C++11 线程同步接口std::condition_variable和std::future的简单使用
std::condition_variable
条件变量std::condition_variable有wait和notify接口用于线程间的同步。如下图所示,Thread 2阻塞在wait接口,Thread 1通过notify接口通知Thread 2继续执行。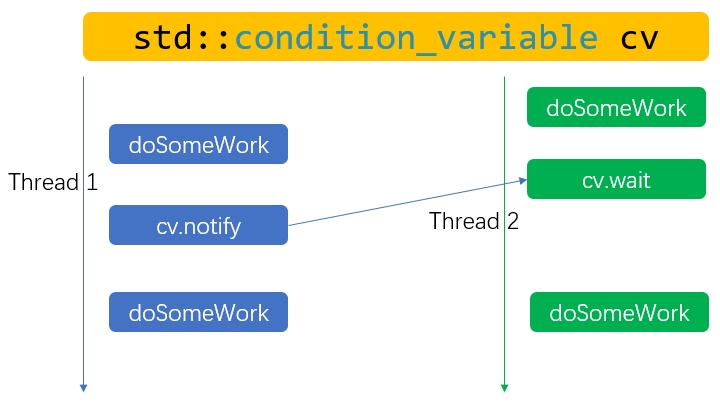
具体参见示例代码:
#include<iostream>
#include<mutex>
#include<thread>
#include<queue>
std::mutex mt;
std::queue<int> data;
std::condition_variable cv;
auto start=std::chrono::high_resolution_clock::now();
void logCurrentTime()
{
auto end = std::chrono::high_resolution_clock::now();
auto elapsed = std::chrono::duration_cast<std::chrono::milliseconds>(end - start).count();
std::cout << elapsed << ":";
}
void prepare_data()
{
logCurrentTime();
std::cout << "this is " << __FUNCTION__ << " thread:" << std::this_thread::get_id() << std::endl;
for (int i = 0; i < 10; i++)
{
data.push(i);
logCurrentTime();
std::cout << "data OK:" << i << std::endl;
}
//start to notify consume_data thread data is OK!
cv.notify_one();
}
void consume_data()
{
logCurrentTime();
std::cout << "this is: " << __FUNCTION__ << " thread:" << std::this_thread::get_id() << std::endl;
std::unique_lock<std::mutex> lk(mt);
//wait first for notification
cv.wait(lk); //it must accept a unique_lock parameter to wait
while (!data.empty())
{
logCurrentTime();
std::cout << "data consumed: " << data.front() << std::endl;
data.pop();
}
}
int main()
{
std::thread t2(consume_data);
//wait for a while to wait first then prepare data,otherwise stuck on wait
std::this_thread::sleep_for(std::chrono::milliseconds(10));
std::thread t1(prepare_data);
t1.join();
t2.join();
return 0;
}
输出结果
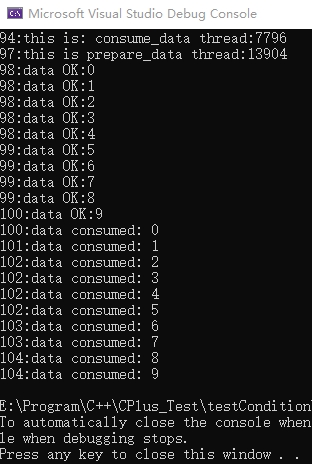
分析
主线程中另启两个线程,分别执行consume_data和prepare_data,其中consume_data要先执行,以保证先等待再通知,否则若先通知再等待就死锁了。首先consume_data线程在从wait 处阻塞等待。后prepare_data线程中依次向队列写入0-10,写完之后通过notify_one 通知consume_data线程解除阻塞,依次读取0-10。
std::future
std::future与std::async配合异步执行代码,再通过wait或get接口阻塞当前线程等待结果。如下图所示,Thread 2中future接口的get或wait接口会阻塞当前线程,std::async异步开启的新线程Thread1执行结束后,将结果存于std::future后通知Thread 1获取结果后继续执行.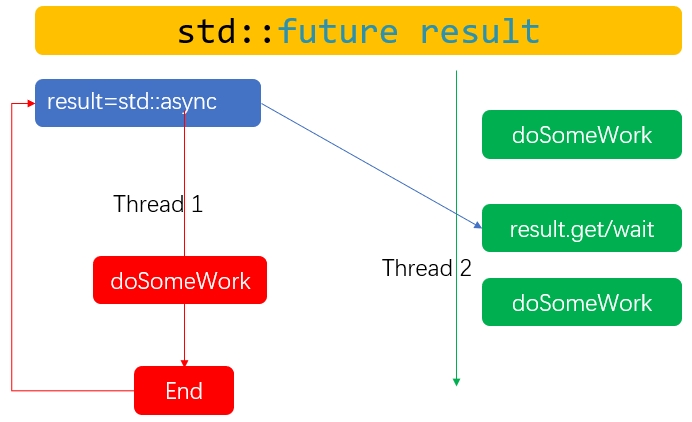
具体参见如下代码:
#include <iostream>
#include <future>
#include<thread>
int test()
{
std::cout << "this is " << __FUNCTION__ << " thread:" << std::this_thread::get_id() << std::endl;;
std::this_thread::sleep_for(std::chrono::microseconds(1000));
return 10;
}
int main()
{
std::cout << "this is " <<__FUNCTION__<<" thread:" << std::this_thread::get_id() << std::endl;;
//this will lanuch on another thread
std::future<int> result = std::async(test);
std::cout << "After lanuch a thread: "<< std::this_thread::get_id() << std::endl;
//block the thread and wait for the result
std::cout << "result is: " <<result.get()<< std::endl;
std::cout << "After get result "<< std::endl;
return 0;
}
输出结果
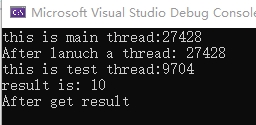
分析
主程序中调用std::async异步调用test函数,可以看到main函数的线程ID 27428与test函数执行的线程ID 9704并不一样,说明std::async另起了一个新的线程。在test线程中,先sleep 1000ms,所以可以看到"After lanuch a thread:"先输出,说明主线程异步执行,不受子线程影响。而"After get result "最后输出,说明get()方法会阻塞主线程,直到获取结果。
作者:robot2017
出处:https://www.cnblogs.com/stephen2023/p/18416810
版权:本文版权归作者和博客园共有
转载:欢迎转载,但未经作者同意,必须保留此段声明;必须在文章中给出原文连接;否则必究法律责任
出处:https://www.cnblogs.com/stephen2023/p/18416810
版权:本文版权归作者和博客园共有
转载:欢迎转载,但未经作者同意,必须保留此段声明;必须在文章中给出原文连接;否则必究法律责任

 浙公网安备 33010602011771号
浙公网安备 33010602011771号