBlackTree();
int search_element(const T& k) const;
int get_minmum(T& retmin)const;
int get_maxmum(T& retmax)const;
int get_successor(const T& k,T& ret) const;
int get_predecessor(const T& k,T& ret) const;
int insert_key(const T& k);
int delete_key(const T& k);
void inorder_tree_walk()const;
RedBlackTreeNode<T>* get_root() const;
~RedBlackTree();
private:
RedBlackTreeNode<T>* root;
static RedBlackTreeNode<T> *NIL;
RedBlackTreeNode<T>* get_parent(RedBlackTreeNode<T>* pnode) const;
RedBlackTreeNode<T>* get_left(RedBlackTreeNode<T>* pnode) const;
RedBlackTreeNode<T>* get_right(RedBlackTreeNode<T>* pnode) const;
T get_key(RedBlackTreeNode<T>* pnode) const;
int get_color(RedBlackTreeNode<T>* pnode) const;
void set_color(RedBlackTreeNode<T>* pnode,int color);
void left_rotate(RedBlackTreeNode<T> *pnode);
void right_rotate(RedBlackTreeNode<T> *pnode);
void rb_insert_fixup(RedBlackTreeNode<T> *pnode);
void rb_delete_fixup(RedBlackTreeNode<T> *pnode);
RedBlackTreeNode<T>* get_maxmum(RedBlackTreeNode<T> *root) const;
RedBlackTreeNode<T>* get_minmum(RedBlackTreeNode<T> *root) const;
RedBlackTreeNode<T>* get_successor(RedBlackTreeNode<T> *pnode) const;
RedBlackTreeNode<T>* get_predecessor(RedBlackTreeNode<T> *pnode) const;
RedBlackTreeNode<T>* search_tree_node(const T& k)const;
void make_empty(RedBlackTreeNode<T>* root);
};
template <class T>
RedBlackTreeNode<T>* RedBlackTree<T>::NIL = new RedBlackTreeNode<T>;
template <class T>
RedBlackTree<T>::RedBlackTree()
{
root = NULL;
}
template <class T>
int RedBlackTree<T>::search_element(const T& k) const
{
return (NIL != search_tree_node(k));
}
template <class T>
int RedBlackTree<T>::get_minmum(T& retmin)const
{
if(root)
{
retmin = get_minmum(root)->key;
return 0;
}
return -1;
}
template <class T>
int RedBlackTree<T>::get_maxmum(T& retmax)const
{
if(root)
{
retmax = get_maxmum(root)->key;
return 0;
}
return -1;
}
template <class T>
int RedBlackTree<T>::get_successor(const T& k,T& ret) const
{
RedBlackTreeNode<T>* pnode = search_tree_node(k);
if(pnode != NIL)
{
pnode = get_successor(pnode);
if(pnode != NIL)
{
ret = pnode->key;
return 0;
}
return -1;
}
return -1;
}
template <class T>
int RedBlackTree<T>::get_predecessor(const T& k,T& ret) const
{
RedBlackTreeNode<T>* pnode = search_tree_node(k);
if(pnode != NIL)
{
pnode = get_predecessor(pnode);
if(pnode != NIL)
{
ret = pnode->key;
return 0;
}
return -1;
}
return -1;
}
template <class T>
int RedBlackTree<T>::insert_key(const T& k)
{
RedBlackTreeNode<T> *newnode = new RedBlackTreeNode<T>;
newnode->key = k;
newnode->color = RED;
newnode->left = NIL;
newnode->right = NIL;
newnode->parent = NIL;
if(NULL == root)
root = newnode;
else
{
RedBlackTreeNode<T>* pnode = root;
RedBlackTreeNode<T>* qnode;
while(pnode != NIL)
{
qnode = pnode;
if(pnode->key > newnode->key)
pnode = pnode->left;
else
pnode = pnode->right;
}
newnode->parent = qnode;
if(qnode->key > newnode->key)
qnode->left = newnode;
else
qnode->right = newnode;
}
rb_insert_fixup(newnode);
return 0;
}
template <class T>
int RedBlackTree<T>::delete_key(const T& k)
{
RedBlackTreeNode<T>* pnode = search_tree_node(k);
if(NIL != pnode)
{
RedBlackTreeNode<T>* qnode,*tnode;
if(get_left(pnode) == NIL || get_right(pnode) == NIL)
qnode = pnode;
else
qnode = get_successor(pnode);
if(get_left(qnode) != NIL)
tnode = get_left(qnode);
else
tnode = get_right(qnode);
tnode->parent = get_parent(qnode);
if(get_parent(qnode) == NIL)
root = tnode;
else if(qnode == get_left(get_parent(qnode)))
qnode->parent->left = tnode;
else
qnode->parent->right = tnode;
if(qnode != pnode)
pnode->key = get_key(qnode);
if(get_color(qnode) == BLACK)
rb_delete_fixup(tnode);
delete qnode;
return 0;
}
return -1;
}
template <class T>
RedBlackTree<T>::~RedBlackTree()
{
make_empty(root);
}
template <class T>
RedBlackTreeNode<T>* RedBlackTree<T>:: get_root() const
{
return root;
}
template <class T>
RedBlackTreeNode<T>* RedBlackTree<T>::get_parent(RedBlackTreeNode<T>* pnode) const
{
return pnode->parent;
}
template <class T>
RedBlackTreeNode<T>* RedBlackTree<T>::get_left(RedBlackTreeNode<T>* pnode) const
{
return pnode->left;
}
template <class T>
RedBlackTreeNode<T>* RedBlackTree<T>::get_right(RedBlackTreeNode<T>* pnode) const
{
return pnode->right;
}
template <class T>
T RedBlackTree<T>::get_key(RedBlackTreeNode<T>* pnode) const
{
return pnode->key;
}
template <class T>
int RedBlackTree<T>::get_color(RedBlackTreeNode<T>* pnode) const
{
return pnode->color;
}
template <class T>
void RedBlackTree<T>::set_color(RedBlackTreeNode<T>* pnode,int color)
{
pnode->color = color;
}
template <class T>
void RedBlackTree<T>::left_rotate(RedBlackTreeNode<T> *pnode)
{
RedBlackTreeNode<T>* rightnode = pnode->right;
pnode->right = rightnode->left;
if(rightnode->left != NIL)
rightnode->left->parent = pnode;
rightnode->parent = pnode->parent;
if(pnode->parent == NIL)
root = rightnode;
else if(pnode == pnode->parent->left)
pnode->parent->left = rightnode;
else
pnode->parent->right = rightnode;
rightnode->left = pnode;
pnode->parent = rightnode;
}
template <class T>
void RedBlackTree<T>::right_rotate(RedBlackTreeNode<T> *pnode)
{
RedBlackTreeNode<T>* leftnode = pnode->left;
pnode->left = leftnode->right;
if(leftnode->right != NIL)
leftnode->right->parent = pnode;
leftnode->parent = pnode->parent;
if(pnode->parent == NIL)
root = leftnode;
else if(pnode == pnode->parent->left)
pnode->parent->left = leftnode;
else
pnode->parent->right = leftnode;
leftnode->right = pnode;
pnode->parent = leftnode;
}
template <class T>
void RedBlackTree<T>::rb_insert_fixup(RedBlackTreeNode<T>*pnode)
{
RedBlackTreeNode<T> *qnode,*tnode;
//当pnode的父节点为红色时,破坏性质4
while(get_color(get_parent(pnode))== RED)
{
qnode = get_parent(get_parent(pnode));//祖父结点
if(get_parent(pnode) == get_left(qnode))
{
tnode = get_right(qnode);//pnode的叔叔结点
if(get_color(tnode) == RED) //case1 叔叔结点为红色
{
set_color(get_parent(pnode),BLACK);
set_color(tnode,BLACK);
set_color(qnode,RED);
pnode = qnode;
}
else //case 2 or case 3
{
if(pnode == get_right(get_parent(pnode))) //case2 pnode为右孩子
{
pnode = get_parent(pnode);
left_rotate(pnode);
}
//case3 pnode为左孩子
set_color(get_parent(pnode),BLACK);
qnode = get_parent(get_parent(pnode));
set_color(qnode,RED);
right_rotate(qnode);
}
}
else
{
tnode = get_left(qnode);
if(get_color(tnode) == RED)
{
set_color(get_parent(pnode),BLACK);
set_color(tnode,BLACK);
set_color(qnode,RED);
pnode = qnode;
}
else
{
if(pnode == get_left(get_parent(pnode)))
{
pnode = get_parent(pnode);
right_rotate(pnode);
}
set_color(get_parent(pnode),BLACK);
qnode = get_parent(get_parent(pnode));
set_color(qnode,RED);
left_rotate(qnode);
}
}
}
set_color(root,BLACK);
}
template <class T>
void RedBlackTree<T>::rb_delete_fixup(RedBlackTreeNode<T> *pnode)
{
while(pnode != root && get_color(pnode) == BLACK)
{
RedBlackTreeNode<T> *qnode,*tnode;
if(pnode == get_left(get_parent(pnode)))
{
qnode = get_right(get_parent(pnode));
if(get_color(qnode) == RED)
{
set_color(qnode,BLACK);
set_color(get_parent(pnode),RED);
left_rotate(get_parent(pnode));
qnode = get_right(get_parent(pnode));
}
if(get_color(get_left(qnode)) == BLACK && get_color(get_right(qnode)) == BLACK)
{
set_color(qnode,RED);
pnode = get_parent(pnode);
}
else
{
if(get_color(get_right(qnode)) == BLACK)
{
set_color(get_left(qnode),BLACK);
set_color(qnode,RED);
right_rotate(qnode);
qnode = get_right(get_parent(pnode));
}
set_color(qnode,get_color(get_parent(pnode)));
set_color(get_parent(pnode),BLACK);
set_color(get_right(qnode),BLACK);
left_rotate(get_parent(pnode));
pnode = root;
}
}
else
{
qnode = get_left(get_parent(pnode));
if(get_color(qnode) == RED)
{
set_color(qnode,BLACK);
set_color(get_parent(pnode),RED);
right_rotate(get_parent(pnode));
qnode = get_left(get_parent(pnode));
}
if(get_color(get_right(qnode)) == BLACK && get_color(get_left(qnode)) == BLACK)
{
set_color(qnode,RED);
pnode = get_parent(pnode);
}
else
{
if(get_color(get_left(qnode)) == BLACK)
{
set_color(get_right(qnode),BLACK);
set_color(qnode,RED);
left_rotate(qnode);
qnode = get_left(get_parent(pnode));
}
set_color(qnode,get_color(get_parent(pnode)));
set_color(get_parent(pnode),BLACK);
set_color(get_left(qnode),BLACK);
right_rotate(get_parent(pnode));
pnode = root;
}
}
}
set_color(pnode,BLACK);
}
template <class T>
RedBlackTreeNode<T>* RedBlackTree<T>::get_maxmum(RedBlackTreeNode<T> *root) const
{
RedBlackTreeNode<T> *pnode = root;
while(pnode->right != NIL)
pnode = pnode->right;
return pnode;
}
template <class T>
RedBlackTreeNode<T>* RedBlackTree<T>::get_minmum(RedBlackTreeNode<T> *root) const
{
RedBlackTreeNode<T> *pnode = root;
while(pnode->left != NIL)
pnode = pnode->left;
return pnode;
}
template <class T>
RedBlackTreeNode<T>* RedBlackTree<T>:: get_successor(RedBlackTreeNode<T> *pnode) const
{
if(pnode->right != NIL)
return get_minmum(pnode->right);
RedBlackTreeNode<T>* parentnode = get_parent(pnode);
while(parentnode != NIL && get_right(parentnode) == pnode)
{
pnode = parentnode;
parentnode = get_parent(pnode);
}
return parentnode;
}
template <class T>
RedBlackTreeNode<T>* RedBlackTree<T>::get_predecessor(RedBlackTreeNode<T> *pnode) const
{
if(pnode->left != NIL)
return get_maxmum(pnode->left);
RedBlackTreeNode<T>* parentnode = get_parent(pnode);
while(parentnode != NIL && get_left(parentnode) == pnode)
{
pnode = parentnode;
parentnode = get_parent(pnode);
}
return parentnode;
}
template <class T>
RedBlackTreeNode<T>* RedBlackTree<T>:: search_tree_node(const T& k)const
{
RedBlackTreeNode<T>* pnode = root;
while(pnode != NIL)
{
if(pnode->key == k)
break;
else if(pnode->key > k)
pnode = pnode->left;
else
pnode = pnode->right;
}
return pnode;
}
template <class T>
void RedBlackTree<T>::make_empty(RedBlackTreeNode<T>* root)
{
if(root)
{
RedBlackTreeNode<T> *pleft = root->left;
RedBlackTreeNode<T>* pright = root->right;
delete root;
if(pleft != NIL)
make_empty(pleft);
if(pright != NIL)
make_empty(pright);
}
}
template <class T>
void RedBlackTree<T>::inorder_tree_walk()const
{
if(NULL != root)
{
stack<RedBlackTreeNode<T>* > s;
RedBlackTreeNode<T> *ptmpnode;
ptmpnode = root;
while(NIL != ptmpnode || !s.empty())
{
if(NIL != ptmpnode)
{
s.push(ptmpnode);
ptmpnode = ptmpnode->left;
}
else
{
ptmpnode = s.top();
s.pop();
cout<<ptmpnode->key<<":";
if(ptmpnode->color == BLACK)
cout<<"Black"<<endl;
else
cout<<"Red"<<endl;
ptmpnode = ptmpnode->right;
}
}
}
}
int main()
{
RedBlackTree<int> rbtree;
int value;
rbtree.insert_key(41);
rbtree.insert_key(38);
rbtree.insert_key(31);
rbtree.insert_key(12);
rbtree.insert_key(19);
rbtree.insert_key(8);
cout<<"root is: "<<rbtree.get_root()->key<<endl;
cout<<"Inorder walk red black tree:"<<endl;
rbtree.inorder_tree_walk();
if(rbtree.get_minmum(value) == 0)
cout<<"minmum is: "<<value<<endl;
if(rbtree.get_maxmum(value) == 0)
cout<<"maxmum is: "<<value<<endl;
if(rbtree.get_successor(19,value) == 0)
cout<<"19 successor is: "<<value<<endl;
if(rbtree.get_predecessor(19,value) == 0)
cout<<"19 predecessor is: "<<value<<endl;
if(rbtree.delete_key(38)==0)
cout<<"delete 38 successfully"<<endl;
cout<<"root is: "<<rbtree.get_root()->key<<endl;
cout<<"Inorder walk red black tree:"<<endl;
rbtree.inorder_tree_walk();
return 0;
}
程序测试结果如下所示:

实现过程中感触非常多,需要很大的耐心去调试程序,关键的是insert和delete操作。
第十四章:数据结构的扩张
前言:通常我们会遇到一些问题,采用一些标准的数据结构,如双链表、散列表或二叉查找数时,不能够满足操作要求,需要对这些数据结构进行扩张,添加一些额外的信息使得能够完成新的操作。附加的信息需要对数据结构的某些操作进行调整,这个是非常关键的步骤,决定着数据结构扩张是否能够实现。本章主要讨论了红黑树结构的扩张,介绍了两种扩张方式。第一种方式扩张使得红黑色能够支持动态集合上顺序统计,快速找出集合中第i小的数,或给出某个元素在集合的全序中的排名。第二种方式扩张使得红黑色能够进行区间操作,可以很快地找到集合中覆盖的区间。关于红黑色请参考第13章,http://www.cnblogs.com/Anker/archive/2013/01/30/2882773.html。
1、动态顺序统计
在第九章介绍了顺序统计的概念,大概的意思是在包含有n个元素的集合中,第i个顺序统计量指的是该集合中第i小的元素。在一个无序的集合中,任意顺序统计量都可以在O(n)时间内找到,详细情况可以参考http://www.cnblogs.com/Anker/archive/2013/01/25/2877311.html。书中在此基础上修改红黑树的结构,使得任意的顺序统计量都可以再O(lgn)时间内确定。向红黑树的结构中添加一个size域,表示包含自身节点的当前节点的子树节点的数目。这样修改后可以快速支持顺序统计量操作,将这种修改后的红黑树叫做:顺序统计量树T。修改后的结构如下所示:
struct RBTreeNode
{
int key;
int color;
struct RBTreeNode *parent;
struct RBTreeNode *left;
struct RBTreeNode *right;
int size;
};
例如给定红黑树的一个节点x,则size[x] = size[left[x]]+size[right[x]]+1。size[x]为包含以x为根的子树的节点数(包含x本身),即子树的大小。如果哨兵定义为0,即设置size[nil[T]]=0。
下面给出一个修改后的红黑树的例子,如下图所示:

红黑树是二叉排序树,按照中序遍历从小到大输出红黑树中的关键字。从图中可以看出,添加size域后,很方便看出每个节点的子树的节点数目(包含自身节点)。书中在后面讨论这种结构的操作,分别讨论如下:
(1)检索具有给定排序的元素
过程OS_SELECT(x,i)返回一个指向以x为根的子树中包含第小关键字的结点的指针,即为了找出顺序统计量树T中的第i小关键字,可以调用OS_SELECT(root[T],i)。书中给出了伪代码如下:
OS_SELECT(x,i)
r = size[left[x]]+1; //先计算x的处于的位置
if i = r //x正好是第i小的关键字
then return x; else if i < r //x比第i关键字大,则在其左子树查找
then return OS_SELECT(left[x],i)
else return OS_SELECT(right[x],i-r) //x比第i关键字小,则在其右子树查找
该过程类似二分查找,每一次递归调用都在顺序统计数中下降一层,故最坏情况下OS_SELECT的总时间与树的高度成正比,红黑树的高度为lgn。故OS_SELECT的运行时间为:O(lgn)。
(2)确定一个元素的秩(位置)
给定指向一顺序统计树T中节点x的指针,求x在顺序统计树中序遍历得到的线性序中的位置。书中给出了OS_RANK(T,x)过程的伪代码:
OS_RANK(T,x)
r = size[left[x]]+1; //获取以x为根子树中x的位置(中序遍历)
y = x;
while y != root[T] //从下向上直到根节点
do if y = right[p[y]] //如果是右子树
then r = r + size[left[p[y]]]+1;
y = p[y]; //向上移动
return r;
从程序总可以看出当y == root[T]时候循环终止,此时以y为根的子树是课完整树,此时r值是这颗整树中key[x]的秩。while循环中的每一次迭代花O(1)时间,且y在每次迭代中沿树上升一层,故在最坏情况下0S_RANK的运行时间与树的高度成正比:对含n个节点的顺序统计树时间为O(lgn)。
(3)对子树规模的维护
在红黑树中添加size域后,能够通过OS_SELECT和OS_RANK迅速计算出所需的顺序统信息。通过修改红黑树的插入和删除操作,在此过程是通过旋转来修改size域。关于这部分需要在红黑树的基础上进行改进,比较复杂,暂时没有实现。
2、如何扩张数据结构
对一种数据结构的扩张过程分为四个步骤:
1)选择基础数据结构
2)确定要在基础数据结构中添加哪些信息
3)验证可用基础数据结构上的基本修改操作来维护这些新添加的信息
4)设计新的操作
书中给出了对红黑树进行扩张的定理,并给出了证明,这个看的时候有些难度,暂时跳过了。大概意思就是说当红黑树被选作基础数据结构时,某些类型的附加信息总是可以用插入和删除来进行有效地维护。
3、区间树
这小结讲的是扩张红黑树以支持由区间构成的动态集合上的操作。区间可以很方便的表示各占用一段连续时间的一些事情。区间树是一种动态集合进行维护的红黑树,该集合中的每个元素x都包含在一个区间int[x]。区间树支持下列操作:
INTERVAL_INSERT(T,x):将包含区间域int的元素x插入到区间树T中
INTERVAL_DELETE(T,X):从区间树T中删除元素x
INTERVAL_SEARCH(T,i):返回一个指向区间树T中元素x的指针,使int[x]与i重叠,若集合中无此元素存在,则返回nil[T]。
修改红黑树得到的区间树如下图所示:
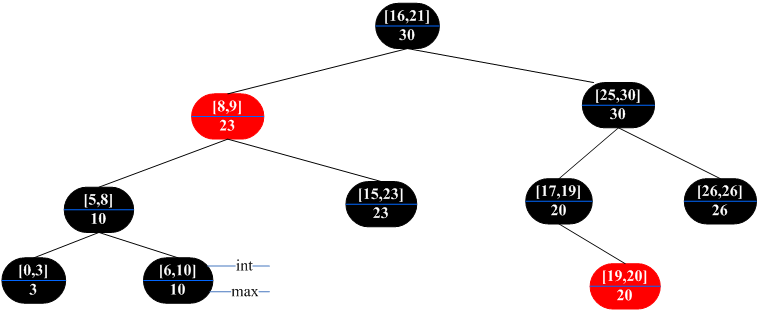
从图可以看出,对区间树以每个节点的左端点值进行中序变量即可得到有序的序列。有了区间树的结果就很容易实现其相关操作。
4、总结
本章主要是介绍一种数据结构扩张的方法,灵活性非常之大。以红黑树作为例子,我是在年前看的红黑树,并给以实现。年后了,对红黑树忘了差不多了。呵呵,真是一天不学习,赶不上啦。本章看完比较郁闷,没有去实现。实现的难度非常具有挑战性,何时能够实现,我心里有些忐忑。肯定不会放弃,一定会找个时间把这些实现一下。
