2020 CCPC Wannafly Winter Camp Day1 Div.1&2 D 生成树 基尔霍夫矩阵带权版,线性代数求导
题:https://ac.nowcoder.com/acm/contest/3979/D
题意:题意是:有n个点,有2个边集构成了2个图G1,G2。要求在G1中的每个生成树有多少条边同时在G2中存在
分析:基尔霍夫矩阵带权值版本,在g1中权值为0,同时在g1,g2中权值为1,(因为0为没价值,所以我们用1代表0,x代表1),求生成树的权值和;
得到的基尔霍夫矩阵主子式行列式为f(x)=∑ai *xi 这里的ai代表权值为权值为 i 的生成树的方案数,所以答案:Σi*ai 即等价于f ' (1);
求导过程如图: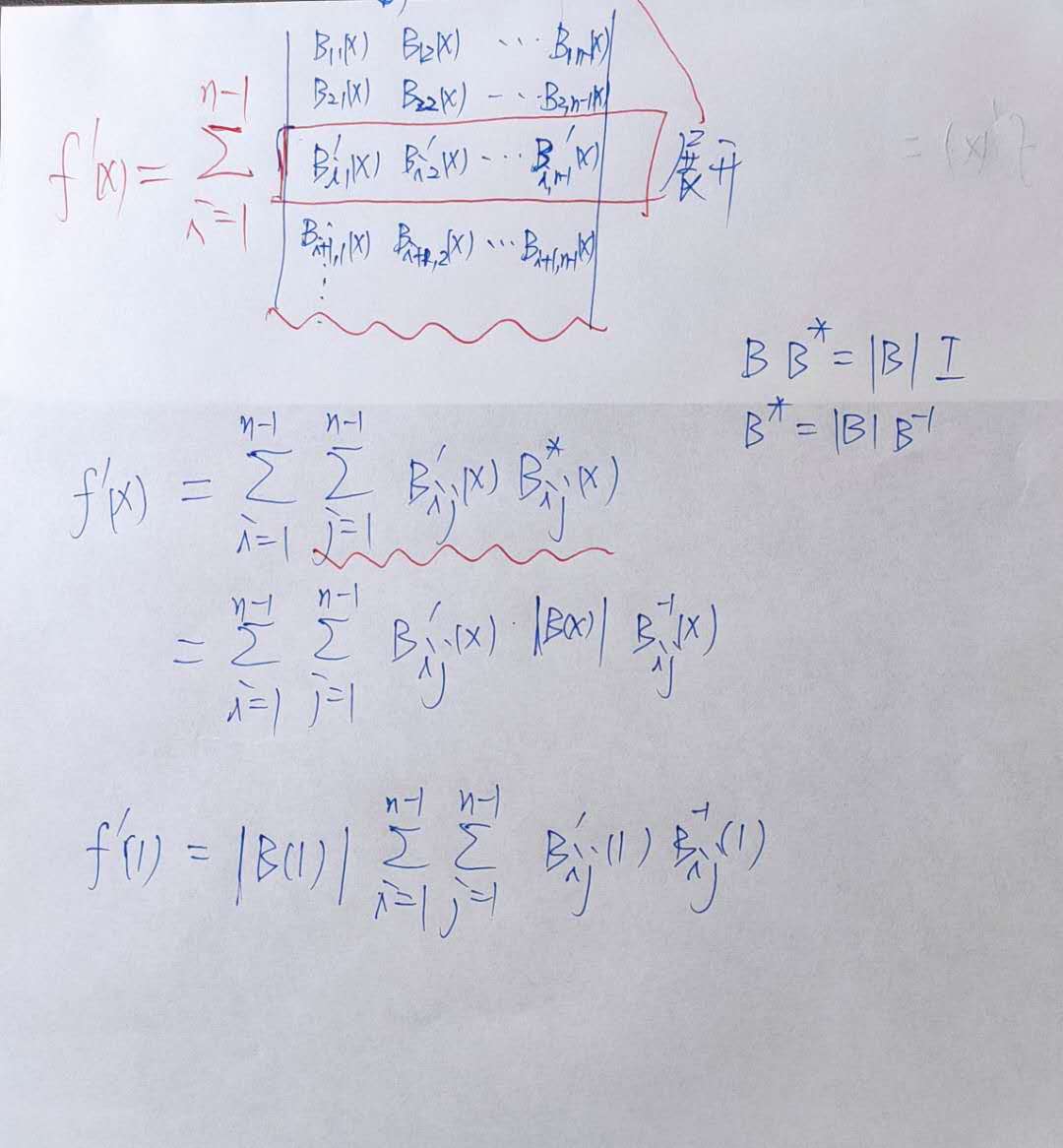
所以只要求|B(1)| 以及B' 和B的逆矩阵;
其中B‘ 即为代码中的g2,因为B的每个位置只会有1个x;|B(1)|为D;B-1为inv;


#include<bits/stdc++.h> using namespace std; typedef long long ll; #define pb push_back const int inf=0x3f3f3f3f; const ll INF=1e18; const int M=404; const int mod=998244353; ll g1[M][M],g2[M][M],x[M]; char s[M]; ll ksm(ll x,ll y){ ll t=1; while(y){ if(y&1) t=(t*x)%mod; x=(x*x)%mod; y>>=1; } return t; } ll A[M][M]; ll Det(int n){///求行列式 ll res=1; for(int i=1;i<=n;i++){ for(int j=i;j<=n;j++){ if(A[j][i]!=0){ swap(A[i],A[j]); if(i!=j) res*=-1; break; } } for(int j=i+1;j<=n;j++){ ll c=A[j][i]*ksm(A[i][i],mod-2)%mod; for(int k=i;k<=n;k++) (A[j][k]-=c*A[i][k])%=mod; } } for(int i=1;i<=n;i++) (res*=A[i][i])%=mod; res=(res+mod)%mod; return res; } ll G[M][M],inv[M][M]; ///利用将G转化为单位矩阵进而将单位矩阵inv转化为G的逆矩阵 void Gauss(int n){ for(int i=1;i<=n;i++){ for(int j=i;j<=n;j++){ if(G[j][i]!=0){ swap(G[i],G[j]); swap(inv[i],inv[j]); break; } } ll c=ksm(G[i][i],mod-2); for(int j=1;j<=n;j++) (G[i][j]*=c)%=mod,(inv[i][j]*=c)%=mod; ///将同列消成0 for(int j=1;j<=n;j++){ if(i!=j){ c=G[j][i]; for(int k=1;k<=n;k++){ (G[j][k]-=c*G[i][k])%=mod; (inv[j][k]-=c*inv[i][k])%=mod; } } } } } void Inv(int n){ for(int i=1;i<=n;i++){ inv[i][i]=1; for(int j=1;j<=n;j++) G[i][j]=A[i][j]; } Gauss(n); } int main(){ int n; scanf("%d",&n); for(int i=1;i<=n;i++){ scanf("%s",s+1); for(int j=1;j<=n;j++){ g1[i][j]=s[j]-'0'; if(i<j&&g1[i][j]){ A[i][i]++,A[j][j]++; A[i][j]--,A[j][i]--; } } } for(int i=1;i<=n;i++){ scanf("%s",s+1); for(int j=1;j<=n;j++){ g2[i][j]-=g1[i][j]&(s[j]-'0'); if(i!=j) g2[i][i]-=g2[i][j]; } } Inv(n-1); ll D=Det(n-1); ll ans=0; for(int i=1;i<=n-1;i++) for(int j=1;j<=n-1;j++){ ans=(ans+inv[i][j]*D%mod*g2[i][j]%mod+mod)%mod; } printf("%lld\n",ans); return 0; }
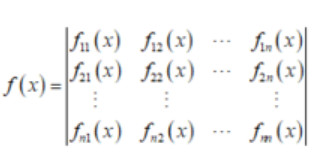
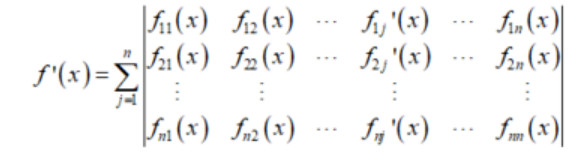
矩阵求导法则:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号