Learning OpenCV Lecture 7 (Detecting and Matching Interest Points)
In this chapter, we will cover:
- Detecting Harris corners
- Detecting FAST features
- Detecting the scale-invariant SURF features
- Describing SURF features
Detecting Harris corners
The basic OpenCV function for detecting Harris corners is called cv::cornerHarrisand is straightforward to use. You call it on an input image and the result is an image of floats which gives the corner strength at each pixel location. A threshold is then applied on this output image in order to obtain a set of detected corners. This is accomplished by the following code:
// Detect Harris Corners
cv::Mat cornerStrength;
cv::cornerHarris(image, cornerStrength,
3, // neighborhood size
3, // aperture size
0.01 // Harris parameter
);
// threshold the corner strengths
cv::Mat harrisCorners;
double threshold = 0.0001;
cv::threshold(cornerStrength, harrisCorners, threshold, 255, cv::THRESH_BINARY_INV);
cv::imshow("Original Image", image);
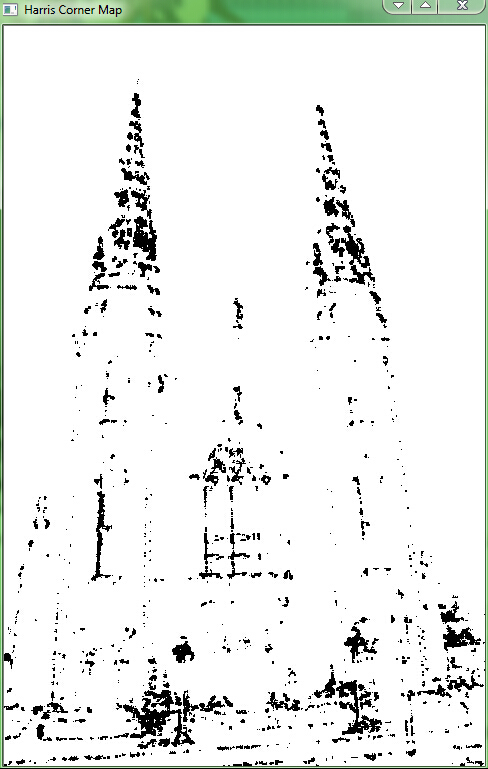
cv::imshow("Harris Corner Map", harrisCorners);
Here is the original image:

The result is a binary map image shown in the following screenshot which is inverted for better viewing (that is, we used cv::THRESH_BINARY_INVinstead of cv::THRESH_BINARYto get the detected corners in black):
The class encapsulates the Harris parameters with their default values and corresponding getter and setter methods (which are not shown here):
#if !defined HARRISDETECTOR
#define HARRISDETECTOR
#include <core/core.hpp>
#include <highgui/highgui.hpp>
#include <imgproc/imgproc.hpp>
class HarrisDetector {
private:
// 32-bit float image of corner strength
cv::Mat cornerStrength;
// 32-bit float image of threshold corners
cv::Mat cornerTh;
// image of local maxima (internal)
cv::Mat localMax;
// size of neighborhood for derivatives smoothing
int neighborhood;
// aperture for gradient computation
int aperture;
// Harris parameter
double k;
// maximum strength for threshold computation
double maxStrength;
// calculated threshold (internal)
double threshold;
// size of neighborhood for non-max supression
int nonMaxSize;
// kernel for non-max supression
cv::Mat kernel;
public:
HarrisDetector() : neighborhood(3), aperture(3),
k(0.01), maxStrength(0.0),
threshold(0.01), nonMaxSize(3) {
// create kernel used in non-max supression
setLocalMaxWindowSize(nonMaxSize);
}
void setLocalMaxWindowSize(int nonMaxSize) {
this->nonMaxSize = nonMaxSize;
}
// Compute Harris corners
void detect(const cv::Mat &image) {
// Harris computation
cv::cornerHarris(image, cornerStrength,
neighborhood, // neighborhood size
aperture, // aperture size
k // Harris parameter
);
// internal threshold computation
double minStrength; // not used
cv::minMaxLoc(cornerStrength, &minStrength, &maxStrength);
// local maxima detection
cv::Mat dilated; //temporary image
cv::dilate(cornerStrength, dilated, cv::Mat());
cv::compare(cornerStrength, dilated, localMax, cv::CMP_EQ);
}
// Get the corner map from the comuted Harris values
cv::Mat getCornerMap(double qualityLevel) {
cv::Mat cornerMap;
// thresholding the corner strength
threshold = qualityLevel * maxStrength;
cv::threshold(cornerStrength, cornerTh, threshold, 255, cv::THRESH_BINARY);
// convert to 8-bit image
cornerTh.convertTo(cornerMap, CV_8U);
// non-maxima suppression
cv::bitwise_and(cornerMap, localMax, cornerMap);
return cornerMap;
}
// Get the feature points from the computed Harris value
void getCorners(std::vector<cv::Point> &points, double qualityLevel) {
// Get the corner map
cv::Mat cornerMap = getCornerMap(qualityLevel);
// Get the corners
getCorners(points, cornerMap);
}
// Get the features points from the computed corner map
void getCorners(std::vector<cv::Point> &points, const cv::Mat &cornerMap) {
// Iterate over the pixels to obtain all features
for (int y = 0; y < cornerMap.rows; y++) {
const uchar *rowPtr = cornerMap.ptr<uchar>(y);
for (int x = 0; x < cornerMap.cols; x++) {
// if it is a feature point
if (rowPtr[x]) {
points.push_back(cv::Point(x, y));
}
}
}
}
// Draw circles at feature point locations on an image
void drawOnImage(cv::Mat &image, const std::vector<cv::Point> &points,
cv::Scalar color = cv::Scalar(255, 255, 255),
int radius = 3, int thickness = 2) {
std::vector<cv::Point>::const_iterator it = points.begin();
// for all corners
while (it != points.end()) {
// draw a circle at each corner location
cv::circle(image, *it, radius, color, thickness);
++ it;
}
}
};
#endif
Using this class, the detection of the Harris points is accomplished as follows:
// Using HarrisDetector Class
// Create Harris detector instance
HarrisDetector harris;
// Compute Harris values
harris.detect(image);
// Detect Harris corners
std::vector<cv::Point> pts;
harris.getCorners(pts, 0.01);
// Draw Harris corners
harris.drawOnImage(image, pts);
cv::imshow("Harris Corners", image);
Which results in the following image:

Additional improvements can be made to the original Harris corner algorithm. This section describes another corner detector found in OpenCV which expands the Harris detector to make its corners more uniformly distributed across the image. As we will see, this operator has an implementation in the new OpenCV 2 common interface for feature detector.
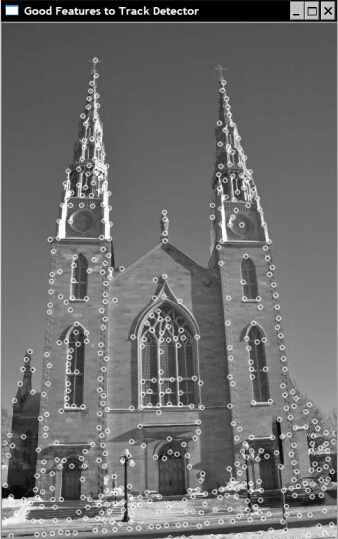
Good features to track:
// Compute good features to track
std::vector<cv::Point2f> corners;
cv::goodFeaturesToTrack(image,corners,
500, // maximum number of corners to be returned
0.01, // quality level
10); // minimum allowed distance between points
In addition to the quality-level threshold value, and the minimum tolerated distance between interest points, the function also uses a maximum number of points to be returned (this is possible since points are accepted in order of strength). The preceding function call produces the following result:
Detecting FAST features
In this recipe, we present another feature point operator. This one has been specifically designed to allow quick detection of interest points in an image. The decision to accept or not to accept a keypoint being based on only a few pixel comparisons.
Using the OpenCV 2 common interface for feature point detection makes the deployment of any feature point detectors easy. The one presented in this recipe is the FAST detector. As the name suggests, it has been designed to be quick to compute. Note that OpenCV also proposes a generic function to draw keypoints on an image:
// Detection FAST features
image = cv::imread("../church01.jpg");
// vector of keypoints
std::vector<cv::KeyPoint> keypoints;
// Construction of the Fast feature detector object
cv::FastFeatureDetector fast(40); // threshold for detection
// feature point detection
fast.detect(image, keypoints);
// draw keypoints on an image
cv::drawKeypoints(image, //original image
keypoints, // vector of keypoints
image, // the output image
cv::Scalar(255, 255, 255), // key point color
cv::DrawMatchesFlags::DRAW_OVER_OUTIMG // drawing flag
);
cv::imshow("FAST Features", image);
By specifying the chosen drawing flag, the keypoints are drawn over the output image, thus producing the following result:

Detecting the scale-invariant SURF features
The OpenCV implementation of SURF features also use the cv::FeatureDetector interface. Therefore, the detection of these features is similar to what we demonstrated in the previous recipes of this chapter:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号